Tropas de ingeniería submarina. Parte de 2

Parte dos Mejora y desarrollo de la máquina.
A finales de la década de 1970. quedó claro que el reconocimiento submarino era demasiado costoso. Se necesitaba un oficial para su gestión, lo que resultó ser poco práctico. Además, el sistema de control hidráulico era complicado. Al mismo tiempo, los gateos submarinos produjeron muchos falsos positivos, y este es uno de los principales dispositivos de reconocimiento. En general, surgió la pregunta sobre la simplificación, la modernización de la máquina y, en consecuencia, sobre su abaratamiento. Además, en este momento aparecieron ecosondas que permitieron determinar la densidad del suelo desde la superficie del agua. Es decir, la posibilidad de cruzar tanques a través de una barrera de agua podría determinarse sin sumergirse bajo el agua.
Por lo tanto, en la planta OGK-2 Kryukovsky se diseñó un nuevo oficial de inteligencia: el producto "78", que recibió el cifrado "Berkut". La nueva máquina es el desarrollo del oficial de inteligencia IPR, pero, como se mencionó anteriormente, en una versión simplificada. El "Águila Dorada" no se hunde bajo el agua, sino que funciona solo a flote. Como la base del coche se usó el antecesor de carrocería duradera con motor diesel, transmisión, instrumentos y bisagras. El Berkut se distinguió por la ausencia de tanques de lastre y tanques para aire comprimido, no había una cámara de aire para la salida del buzo, el dispositivo RDP, etc.
El nuevo avión de reconocimiento estaba destinado a realizar un reconocimiento de ingeniería: la identificación de los pases de los tanques en terrenos accidentados en tierra y en barreras de aguas poco profundas, incluida la definición de campos minados. Para este propósito, se instaló un detector de minas digital de hoy en día Kolyun y dos elementos inductivos externos en varillas deslizantes hidráulicas. Se aseguraron de que cada elemento inductivo estuviera ubicado en la zona de medición y en la distancia requerida.

Reconocimiento submarino "Berkut" - cartel educativo
El explorador puede realizar su trabajo en la zona de acción contraria del enemigo: el cuerpo tiene protección contra armas, y en la torreta giratoria se instaló la ametralladora Kalashnikov con b / c en municiones 1000. Además, dentro de los compartimentos de control y de la tripulación, se proporciona la colocación de metralletas y cartuchos 3 AKM-S para ellos, una pistola 150-mm de señal con dos juegos de cartuchos, granadas de mano 26 y 10 kg kg BB. La caja del explorador se divide en siete compartimentos y se sella, lo que garantiza la flotabilidad de la máquina.
La máquina tiene protección antinuclear, química y biológica, un sistema de extinción de incendios, un dispositivo de drenaje y un sistema de enmascaramiento TDA. Para la observación de día y de noche, así como para la orientación en el suelo, se instalan las siguientes máquinas: periscopio PIR-451, que le permite observar desde la máquina tanto en tierra como en el agua; Dispositivos de observación TPNO-160; Horizonte artificial AGI (instalado frente a un mecánico militar), que muestra los ángulos de inclinación longitudinales y transversales del terreno; Equipo de navegación THA-3, que incluye un gyrocursouxteel, un panel de control, un indicador de dirección, etc. -2, periscopio PIR de inteligencia de ingeniería, puntero DSP-2, etc.


Unas pocas palabras sobre el ecosonda. Está diseñado para medir las profundidades, el perfil de la parte inferior de la barrera contra el agua, la detección de obstáculos de navegación en la columna de agua con el registro de toda la información en papel electrotérmico. El rango de profundidad medido es de 0,5 a 20 M. Un rollo de papel es suficiente para trabajar durante 2 horas a una velocidad de la máquina en agua 5 km / h. Al operar la sonda acústica, la máquina debe mantener una velocidad constante en el agua. Al mismo tiempo, para determinar la escala horizontal del batigrama capturado (dibujo del perfil inferior en el papel), es necesario determinar el ancho de la barrera contra el agua utilizando un periscopio (u otros dispositivos).
La tripulación del explorador estaba formada por personas de 6:
1. Comandante de la máquina dirige las acciones de la tripulación, compila y transmite informes de inteligencia a través de la estación de radio P-123 y (o) por escrito. Funciona directamente con el equipo de navegación, el detector de minas CC-2, la sonda acústica y el periscopio PIR-451.
2. Conductor. Conduce el coche, trabaja con horizonte artificial, mide la velocidad del caudal del río.
3. Operador de radio tirador. Supervisa el terreno, es responsable de la seguridad de la tripulación, destruye los objetivos detectados por decisión del comandante, es responsable del funcionamiento de la estación de radio y realiza intercambios de radio siguiendo las instrucciones del comandante del vehículo.
4. Zapador mayor. Supervisa las acciones de los zapadores cuando trabajan fuera del automóvil, supervisa el funcionamiento del equipo de navegación, decide destruir o neutralizar las minas encontradas.
5. Primer zapador Responsable de la condición de los detectores de minas, trabajando fuera de la máquina, trabajando con los detectores de minas IMP y RVM-2, preparando y llevando a cabo operaciones de voladura.
6. El segundo zapador. Funciona con un dispositivo de medición de distancia (DST-451) y un instrumento de inspección de ingeniería para el diseño y la inspección.
Al final de 1978, se tomó una decisión sobre las pruebas de campo del Berkut en diversas condiciones climáticas. La etapa de invierno de las pruebas se llevó a cabo sobre la base de la Escuela Superior de Ingeniería de Tyumen. El grupo formado por Yuri Artyushenko, Nikolai Lynnik, Georgy Ignatov, Vladimir Bazdyrev, encabezado por el diseñador jefe adjunto de OGK - 2 Alexander Ehnich y un representante del cliente, el mayor de los ingenieros de ingeniería Valery Razombeev, salió de la fábrica para realizar pruebas.

En pruebas en Tyumen. De izquierda a derecha: George Ignatov, Alexander Ehnich, Yevgeny Senatorov, Vladimir Bazdyrev y Nikolai Lynnik
Tyumen se encontró con una helada de treinta grados. Desde el aeropuerto, en el frío PAZIKI, llegamos a la aldea de los militares en el lago St. Andrew, donde se encontraba la base técnica de la escuela. Al día siguiente, inspeccionó el equipo. No se encontraron violaciones de la integridad del casco y los sistemas. La etapa principal de la prueba fue verificar la operatividad del equipo y la tripulación a bajas temperaturas (el día de la prueba, los sensores especiales de la máquina mostraron "-43 grados"). Para empezar era necesario arrancar el motor del coche refrigerado. El calentador del motor y las transmisiones de la máquina se habían sometido previamente a pruebas similares en un avión de reconocimiento submarino y, por lo tanto, no tenían problemas. Después de un tiempo, se puso en marcha el motor y el automóvil del estacionamiento con la tripulación y los inspectores se trasladó al relleno sanitario.

La siguiente etapa de la prueba "Berkuta" fue el camino a lo largo de una ruta cerrada, cuando las escotillas del automóvil fueron aplastadas y el movimiento se llevó a cabo utilizando el dispositivo de navegación TNA-3. La tripulación del automóvil era la siguiente: un mecánico - conductor - sargento del servicio militar, el comandante - un representante del cliente Valery Razombeev y el tercero en la prueba era un miembro de la comisión, un médico militar, que tenía que registrar los signos vitales de la tripulación. La ruta era difícil, terreno accidentado, cubierto de arbustos y árboles raros. Alrededor de nieve profunda. El compartimiento habitable de la máquina tenía un calentador de aire con potencia limitada.
Los deberes del comandante eran determinar las coordenadas de los indicadores TNA-3 y dar las órdenes necesarias al mecánico: conductor del movimiento en un curso determinado. El comandante y el conductor podían inspeccionar el área frente a él solo a través de triplex y negociar con la "base" a través de la radio. Las pruebas se realizaron a lo largo de 5 horas. El error al llegar al punto especificado fue solo unos metros después de la marcha de 30-kilómetro.
¡Pero hubo un incidente en la ruta! El doctor perdió el conocimiento y tuvo que dar ayuda. De hecho, era un pasajero, no veía la carretera y estaba mareado. Cuando abrieron las escotillas al llegar, vieron que todo estaba helado en el aliento de la tripulación. Pero la gente y la tecnología no decepcionaron.
Durante las pruebas se realizaron disparando una ametralladora. Los arbustos se utilizaron como objetivos en un parapeto que encierra un campo de tiro. ¡Las ramas de los arbustos se dispersaron muy efectivamente! Después de la fase de invierno, se llevaron a cabo pruebas similares en Bielorrusia, en el campo de pruebas cerca de Grodno, y en Turkmenistán, cerca de Chardzhou. Pero en las máquinas de producción, tal sistema no se instaló en la mayoría de los casos.

De acuerdo con los resultados de la prueba, el producto "Berkut" de 78A fue puesto en servicio por las tropas de ingeniería del ejército soviético en 1980 con el nombre de "vehículo de reconocimiento de ingeniería" del IRM.

Más tarde, de acuerdo con los resultados de la guerra en Afganistán, se mejoró el automóvil: se instaló una segunda torreta con una ametralladora para garantizar el disparo en dos direcciones. El coche recibió un índice no oficial IRM-2. Más tarde, en la torreta (más precisamente, la timonera) solo quedaba una brecha para disparar con armas personales. Hoy, esta versión del IRM está en servicio con las tropas de ingeniería de las antiguas repúblicas soviéticas. En el momento del colapso de la URSS, se lanzaron alrededor de aviones de reconocimiento 80.

Cartel educativo nach.1980's, donde una torre.
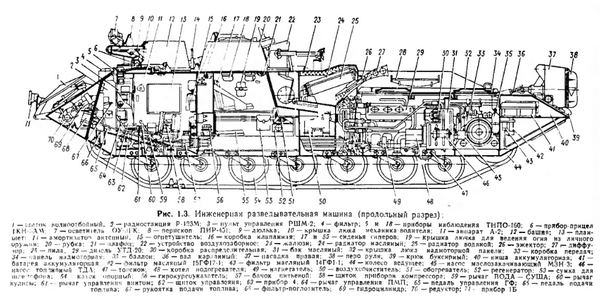
Sección longitudinal del IRM del TO para 1990, donde dos torres son claramente visibles

La segunda torreta con una abertura (a la izquierda en el tablero debajo de los instrumentos de observación) para disparar desde brazos pequeños
Los mayores inconvenientes de la máquina incluyen el hecho de que el IWW no detecta minas en una caja de madera y plástico. Necesita mejorar la red de arrastre, al menos en el cuchillo. Además, el IRM no tolera una explosión explosiva en una mina: el casco estalla a lo largo de las costuras de soldadura, etc. Después de la guerra en Afganistán, los IRM tuvieron la oportunidad de hacer algo de guerra en Tayikistán, pero no hay datos sobre la efectividad del uso de máquinas en este conflicto. El último hecho de la participación de la IWW en las hostilidades se relaciona con la guerra en el este de Ucrania.

IRM -2 "Escarabajo" en Tayikistán

IRM-2 en las calles de Lugansk, 2015
En Murom, recientemente en conjunto con la Escuela Técnica Superior de Moscú. Bauman fue diseñado arrastre "Pasaje" (Información del sitio strangernn.livejournal.). Para la máquina base se tomó inteligencia de ingeniería IRM-2. Este es un complejo de desminado que consiste en una red de arrastre de choque, diseñado para el MES. La máquina funciona en el modo de control remoto, cableado o por radio. Por supuesto, esto no es aplicable en condiciones de combate, el canal de radio se aplastará fácilmente (y el rodamiento también puede volar al rodamiento), pero no vale la pena hablar de la confiabilidad de un canal cableado en un campo minado. Pero en condiciones pacíficas o para el "desminado humanitario", es bastante normal. El riesgo de muerte del conductor en caso de una reunión con una bomba de poder anormal es eliminado por la cavidad.


Aplicación de la máquina
El reconocimiento de ingeniería IRM en reconocimiento opera como parte de la patrulla de reconocimiento de ingeniería, reforzada por la unidad de desminado con los medios de reconocimiento y superación de los centros de costos. Con el lanzamiento del reconocimiento de armas combinadas en la orilla opuesta, comienza el reconocimiento de una barrera de agua. De acuerdo con la tarea, el comandante de la máquina especifica los límites del cruce. Al mismo tiempo, los zapadores de reconocimiento están llevando a cabo el reconocimiento de la franja costera por la presencia de un centro de costos.

Al utilizar el cérvix-2, debe tenerse en cuenta que el ancho de su búsqueda garantiza la seguridad de la máquina solo en movimiento en línea recta. Los turnos no pueden gastar más que 9 granizo. y al menos 10 m en un sitio. El ángulo de rotación está controlado por el encabezamiento de la máquina. Con la salida de la máquina al agua, el detector de minas se transfiere a la posición de caminata. Penetrometr está determinado por la permeabilidad del fondo en el borde del agua, especifique la dirección de alineación del movimiento de la máquina en el agua. La grabación del perfil inferior se produce a flote mediante una sonda acústica. El número de carreras está determinado por el tamaño de las secciones de los cruces y en el área puede ser de dos a tres o más. En una de las carreras está determinada por la velocidad del río. El auto se detiene, y el mecánico - conductor, aumentando (disminuyendo) las revoluciones, mantiene el auto inmóvil en relación con las marcas principales en el banco. Por el número de revoluciones del tacómetro está determinado por el caudal.


Además, en uno de los puntos de entrada al agua, el ancho del río está determinado por la cuadrícula del periscopio PIR-451 o el dispositivo DSP-30. Cuando se encuentran minas en el agua, según la situación, se busca o se desminera una nueva sección. El desminado se lleva a cabo solo después de la remoción de la máquina a la orilla. Los resultados de la exploración de una barrera de agua se registran en forma de una tarjeta de inteligencia de ingeniería, cuya base es el perfil de la sección transversal principal del cruce. El uso de IRM permite reducir el tiempo de exploración de las barreras de agua en los tiempos 1,5-2.

IRM-2 "Beetle" en un pedestal en el punto de control de la antigua escuela de ingeniería militar Kamenets-Podolsk
Características tácticas y técnicas del IRM-2 "Beetle".
tripulación, hombre - 6 (de los cuales 3 sapper)
masa, t - 17,5
longitud, m - 8,32
ancho, m - 3,15
altura, m - 2,42
espacio libre, mm - 420
Presión en el suelo, kg / cm2 - 0,69
Velocidad máxima, km / h - 55 (a flote - 10)
reserva de marcha, km - hasta 550
Armadura antibalas, acero - la frente del casco - 20 mm, el techo de la torre y el casco - según 3 mm
armamento / municiones - ametralladora PKN 7,62-mm, cartuchos de ametralladora 1 000, granadas de mano 10 F-1, 15 kg BB
Al final de unas fotos:







Fuentes:
Ingeniería de la máquina de reconocimiento. QUE y IE. - M .: Editorial Militar, 1990.
Guía de las partes materiales y operación de ingeniería de reconocimiento submarino IPR. - M .: Editorial Militar, 1972.
Karpenko A. Una revisión de vehículos blindados domésticos (1905 - 1995) - San Petersburgo, 1996.
Armas de ingeniería de vehículos: En piezas 4. Parte de 3. Máquinas para llevar a cabo el reconocimiento de ingeniería, la superación y la instalación de minas: barreras explosivas que proporcionan agua a las tropas / Ed. Cand. Ciencias Militares Teniente Coronel G. V. Kretinina. - M .: Editorial Militar, 1987.
El nacimiento de los anfibios: los recuerdos de los trabajadores de la planta de construcción de automóviles Krukovka. - Kremenchug: OJSC Kryukovsky Carriage Works, 2011.
Sokolov A. Ingeniería de la máquina de reconocimiento IRM // Conocimiento militar. - 1993. - No. 11.
IRM - Engineering Intelligence Machine - http://engineering-machine.ru/mir/32-irm-inzhenernaya-razvedyvatelnaya-mashina.html
IPR - Engineering Underwater Scout - http://engineering-machine.ru/mir/33-ipr-inzhenernyy-podvodnyy-razvedchik.html
http://war-arms.info/bronetechnika/bronemashini/boevie-razvedivatelnie-mashini/inzhenernaya-razvedivatelnaya-mashina-irm-sssr.html
Ingeniería del vehículo de reconocimiento IRM "Beetle" - http: //xn--80aa2bkafhg.xn--p1ai/article.php? Nid = 3216
IPR - Ingeniería soviética de reconocimiento submarino. - http://cris9.armforc.ru/isv_ipr.htm
http://pravoslav-voin.info/main/5176-ipr-inzhenernyj-podvodnyj-razvedchik.html
IPR - tanto en tierra como bajo el agua - https://topwar.ru/23678-ipr-i-po-zemle-i-pod-vodoy.html
información