Vehículos aéreos no tripulados nacionales. Parte II

En 1950, la oficina de diseño No. 301, encabezada por S.A. Lavochkin, se le encomendó el desarrollo del producto "203". La Fuerza Aérea era el cliente directo, porque necesitaban una "herramienta de entrenamiento" para los pilotos, el avión objetivo. Se suponía que el dispositivo era desechable y, como resultado, lo más barato posible. Como resultado, los diseñadores crearon un avión controlado por radio con un ala recta y cola horizontal, así como una quilla directa (todo por facilidad de fabricación y bajo costo). Como planta de energía, eligió el motor de gasolina de reacción directa RD-800. Debido al diámetro en 80, véalo colocado en una góndola debajo del fuselaje. En caso de que el piloto no pueda derribar al objetivo, se le proporcionó un sistema de aterrizaje de paracaídas en su diseño. El piloto automático de potencia y el control por radio se llevaron a cabo desde el generador en el fuselaje delantero, en cuyo eje se encontraba el impulsor. Como resultado, el objetivo resultó ser muy simple de fabricar y bastante barato. Curiosamente, "203" no tenía una bomba de combustible; en cambio, la gasolina se suministraba al motor a través de un cilindro con aire comprimido. El lanzamiento del objetivo se planeó inicialmente para llevarse a cabo desde el avión Tu-2 (la granja de sujeción estaba ubicada en la parte superior del fuselaje), pero esto no era seguro. Por lo tanto, el transportista era el Tu-4, que, entre otras cosas, podía levantar dos objetivos al aire a la vez. Pero con el sistema de aterrizaje tuve que hacer pequeños retoques: no importaba cómo no estuviera terminado, el objetivo no quería caer en paracaídas. Al final, decidieron plantar el vehículo, que recibió el índice La-17 en KB, "en el vientre": a baja altura, el avión entró en paracaídas y aterrizó directamente en el motor.

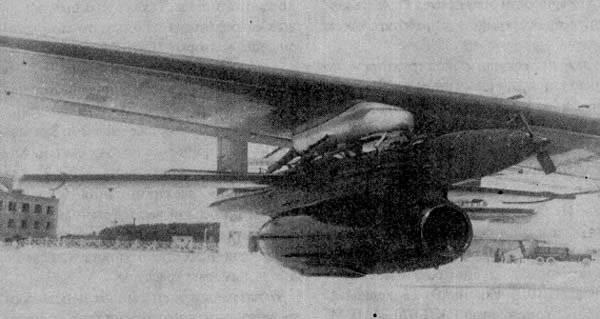
Las pruebas han demostrado que este método de aterrizaje tiene derecho a la vida, pero el motor recibirá daños que no son compatibles con otras operaciones. Sin embargo, en 1963, el La-17 se hizo cargo, y las "lesiones" en el aterrizaje casi no causaron ningún problema, la mayoría de los pilotos tenían marcas suficientes para que el objetivo no viviera para ver su segundo vuelo. En 1956, comenzaron las pruebas de La 17M. La nueva versión del objetivo tenía un nuevo motor, un mayor alcance y la posibilidad de un lanzamiento en tierra.
Seis años después del inicio del trabajo en "203", a OKB-301 se le asignó la tarea de desarrollar un avión de reconocimiento táctico no tripulado. La Xnumx fue propuesta como la base de un decreto gubernamental. Estructuralmente, "17-FR" (el cifrado de la resolución del gobierno) apenas difería del objetivo del prototipo. En la nariz del fuselaje, se instaló una instalación oscilante debajo de la cámara aérea AFA-BAF-203P, con la posibilidad de su reemplazo adicional por uno más nuevo. "40-FR", según el proyecto original, tuvo que desconectarse del transportista Tu-203 a altitudes de aproximadamente siete kilómetros y volar en modo automático sobre las posiciones del enemigo. El rango estimado en esta etapa de diseño se determinó en 4 km. Si fuera necesario, podría aumentarse ligeramente: para esto, el programa de vuelo debía calcularse teniendo en cuenta el apagado del motor a una distancia del punto de partida y la planificación posterior (sobre 170 km desde una altura de 50 km). En 7, se cambiaron los requisitos para 1958-FR: el rango era de al menos 203 km, y la velocidad tenía que superar 100 km / h. El proyecto se finalizó para una nueva tarea y se le cambió el nombre a La-800РБ.

Casi al mismo tiempo, se creó un lanzador de reconocimiento terrestre. A finales de los 60, los requisitos del cliente cambiaron nuevamente, pero ahora la principal actualización en ellos se refería al uso reutilizable, aunque el proyecto recibió un nuevo código "204". Ahora el nombre La-17R ha sido asignado al explorador. Motor de próxima versión zumbido eligió el turborreactor RD-9BK y el despegue se realizó con dos propulsores de combustible sólido. La composición del equipo de a bordo también ha cambiado: se han actualizado el piloto automático y la cámara, y además de esta última, se ha introducido una cámara aérea de baja altitud. Para facilitar el transporte de un explorador en un lanzador de transporte, el ala se plegó. Como resultado, durante las pruebas, se revelaron las siguientes características tácticas y técnicas del explorador: a una velocidad de vuelo de 700-800 km / h, tenía un alcance de 50-60 km y 200 km a una altitud de vuelo de 900 y 7000 metros, respectivamente. Explorador de aterrizaje realizado en paracaídas. El rendimiento del UAV satisfizo al cliente y en 1963 entró en producción el La-17R. El dispositivo estuvo en servicio durante unos diez años, pero su uso práctico se limitó a unos pocos ejercicios. No pudo participar en la batalla.
No es un explorador ni un diseñador de objetivos Mikoyan
Incluso ahora, muchos años después del comienzo del trabajo en el avión no tripulado, casi todos estos dispositivos realizan solo dos funciones: realizar el reconocimiento o atacar objetivos en tierra. Sin embargo, hubo excepciones, incluso si eran demasiado raras para "hacer el clima". En medio de 1958, el OKB-155, encabezado por A.I. A Mikoyan, se le asignó la tarea de desarrollar un vehículo aéreo no tripulado capaz de acelerar a 4500-4700 km / h, ascender a una altitud de hasta 30 km y tener un rango de kilómetros de 1600. El nicho táctico que el proyecto P-500 debía ocupar era un nuevo interceptor revolucionario. Se suponía que el complejo de intercepción C-500, además del interceptor no tripulado, tenía varios radares de detección y guía, así como complejos de lanzamiento con el P-500. En 1960, el CB Mikoyan y Gurevich presentaron un borrador de diseño.
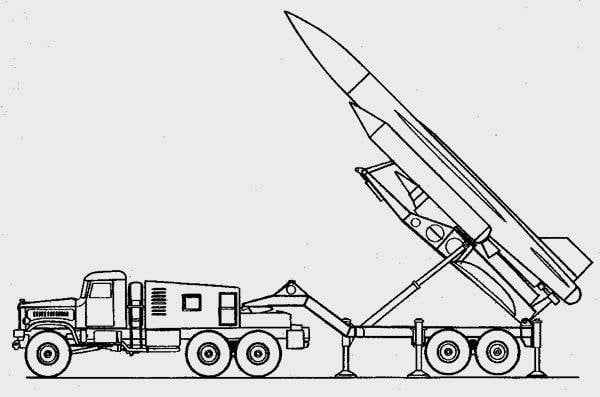
El esquema del lanzador autopropulsado C-500 con el misil interceptor P-500. Esquema del libro "historia Diseños de aviones en la URSS. 1951-1965 ".
Externamente, el P-500 parecía un avión de alas altas con un ala delta y una cola en pleno giro. Además, los estabilizadores, además de la función de ascensor, se utilizaron para el control del balanceo a altas velocidades. Se colocó un motor Ramjet RD-085 en la góndola del motor debajo del fuselaje trasero, y dos aceleradores de arranque se cayeron después del despegue y la aceleración hacia el 2М estaba debajo del ala. El proyecto ha organizado al cliente, pero ... En 1961, el trabajo se detuvo. El enemigo probable en este momento no tenía bombarderos hipersónicos o misiles de crucero con los que el P-500 pudiera luchar. Y en el futuro, no se previeron, además, no aparecieron incluso después de 50 años.
P-500 no fue el único trabajo de la oficina de diseño de Mikoyan en el campo de los UAV. Solo el resto de su desarrollo difícilmente puede llamarse UAV en el sentido completo de la palabra: estos fueron el misil de crucero KS-1 y sus modificaciones, así como los objetivos controlados por radio basados en el MiG-15, MiG-19, etc.
"Insectos" Yakovlev Design Bureau
Al comienzo de 80-x en la oficina de diseño A.S. Yakovlev recibió una cantidad considerable de información sobre la explotación de sus UAV por parte de las tropas israelíes durante las últimas guerras en ese momento. Teniendo en cuenta los desarrollos existentes y la información de "trofeos", los ingenieros crearon la primera versión del drone "Bee". Esta unidad podría realizar tareas de inteligencia televisiva táctica, trabajar como repetidor de señales de radio o utilizar la guerra electrónica. Durante las pruebas de un lote experimental de estos UAV, se descubrieron todas las ventajas y desventajas del diseño, después de lo cual, para el año 90, se llevaron a cabo importantes actualizaciones. Drone actualizado recibió el nombre de "Bee-1T". Junto con el Instituto de Investigación "Kulon", desarrollaron un complejo de equipo terrestre que consiste en un vehículo de lanzamiento blindado con una guía, un control de antena y un radar de rastreo, un vehículo de transporte que transporta a las Abejas y un vehículo de comando y control. Todo el complejo de reconocimiento fue nombrado Stroy-P. Desde el final del 10 del siglo pasado, han llegado tiempos desagradables para nuestra industria de defensa, por decirlo suavemente. También afectaron el destino de "Bee", un complejo que se completó en 80-th año, se adoptó solo después de siete años. Se informó que en los años 90 y 1995, la abeja participó en la primera y segunda guerras chechenas. El complejo "Stroy-P" demostró ser excelente, sin embargo, debido a la escasez de fondos al comienzo de 99, el último de los complejos utilizados desarrolló su recurso. Se desconoce más sobre el uso de "Abejas" y hay razones para suponer que ya no se usan.
El diseño del dron en sí es el siguiente: ala alta con ala recta. Para facilitar el transporte, se dobla alrededor de un eje vertical y se encuentra a lo largo del fuselaje. El grupo de hélices está ubicado en la parte trasera del fuselaje y consiste en un motor de pistón P-032 de dos tiempos (32 hp) y una hélice encerrada en un canal anular. Curiosamente, este último se utiliza no solo como un medio para optimizar el funcionamiento del tornillo, sino también como un timón de altura y dirección. En la nariz del fuselaje hay un módulo giratorio con una cámara de televisión u otro equipo objetivo. El sistema de control de radio y el piloto automático están ubicados en la parte central de las "Abejas". Los aviones no tripulados de despegue producen con una guía colocada en el vehículo de lanzamiento utilizando dos aceleradores. El vuelo se lleva a cabo ya sea por los comandos del operador o por un programa previamente almacenado en la memoria de automatización. A una velocidad de crucero de aproximadamente 150 km / hy altitudes a 3000, el Bee-1T puede estar en el aire durante aproximadamente dos horas, y el rango del complejo es de 60 km (algunas fuentes mencionan que esta limitación se debe a la electrónica). Drone de aterrizaje hecho con un paracaídas, y el impacto en la superficie es compensado por cuatro bastidores con amortiguación neumática. La carga útil "Abejas" consiste en una cámara o cámara termográfica. La sustitución del módulo correspondiente se realiza mediante las fuerzas de cálculo durante varios minutos. Un dron se puede usar hasta cinco veces después de lo cual debe enviarse para su reparación o reciclaje. También es posible utilizar el "Bees-1T" como un objetivo controlado por radio para entrenar a los artilleros antiaéreos. En esta configuración, en lugar de un módulo de cámara, se instala un conjunto de equipos de radio: el transpondedor, los reflectores, etc., y en el fuselaje trasero están montados marcadores que imitan el escape del avión.

En 1985, Yakovlev Design Bureau comenzó a trabajar en el UAV Bumblebee-1. A partir de entonces, la "abeja" difirió ligeramente más grande en tamaño y peso. Al final de la década, durante el refinamiento de ambos proyectos, se decidió continuar trabajando solo en Bee y aplicar todo el trabajo en el abejorro.
Rotorcraft UAs "Ka"
Poco antes del colapso de la Unión Soviética, se trataron temas aéreos no tripulados. N.I. Kamov En colaboración con la compañía surcoreana DHI, creó un helicóptero no tripulado Ka-37. El dispositivo con dos tornillos coaxiales y dos motores de pistón fue desarrollado como un UAV multiusos. En el fuselaje del helicóptero, se puede arreglar cualquier carga de las dimensiones y el peso apropiados: una cámara, un equipo de monitoreo de radiación o cualquier carga, por ejemplo, equipo o medicamentos. El rango del dron no supera 20-22 km. El vuelo se puede llevar a cabo automáticamente, mediante los comandos del operador o en modo mixto. El operador controla el helicóptero sobre la radio desde la consola. El helicóptero y el control remoto se pueden empacar en un contenedor especial de transporte con la posibilidad de transporte en automóvil.

En 1999, el helicóptero Ka-137 del complejo multifuncional MBVC-137 primero voló en el aire. El complejo se desarrolló en tres versiones: tierra, aeromóvil y barco. En el primer caso, hasta cinco UAV y el sistema de control se transportan en un camión especialmente equipado, en el segundo, la consola se coloca en un helicóptero y en el tercero, en el barco correspondiente. La conducción de un vuelo es generalmente similar a la del Ka-37: automáticamente, por comando o en modo cooperativo. De particular interés es el diseño del Ka-137. Para reducir el efecto del viento en el helicóptero, su fuselaje se hizo esférico, lo que le dio al diseño una apariencia original. Estructuralmente, el Ka-137 se divide en dos hemisferios. En la parte superior se encuentra todo el grupo de hélices con un motor de pistón de producción alemana Hirht 2706 R05 (HP 65), en la parte inferior: la carga útil. Los sujetadores de este último se colocan simétricamente con relación al eje vertical del aparato, lo que también agrega estabilidad y facilita el control. El peso máximo de la carga útil es 80 kg. Las dimensiones están limitadas solo por el tamaño del hemisferio inferior, pero si es necesario, puede operar el helicóptero sin él. Sobre la esfera del fuselaje con un diámetro de aproximadamente 1,75 m hay dos tornillos coaxiales 530-centímetro. Cuatro trenes de aterrizaje de materiales compuestos se colocan a los lados del fuselaje y se unen directamente a la unidad de alimentación. El equipo de control colocado en el automóvil, helicóptero o barco, le permite utilizar simultáneamente dos UAV.
El siglo XXI comienza ...
A pesar de los claros éxitos de la industria nacional en el campo de los vehículos aéreos no tripulados, el interés de los clientes potenciales aún era insuficiente. Sólo a mediados de la primera década del siglo XXI, la situación comenzó a cambiar. Quizás la razón de esto fue la exitosa experiencia de usar varios UAV en las últimas operaciones de la OTAN. Las fuerzas de seguridad y los equipos de rescate se han interesado cada vez más en los UAV y, como resultado, en los últimos años ha habido un verdadero auge en la construcción de esta clase de equipos. La cuenta de los tipos de vehículos aéreos no tripulados ya está ocurriendo por docenas, así que ahora veamos brevemente el más notable de ellos.

En 2007, hubo información de que el trabajo en el proyecto Tu-300 Kite se reanudó en Tupolev. Hizo su primer vuelo de regreso en 1991, pero la situación económica de esa década obligó al programa a congelarse. De acuerdo con el concepto original, se suponía que el avión no tripulado de tres toneladas debía realizar el reconocimiento de fotos, televisión o radio dentro de 150-170 km desde el punto de partida. La velocidad de crucero "Kite", a su vez, estuvo al nivel del reconocimiento anterior de la marca "Tu", aproximadamente 950 km / h. El equipo de reconocimiento de objetivos estaba ubicado en la nariz del fuselaje en forma de huso. El ala del avión no tripulado es triangular, se coloca en la sección de la cola de la aeronave (el propio UAV se realiza de acuerdo con el esquema de "pato"). La entrada de aire del turborreactor, como antes, se encuentra debajo de la quilla. En algunas demostraciones aéreas, se demostró un modelo de un Tu-300 con un contenedor KMGU suspendido debajo del fuselaje, lo que fue percibido por la comunidad cercana a la aviación como un indicio de un posible uso del dispositivo por descarga.

También en 2007, en la exposición MAKS, se mostró un simulacro de la firma MiG llamada Skat. Un ala volante con un peso máximo de despegue del orden de 10 toneladas debe acelerar a 800-850 km / hy tener un alcance de aproximadamente 4000 km. A juzgar por la apariencia del diseño, la planta de energía del avión no tripulado consiste en un motor turborreactor con una toma de aire frontal. En cuanto a las armas y la aviónica, todavía no se sabe nada a este respecto, aunque se exhibieron bombas y modelos de misiles junto con el Skat en el MAKS-2007. Del mismo modo, la situación es con el calendario del proyecto.

Además de las antiguas agencias de diseño, las empresas jóvenes participan en la creación de UAV. Uno de ellos es CJSC Aerokon, que produce drones de la serie Inspector. En esta línea hay tanto dispositivos de "ala volante" como el esquema clásico. Además, los productos de Aerocon tienen diferentes tamaños y peso de despegue: desde 250 grams y 30, consulte el tramo del ala del Inspector-101 a 120 kg y 520, consulte Inspector-601. Aunque estos dispositivos se posicionan como multiuso, se usan principalmente para foto o telecontrol.
Otra firma que recientemente se ha involucrado en el tema de los UAV es la Irkut Corporation. Sus drones también están adaptados para disparos y operaciones similares. La lista de productos Irkut incluye tanto vehículos pequeños controlados por radio como el planeador con motor Irkut-850, que se puede usar en configuración no tripulada o tripulada. Los UAV de Irkut se envían a varios países del mundo, así como a estructuras de energía doméstica, incluido el Ministerio de Situaciones de Emergencia y el Comité de Investigación.

ZALA es una gama de UAV fabricados por la compañía Unmanned Systems con sede en Izhevsk. A diferencia de las dos compañías anteriores, ZALA no es solo aviones, sino también helicópteros. Los drones Izhevsk son similares a los Irkuts e Inspectores. El interés en ZALA muestra el MO ruso y MIA.
***
Ya es obvio que los vehículos aéreos no tripulados tienen un gran futuro. A veces incluso se afirma que desplazan por completo a los tripulados. Aviación. Al mismo tiempo, el UAV tiene una serie de problemas que aún no les permiten realizar completamente algunas de las tareas de la "gran" aviación. Pero, al mismo tiempo, los drones tienen ventajas. Entonces, por ejemplo, un dispositivo que cuelga sobre un campo de batalla es difícil de detectar y destruir con los medios existentes. Y en el campo de las operaciones de rescate, los UAV en algunos casos, como la detección de personas desaparecidas, etc., resultan ser aún más efectivos que los vehículos tripulados. Por lo tanto, en el futuro cercano nadie desplazará a nadie, pero las diferentes clases de equipos se complementarán entre sí.
información