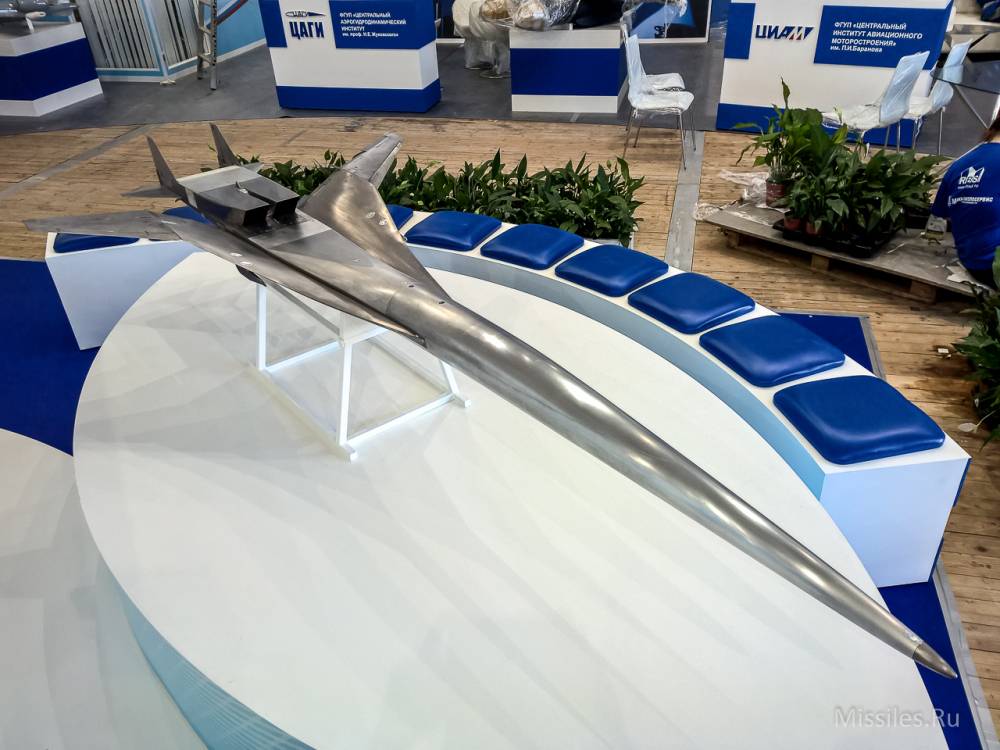
Vehículo aéreo no tripulado hipersónico multimodo "Hammer"

Actualmente, NPO Molniya, en el tema del trabajo de investigación y desarrollo, Molot está desarrollando un vehículo aéreo no tripulado hipersónico multimodo. Este UAV es considerado como un prototipo de demostrador de la tecnología de una hélice no tripulada hipersónica con una planta de energía turbo-ramjet combinada. La tecnología clave del prototipo es el uso de un motor ramjet (ramjet) con una cámara de combustión subsónica y un dispositivo de admisión de pantalla.
Parámetros calculados y experimentales del prototipo demostrador:
Números de crucero Mach M = 1.8 ... 4
- alturas de vuelo desde pequeñas a Н = 20 000 m,
- Peso de vuelo hasta 530 kg.
- arranque en tierra con un lanzador, usando un acelerador de combustible sólido.

La historia de este SRW fue un proyecto de un vehículo aéreo no tripulado supersónico multimodo (MSBLA) desarrollado por NPO Molniya, que determinó la forma aerodinámica de un prometedor acelerador no tripulado o tripulado. La tecnología clave de MSBLA es el uso de un motor ramjet (ramjet) con una cámara de combustión subsónica y un dispositivo de admisión de pantalla. Parámetros de diseño de MSBLA: números de crucero de Mach M = 1.8 ... 4, altitud de vuelo de baja a H ≈ 20 000 m, peso inicial hasta kg de 1000.
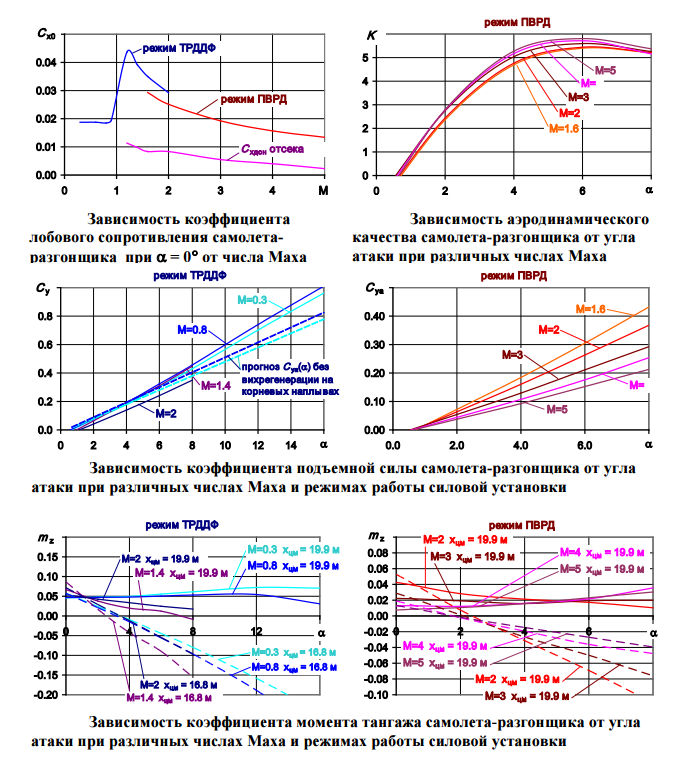
El diseño de la toma de aire investigado en el stand de TsAGI del SVS-2 mostró una baja eficiencia de la pantalla de cuña ventral aplicada hecha "al mismo tiempo" con el fuselaje (Fig. A) y una pantalla rectangular con un tramo igual al ancho del fuselaje (Fig. B).

Ambos proporcionaron una constancia aproximada de los coeficientes para la restauración de la presión total ν y el caudal f en el ángulo de ataque en lugar de aumentarlos.
Dado que la pantalla frontal del tipo utilizado en el cohete X-90 no se ajustaba para el MSBLA como prototipo del plano de aceleración, se decidió sobre la base de estudios experimentales de TsAGI de los primeros 80 para desarrollar la pantalla ventral, manteniendo la configuración con un cuerpo central de dos etapas obtenido por resultados de la prueba.
Durante las dos etapas de la investigación experimental en el banco de pruebas especial CBC-2 de TsAGI, 2008 de diciembre - 2009 de febrero y 2010 de marzo, con una etapa intermedia de estudios de búsqueda numérica, se desarrolló un dispositivo de admisión de aire (EVF) en pantalla con un cuerpo cónico de dos etapas con diferentes números calculados Los pasos de Mach, que nos permitieron obtener un empuje aceptable en una amplia gama de números de Mach.

El efecto de la pantalla consiste en un aumento del caudal y los coeficientes de recuperación con un aumento del ángulo de ataque en los números de Mach M> 2.5. La magnitud del gradiente positivo de ambas características aumenta al aumentar el número de Mach.

El EVZU se desarrolló y aplicó por primera vez en el avión experimental hipersónico X-90 desarrollado por Raduga (un misil de crucero, según la clasificación de la OTAN AS-19 Koala)

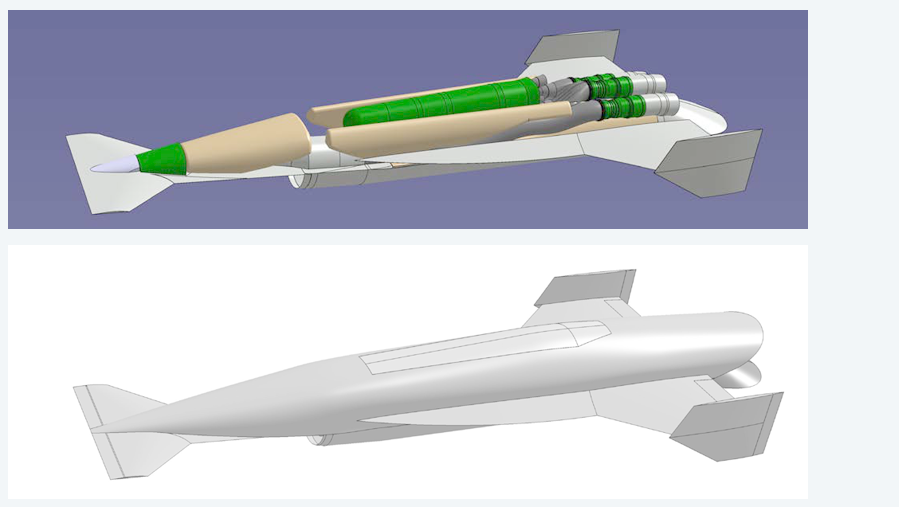
Como resultado, la configuración aerodinámica del prototipo se desarrolló de acuerdo con el esquema "híbrido" llamado por los autores, con la integración de la ESU en el sistema portador.
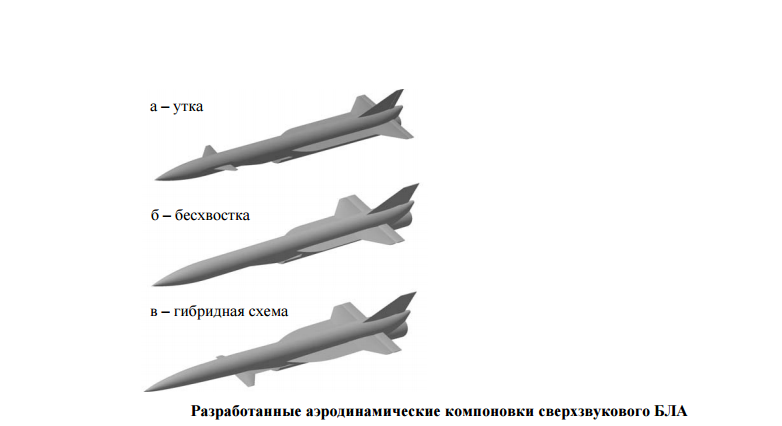
El esquema híbrido tiene características tanto de un esquema de "pato" (por el número y ubicación de las superficies de apoyo) como de un esquema sin cola (por el tipo de órganos de control longitudinales). Una trayectoria típica de MSBLA incluye el lanzamiento desde un lanzador con base en tierra, la aceleración mediante un acelerador de combustible sólido hasta la velocidad de lanzamiento del ramjet supersónico, un vuelo según un programa predeterminado con un segmento horizontal y el frenado a una velocidad subsónica baja con un aterrizaje suave en un paracaídas.
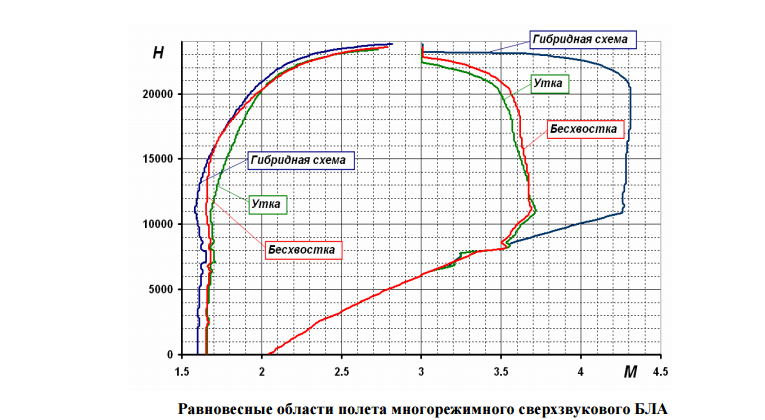
Se puede ver que el diseño híbrido se debe al efecto de pantalla más grande y la optimización del diseño aerodinámico bajo el arrastre mínimo cuando α = 1.2 ° ... 1.4 ° realiza un número máximo de Mach de vuelo M ≈ 4.3 en un rango de altura amplio H = 11 ... 21 km. Los esquemas “pato” y “sin cola” alcanzan el valor máximo del número M = 3.72 ... 3.74 en la altura H = 11 km. Al mismo tiempo, el esquema híbrido tiene una pequeña ganancia debido al cambio del mínimo de resistencia y en números de Mach bajos, con un rango de números de vuelo M = 11 ... 1.6 a la altura H 4.25 km. La región de vuelo de equilibrio más pequeña se realiza en el esquema "pato".
La tabla muestra los datos técnicos de vuelo calculados en los diseños desarrollados para las rutas de vuelo típicas.
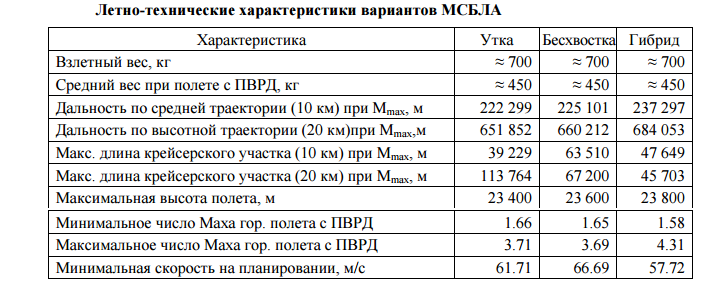
Las distancias de vuelo, que tienen el mismo nivel para todas las variantes de MSBLA, mostraron la posibilidad de crear con éxito un esparcidor con una reserva relativa ligeramente mayor de combustible de queroseno con rangos de vuelo supersónicos del orden de 1500 - 2000 km para regresar al campo de aviación local. Al mismo tiempo, el diseño híbrido desarrollado, que es una consecuencia de la integración profunda del esquema aerodinámico y el dispositivo de admisión de pantalla de un motor de inyección, tenía una clara ventaja en los límites de velocidad de vuelo y el rango de altitud en el que se realizan los límites de velocidad. Los valores absolutos de número de Mach y altitud de vuelo, alcanzando Mmax = 4.3 en Hmax Mmax = 20 500 m, sugieren la viabilidad de los sistemas aeroespaciales reutilizables existentes en Rusia con un esparcidor de gran altura hipersónico, que proporciona peso y, en consecuencia, reducción de costos espacio disponible en 6 - 8 veces en comparación con comenzar desde el suelo.
Este diseño aerodinámico fue la opción final para considerar una aeronave no tripulada multimodo reutilizable con altas velocidades de vuelo supersónicas.
Concepto y diseño general.
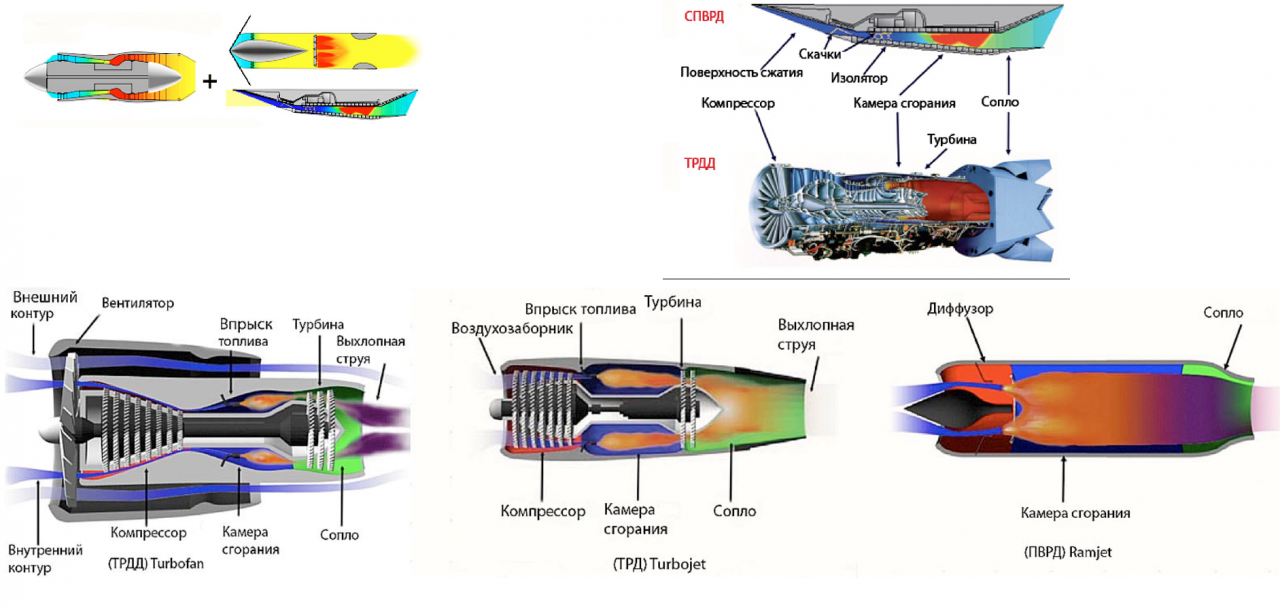
Un requisito distintivo para un avión con overclocking, en comparación con su prototipo de pequeño tamaño, es el despegue / aterrizaje en un avión desde los aeródromos existentes y la necesidad de volar a números de Mach menores que el número de Mach de un lanzamiento de ramjet M <1.8 ... 2. Esto determina el tipo y composición de la planta de energía combinada de la aeronave - un estatorreactor y motores turborreactores de postcombustión (TRDF).
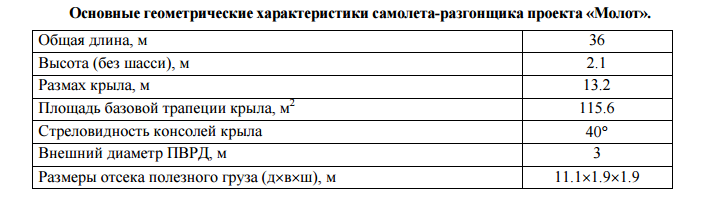
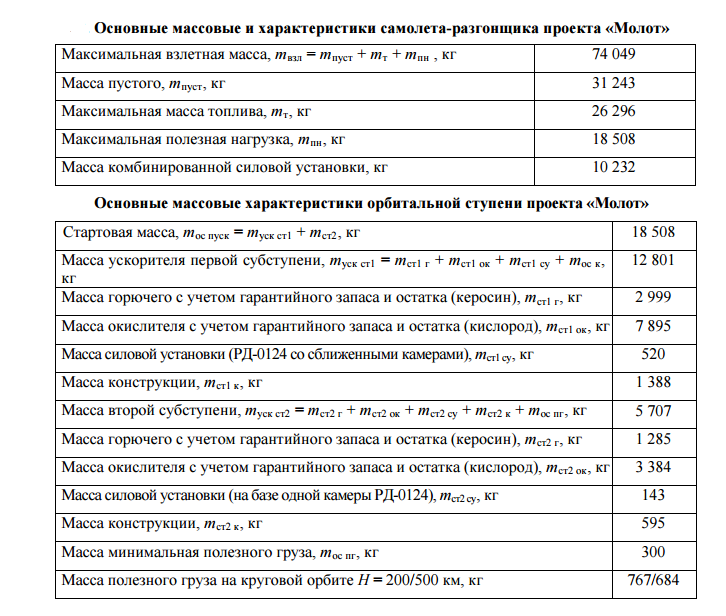
Sobre la base de esto, se formó la disposición técnica y la disposición general de la aeronave dispersora para un sistema de espacio de transporte de clase liviana con una carga útil de diseño del orden de 1000 kg a una órbita cercana a la Tierra 200 km. Los parámetros de peso de la etapa orbital de dos etapas se estimaron con base en el motor de queroseno de oxígeno RD-0124 utilizando el método de velocidad característica con pérdidas integrales, en función de las condiciones de arranque del acelerador.

En la primera etapa, se instala un motor RD-0124 (30 000 hueco empuje, kg, impulso específico 359 с), pero con un diámetro de cuadro reducido y cámaras muy separadas, o un motor RD-0124М (se diferencia de la base por una sola cámara y una nueva boquilla de un diámetro mayor); en la segunda etapa, el motor con una sola cámara del RD-0124 (empuje de vacío adoptado 7 500 kg). Basado en el resumen de peso obtenido de la etapa orbital con el peso total de 18 508 kg, se desarrolló su configuración y en base a la disposición del avión hipersónico de aceleración para el peso de despegue de 74 000 kg con una central eléctrica combinada (CSU).
LCP incluye:
• motor ramjet con un prototipo similar de ESD, tipo y diseño de la cámara de combustión;
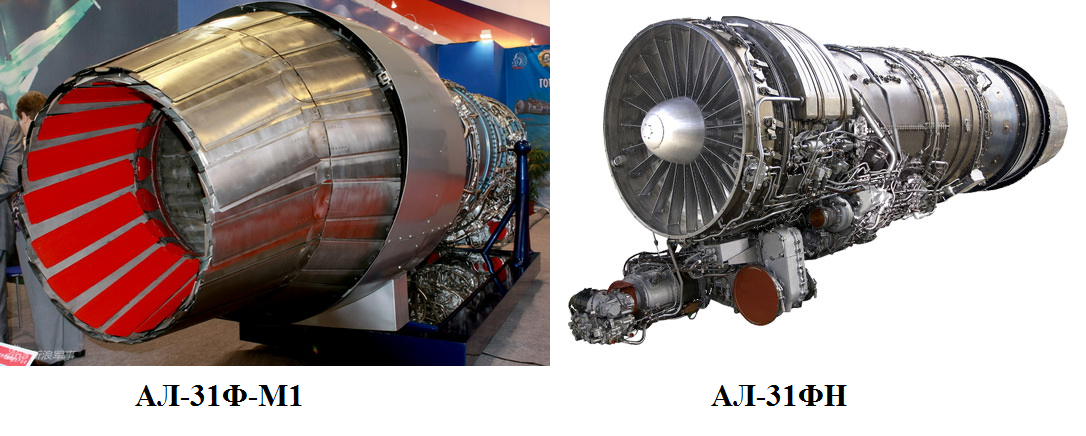
• Tres motores de poscombustión de dos circuitos turborreactores AL-31F М1
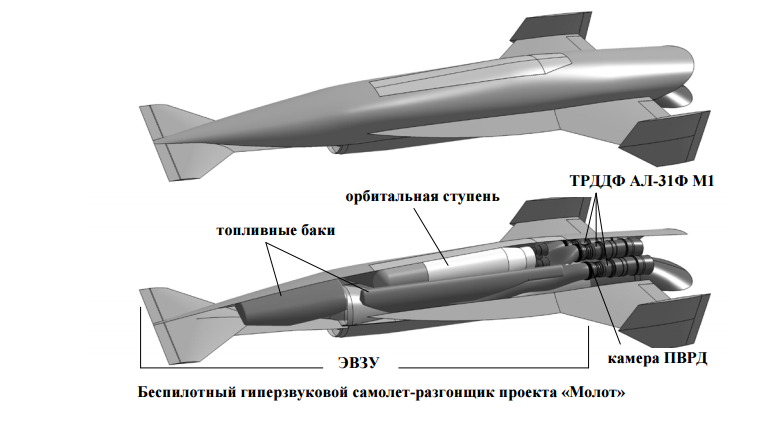
TRDF y el motor ramjet están dispuestos en un paquete vertical que le permite montar y mantener cada uno de ellos por separado. Para acomodar el ramjet con un ESD de tamaño máximo y, en consecuencia, empuje, se utilizó toda la longitud del vehículo. El peso máximo de despegue de la máquina 74 t. Peso en vacío - 31 t.
La sección muestra una etapa orbital: un PH líquido de dos etapas que pesa 18,5 toneladas, llevando el 1000 KL a la órbita terrestre baja 200 km. También se ven 3 TRDDF AL-31FM1.
Se supone que las pruebas experimentales de un ramjet de este tamaño se deben realizar directamente en las pruebas de vuelo, utilizando motores turbofan de overclocking. Al desarrollar un solo sistema de admisión de aire, se adoptaron los siguientes principios básicos:
• Mínimo de piezas móviles con cargas mínimas de potencia;
• Preservación total de la geometría teórica del dispositivo de memoria interna prototipo Ramjet.
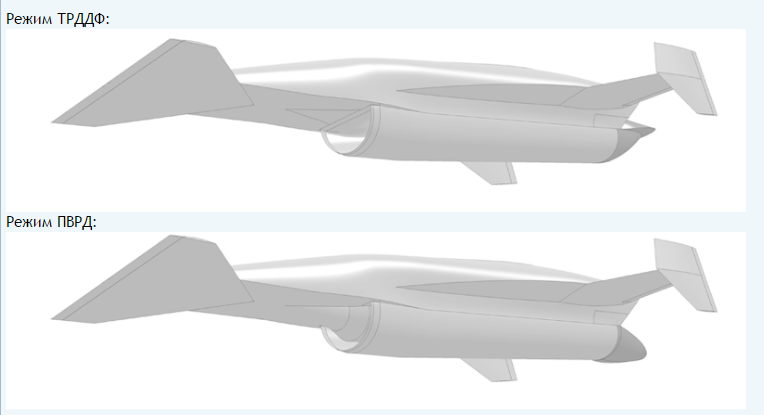
Implementado separando los conductos para TRDF y ramjet en la parte supersónica de la entrada de aire y desarrollando un dispositivo transformador fácil de usar que convierte la parte supersónica "hacia adelante y hacia atrás" del FEM a configuraciones no reguladas, cambiando simultáneamente el suministro de aire entre los canales. La ESD del aparato durante el despegue funciona en TRDDF; cuando la velocidad se establece en M = 2,0, cambia a un ramjet.
Detrás del dispositivo transformador EVZU hay un paquete horizontal, un compartimento de carga útil y depósitos de combustible principales. El uso de tanques suplementarios es necesario para el aislamiento térmico del diseño del fuselaje "caliente" y los tanques "fríos" con aislamiento térmico con queroseno. El compartimiento de la carga útil aloja el compartimiento TRDF, que tiene canales de flujo para enfriar las boquillas del motor, el diseño del compartimiento y la tapa superior de la boquilla del ramjet cuando el TRDF está en funcionamiento.
El principio de funcionamiento del transformador ESWU del plano de aceleración excluye, con una precisión a un valor pequeño, una reacción de fuerza a la parte móvil del dispositivo desde el lado del flujo incidente. Esto permite minimizar la masa relativa del sistema de admisión de aire al reducir la masa del propio dispositivo y su accionamiento en comparación con las entradas de aire rectangulares ajustables tradicionales. El motor ramjet tiene una boquilla de apilamiento fisionable que, cuando está cerrada en operación, asegura un flujo continuo de la corriente alrededor del fuselaje. Al abrir la boquilla del apilador en la transición al modo de operación de chorro de presión, la tapa superior cierra la parte inferior del compartimiento del motor del turbofán. La boquilla ramjet, cuando se abre, es un confusor supersónico y, con un cierto grado de subexpansión del chorro ramjet, que se realiza a un gran número de Mach, proporciona un aumento en el empuje debido a la proyección longitudinal de las fuerzas de presión en la tapa superior.
En comparación con el prototipo, el área relativa de las consolas de ala aumenta significativamente debido a la necesidad de despegue / aterrizaje de aeronaves. La mecanización del ala incluye solo elevones. Las quillas están equipadas con timones que se pueden usar como aletas de freno en el aterrizaje. Para garantizar la continuidad del flujo a velocidades de vuelo subsónicas, la pantalla tiene una punta desviable. El tren de aterrizaje de cuatro columnas del tren de aterrizaje se coloca a lo largo de los lados para evitar que la suciedad y los objetos extraños entren en la entrada de aire. Tal esquema se ha desarrollado en un producto EPOS, un análogo de un plano orbital, el sistema Spiral, que permite, como un chasis de bicicleta, realizar una sentadilla en el despegue.
Para determinar los pesos de vuelo, la posición del centro de masa y los momentos de inercia intrínsecos de la aeronave dispersora, se desarrolló un modelo de estado sólido simplificado en un entorno CAD.
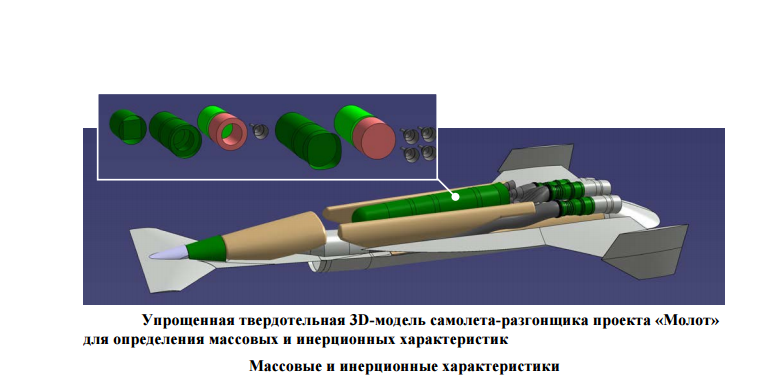
El diseño, la planta de energía y el equipo del plano de aceleración se dividieron en elementos 28, cada uno de los cuales se estimó mediante un parámetro estadístico (el peso específico de la piel anterior, etc.) y se simuló mediante un elemento de estado sólido geométricamente similar. Para el diseño del fuselaje y las superficies de apoyo, se utilizaron estadísticas ponderadas sobre los aviones MiG-25 / MiG-31. La masa del motor AL-31F M1 se toma "después del hecho". Diferentes porcentajes de vertido de queroseno fueron modelados por "moldes" de estado sólido truncado de las cavidades internas de los tanques de combustible.
También se desarrolló un modelo simplificado de estado sólido de la etapa orbital. Las masas de elementos estructurales se tomaron sobre la base de los datos de la unidad "I" (tercera etapa del vehículo de lanzamiento Soyuz-2 y el posible vehículo de lanzamiento Angara), destacando los componentes fijos y variables según la masa combustible
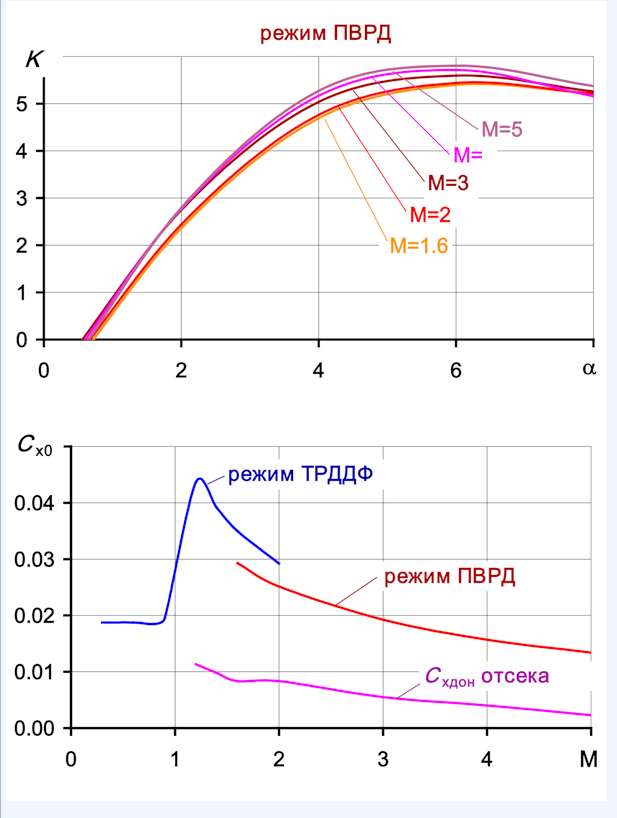
Algunas características de los resultados de la aerodinámica de la aeronave desarrollada:
En el plano del esparcidor, para aumentar el rango de vuelo, el modo de planificación se utiliza cuando se configura bajo un ramjet, pero sin suministrarle combustible. En este modo, se utiliza una boquilla-vaporizador, que reduce su solución al apagar el ramjet en el área del conducto, lo que asegura el flujo en el canal ESW, de manera que el empuje del difusor subsónico del canal sea igual a la resistencia de la boquilla:
Ddif ewm = hss ramjet. En pocas palabras, el principio de funcionamiento de un dispositivo de regulación se utiliza en las instalaciones para probar el OVC del tipo SHS-2 TsAGI. Un subensamblaje-boquilla-vapor abre la sección inferior del compartimiento TRDF, que comienza a crear su propia resistencia inferior, pero menor que la resistencia de un ramjet fuera de flujo con flujo supersónico en el canal OVC. En las pruebas de la EVZU en la instalación del SVS-2 TsAGI se demostró un funcionamiento estable de la admisión de aire con el número de Mach M = 1.3, por lo que se puede argumentar que el modo de planificación con la boquilla apiladora como un ESD en el 1.3 ≤ M ≤ Mmax es posible.
Características de vuelo y trayectoria de vuelo típica.
La tarea del avión esparcidor es lanzar un paso orbital desde la placa en vuelo, a la altitud, a la velocidad de vuelo y al ángulo de trayectoria, cumpliendo las condiciones para la masa máxima de la carga útil en la órbita de referencia. En la etapa preliminar de investigación sobre el proyecto Hammer, la tarea es alcanzar esta aeronave a la altitud máxima y la velocidad de vuelo cuando se utiliza la maniobra de "colina" para crear grandes valores de ángulo de trayectoria positiva en su rama ascendente. En este caso, se establece una condición para minimizar la altura de velocidad en la separación de la etapa para una reducción correspondiente en la masa del carenado y reducir las cargas en el compartimiento de carga útil en la posición abierta.
Los datos iniciales sobre el funcionamiento de los motores fueron las características económicas y de tracción del vuelo del AL-31F, corregidas a partir de los datos del banco AL-31F M1, así como las características del prototipo de ramjet escalado en proporción a la cámara de combustión y el ángulo de instalación de la pantalla.
En la fig. Se muestran las áreas de vuelo horizontal constante de un esparcidor hipersónico en varios modos de operación de una central eléctrica combinada.
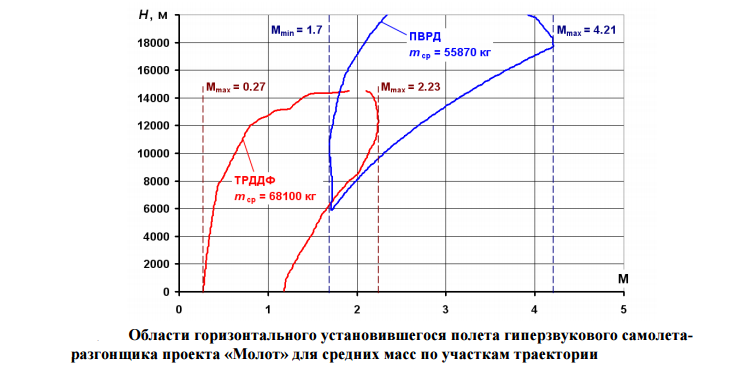
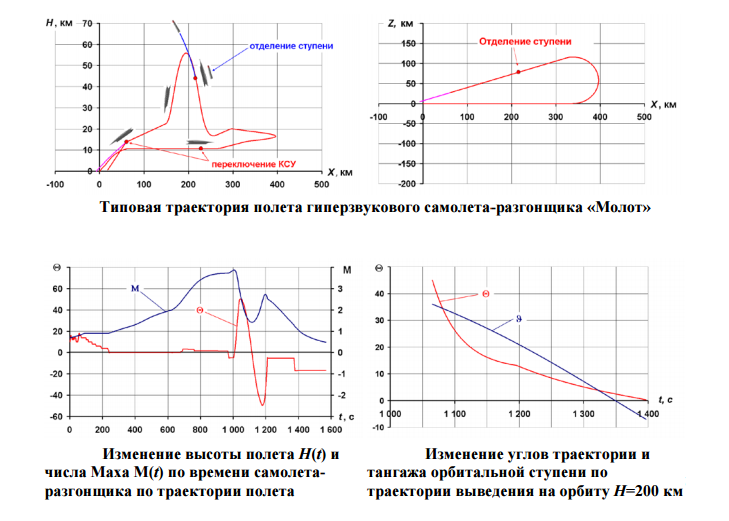
Cada zona se calcula para el promedio de la sección correspondiente del esparcidor del proyecto "Hammer" para las masas promedio sobre las secciones de la trayectoria de la masa de vuelo del dispositivo. Se puede ver que el proyectil alcanza el número máximo de Mach del vuelo M = 4.21; al volar en motores turborreactores, el número de Mach se limita a M = 2.23. Es importante tener en cuenta que el gráfico ilustra la necesidad de proporcionar al sistema de propulsión a chorro un amplio rango de números de Mach, que se logró y determinó experimentalmente durante el trabajo en el dispositivo de admisión de aire de pantalla del prototipo. El despegue se lleva a cabo a la velocidad de separación V = 360 m / s: las propiedades de apoyo del ala y la pantalla son suficientes sin el uso de la mecanización del despegue y el aterrizaje y el desplazamiento de las elevaciones. Después de un ascenso óptimo en la sección horizontal H = 10 700 m, el avión del proyectil pasa al supersónico Mach subsónico M = 0.9, cambiando el motor combinado en M = 2 y la aceleración preliminar a Vopt en M = 2.46. En el proceso de trepar en un ramjet, el avión esparcidor gira hacia el aeródromo local y alcanza la altura H0peak = 20 000 m con número de Mach M = 3.73.
A esta altitud, una maniobra dinámica comienza a alcanzar la altitud máxima de vuelo y el ángulo de trayectoria para lanzar la etapa orbital. Se realiza una inmersión suave con la aceleración a M = 3.9 y la maniobra de "deslizamiento" posterior. Los extremos del ramjet funcionan a la altura H ≈ 25000 m y la subida posterior se debe a la energía cinética del esparcidor. El lanzamiento de la etapa orbital tiene lugar en la rama ascendente de la trayectoria en la altura H disparador = 44 049 m con el número de Mach M = 2.05 y el ángulo de la trayectoria θ = 45 °. El esparcidor alcanza una altura de Hmáx = 55 871 m en la "colina". En la rama descendente de la trayectoria, cuando se alcanza el número de Mach M = 1.3, el ramjet → TRDF se cambia para eliminar la entrada de aire del ramjet.
En la configuración del TRDF, el esparcidor planea alcanzar la trayectoria de planeo, teniendo un suministro de combustible a bordo GGZT = 1000 kg.
En el modo normal, todo el vuelo desde el momento de la parada del ramjet antes del aterrizaje se produce sin el uso de motores con una reserva en el rango de planificación.
El cambio en los parámetros angulares del movimiento de paso se muestra en esta figura.
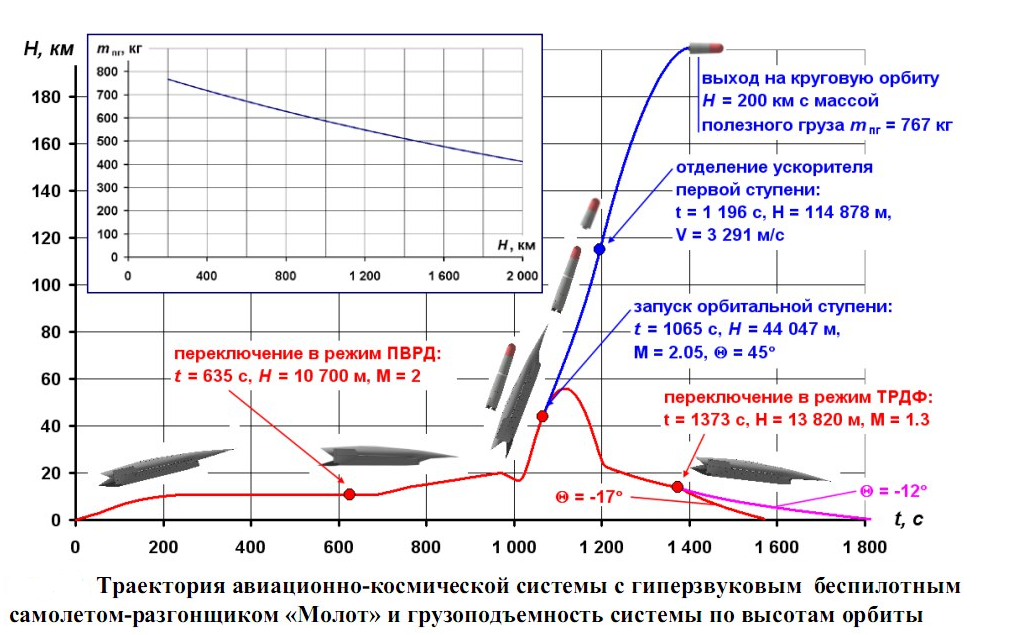
Cuando se coloca en una órbita circular H = 200 km a una altura H = 114 878 m a una velocidad de V = 3 291 m / s, el acelerador de la primera etapa secundaria se separa. La masa de la segunda etapa secundaria con una carga en órbita H = 200 km es 1504 kg, de los cuales la carga útil es mpg = 767 kg.
El patrón de aplicación y la trayectoria de vuelo de la aeronave hipersónica del proyecto Molot tiene una analogía con el proyecto “universitario” estadounidense RASCAL, que se está creando con el apoyo de la agencia gubernamental DARPA.
Una característica de los proyectos Molot y RASCAL es el uso de una maniobra dinámica del tipo "deslizamiento" con un acceso pasivo a grandes altitudes de lanzamiento de la etapa orbital Нpusk ≈ 50 m a baja velocidad alta, para el Molot, q lanzamiento = 000 kg / m24. La altitud de lanzamiento permite reducir las pérdidas gravitacionales y el tiempo de vuelo de una costosa etapa orbital desechable, es decir, su masa total. Los pequeños cabezales de lanzamiento de alta velocidad permiten minimizar la masa del carenado de carga útil o incluso rechazarla en algunos casos, lo que es esencial para los sistemas ultraligeros (mпгН2 <200 kg).
La principal ventaja del avión de refuerzo del proyecto Hammer sobre RASCAL es la ausencia de reservas de oxígeno líquido a bordo, lo que simplifica y reduce el costo de su operación y excluye la tecnología sin explotar. aviación Tanques criogénicos reutilizables. La relación empuje-peso en el modo de operación del motor ramjet permite que el propulsor Molot alcance en la rama ascendente del "deslizamiento" de los "trabajadores" para la etapa orbital de los ángulos de trayectoria θ lanzamiento ≈ 45 °, mientras que el acelerador RASCAL proporciona su etapa orbital con el ángulo de trayectoria inicial solo only lanzamiento ≈ 20 ° con posterioridad pérdidas debidas a la maniobra de cambio de escalón.
El sistema aeroespacial con la hélice no tripulada no tripulada de Hammer supera al sistema RASCAL en términos de capacidad de carga específica: (mphN500 / mvzl) martillo = 0.93%, (mpnn486 / mvzl) rascal = 0.25%.
Por lo tanto, la tecnología de un motor a reacción de flujo directo con una cámara de combustión subsónica (la "clave" del proyecto Hammer) desarrollada y dominada por la industria aeroespacial nacional supera la efectiva tecnología estadounidense MIPCC de inyección de oxígeno en el sistema de admisión de aire TRDF en términos de eficiencia en dispersores hipersónicos.
Un vehículo aéreo no tripulado hipersónico que pesa 74 000 kg realiza el despegue desde el aeródromo, acelera, asciende a lo largo de una trayectoria optimizada con un giro intermedio al punto de despegue a la altura H = 20 000 my M = 3.73, una dinámica dinámica de tipo deslizante con aceleración intermedia en el toldo bucear a M = 3.9. En la rama ascendente de la trayectoria, cuando H = 44 047 m, M = 2, se separa una etapa orbital de dos etapas con una masa 18 508 kg, diseñada sobre la base del motor RD-0124.
Después de pasar el “deslizamiento” Hmax = 55 871 m en el modo de planificación, el acelerador vuela al aeródromo, con un suministro garantizado de 1000 kg de combustible y un peso de aterrizaje de 36 579 kg. La etapa orbital pone en una órbita circular H = 200 km una carga útil de mpg en masa = 767 kg, en H = 500 km mbg = 686 kg.
Ayuda.
1. El laboratorio y la base de pruebas de NPO Molniya incluye los siguientes complejos de laboratorio:
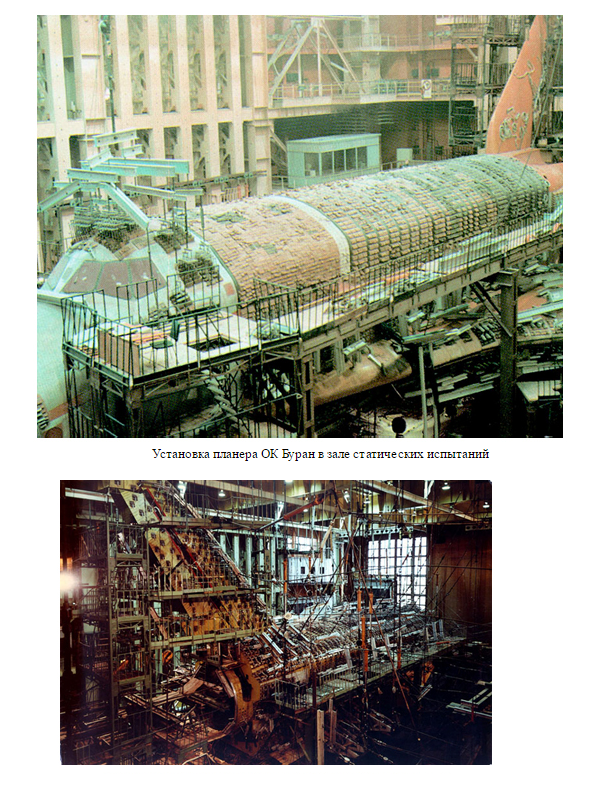
Laboratorio de ensayos de resistencia estática.
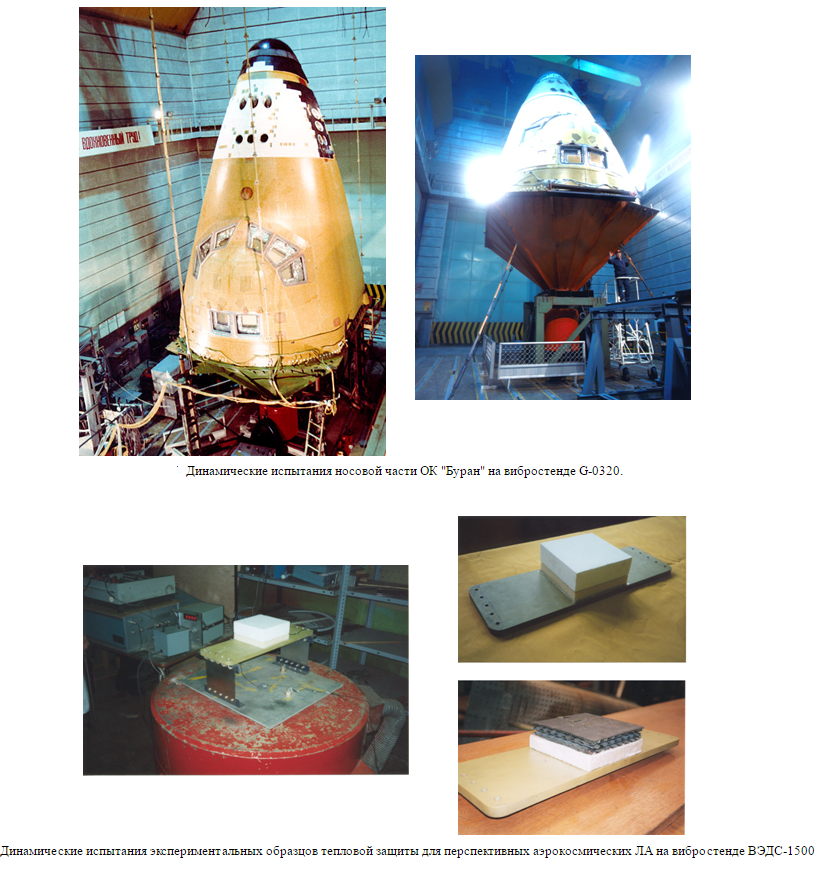
Pruebas dinámicas de laboratorio.
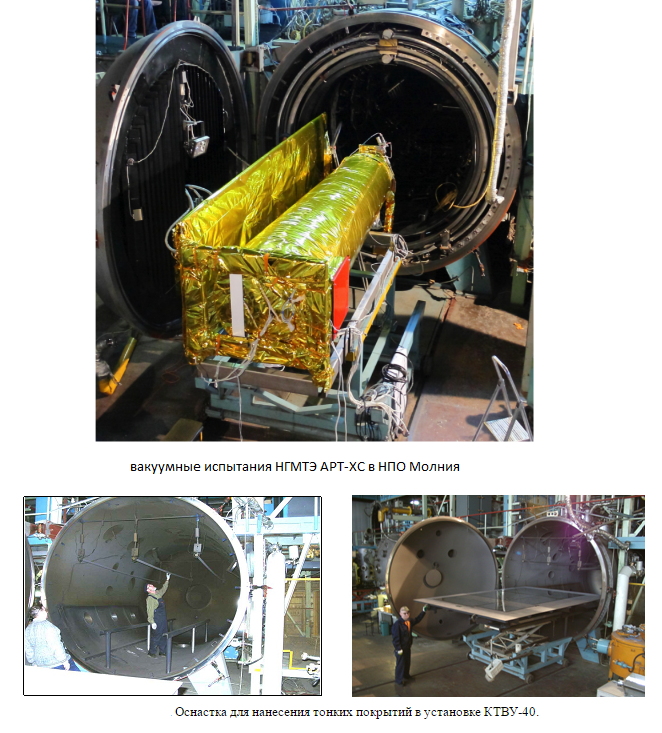
Laboratorio de pruebas de vacío Cryotherm
Laboratorio de pruebas de clima
Laboratorio de Ensayos Tribológicos.
2.A este es un proyecto de un avión civil de alta velocidad HEXAFLY-INT

Que es uno de los mayores proyectos de cooperación internacional. Involucra a las principales organizaciones europeas (ESA, ONERA, DLR, CIRA y otras), rusas (TsAGI, CIAM, LII, MIPT) y australianas (La Universidad de Sydney, etc.).

3. Rostec no permitió la quiebra de la compañía que desarrolló el transbordador espacial "Buran"
Nota: El modelo 3-D al principio del artículo no tiene nada que ver con el I + D de Hammer.
Trabajo basado en el artículo:
El proyecto "Hammer" de una hélice no tripulada hipersónica con una central de turbo-ramjet de pantalla combinada
/ Makeich G.S., Tyukaev M.Yu. (Instituto de Aviación de Moscú (Universidad Nacional de Investigación), Volokolamskoye Highway, 4, Moscú, A-80, GSP-3, 125993, Rusia), Chibisov Ya. N. (JSC Scientific Asociación de Producción "Lightning") /
Materiales usados, fotos y videos.
http://www.mai.ru/
http://www.ciam.ru/
http://www.npomolniya.ru/
http://en.avia.pro/
http://www.darpa.mil/
www.youtube.com de
http://otvaga2004.ru/
http://www.3dmir.ru/forum/read/5075.html
http://www.globalsecurity.org/
http://36on.ru/news/economics/64320-v-sovete-federatsii-proshli-dni-voronezhskoy-oblast
información