Controlador de dron electrónico AH-64D Apache Block III Nivel 4

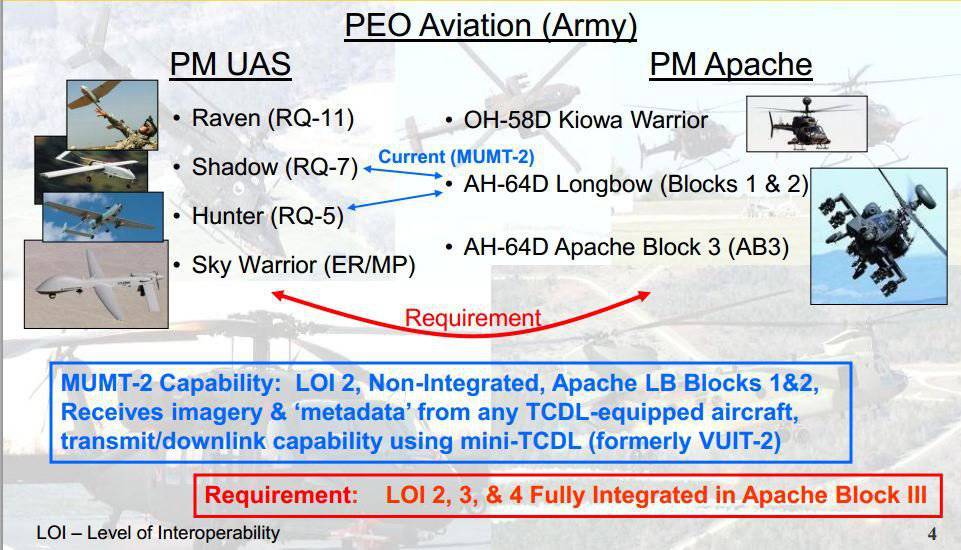
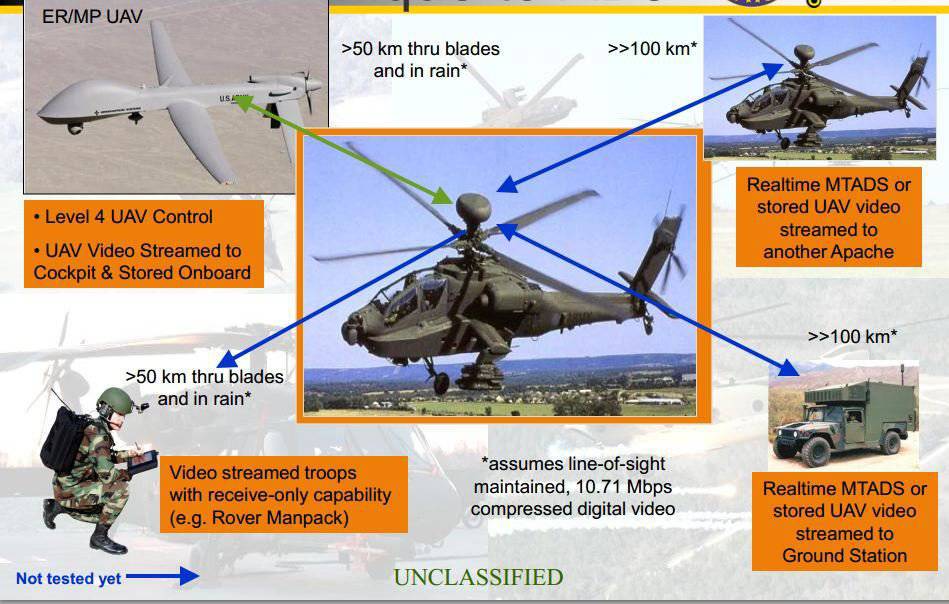
Boeing, el contratista general del Ejército de los EE. UU. Para el AH-64D Apache, está probando la próxima versión del helicóptero. La modificación permitirá la transmisión de un flujo de video en tiempo real y los metadatos que lo acompañan desde UAV como Hunter, Raven, Reaper y Shadow B a los helicópteros AH-64 Apache.

Se supone que todos los cambios se deben realizar en base a tecnologías probadas: OSRVT MUMT-2 y VUIT-2.
El nivel de compatibilidad LOI-4 le permite ver datos de video desde una cámara UAV, monitorear su carga útil y tener un cierto impacto en la trayectoria de vuelo UAV en ciertas situaciones.
La etapa final estimada es el nivel 5 (LOI-5), después de lo cual Apache tendrá el control total del UAV en todas las etapas del vuelo, incluido el despegue y el aterrizaje.
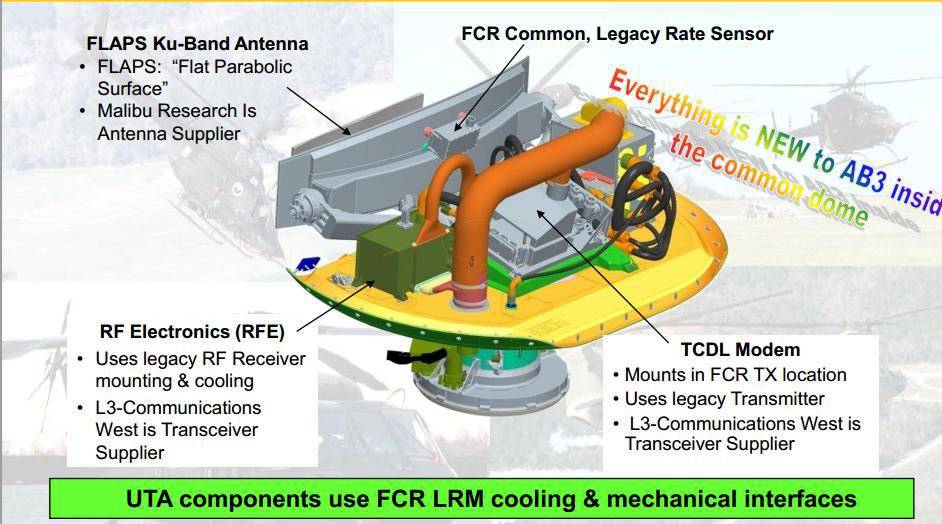
Las actualizaciones incluyen un procesador de radar de control de incendios (FCR) mejorado para detección de blancos, sistema de control de transferencia de datos tácticos (TCDL), sensor de condiciones meteorológicas (IMC), punto de control de UAV
El prototipo de la estación de control de vuelo UAV se probó en MD 530F durante las pruebas en Utah y las pruebas de campo en Afganistán.
Componentes MUMT-2 en helicóptero OH-58D - Kiowa, OSRVT de AAI Corp. al recibir video de pequeños vehículos aéreos no tripulados utilizando un enlace de datos digital (DDL) - Programas: GCSM-UGCS.

VUIT-2 se basa en una computadora de Quantum3D y una mini línea de datos táctica común (M-TADS)


AH-64D El Apache Block III L 4 no es el primer helicóptero estadounidense en una arquitectura de sistema abierto.
Ya existen los helicópteros CH-47F de carga y MH-47G para operaciones especiales Chinooks con un sistema de arquitectura común (CAAS), que se pueden combinar con el sistema Apache.
La capacidad del AH-64D Apache Block III Level 4 para controlar directamente el UAV y recibir datos en tiempo real amplía enormemente las capacidades del helicóptero en cuatro direcciones.
1. El acceso a un UAV (UAS) le permitirá al piloto ver más zonas en el campo de batalla de las que puede tener hoy. Los vehículos aéreos no tripulados operan a una altitud más alta que Apache y, como regla general, se colocan a cierta distancia del helicóptero. Por lo tanto, el piloto ve no solo el área alrededor de su posición, sino también la segunda posición alrededor del UAV, a una distancia considerable de su ubicación, llamada. multi vision
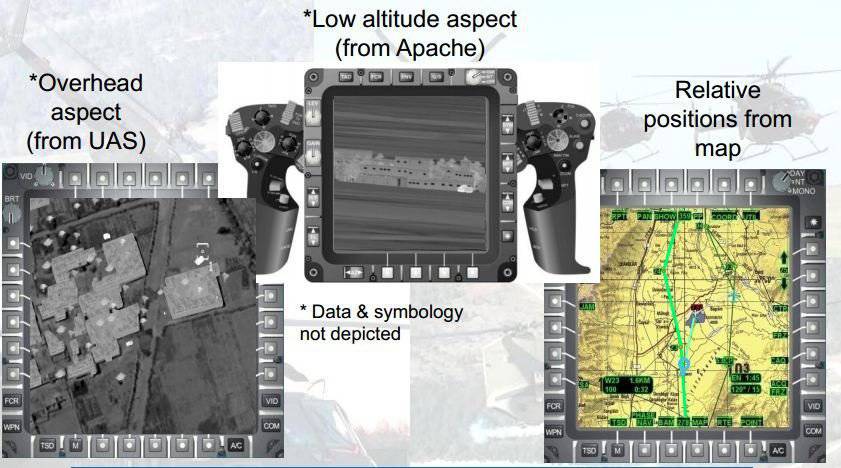
2.Piloto y operador armas Puede ver posibles amenazas y objetivos desde un ángulo diferente. Apache tiene un sistema de designación de objetivos actualizado (vista de designación (M-TADS)), ubicado en el módulo en la nariz del helicóptero. Esta torreta contiene una cámara de televisión y un sensor de infrarrojos con una selección de niveles de zoom, así como un láser para iluminar el objetivo.
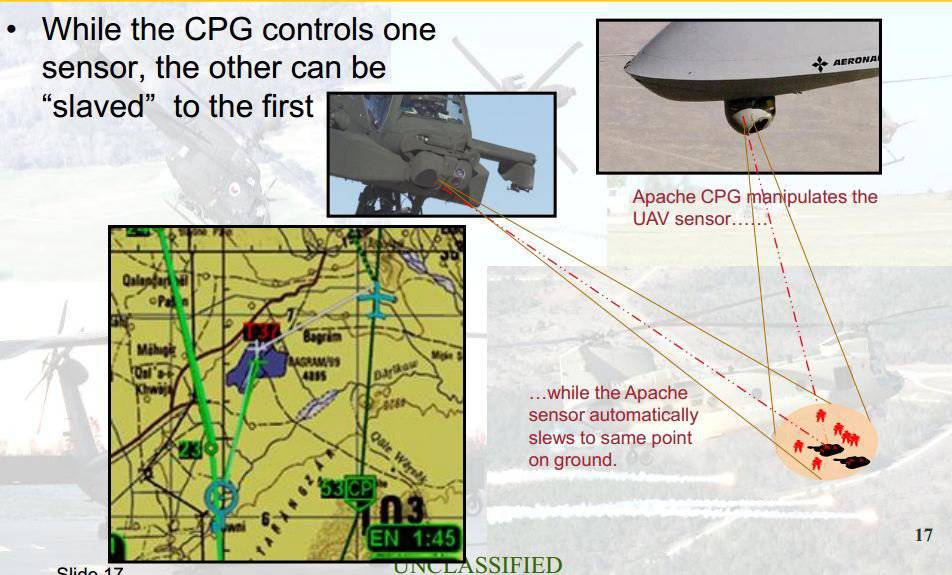
Usando TADS, Apache puede inspeccionar el campo de batalla, elegir un objetivo e iluminarlo con un láser para atacar. Pero si el objetivo está oculto detrás del terreno o el edificio, el piloto o el artillero no lo ven, ni pueden evaluar la amenaza desde el objetivo. Sin embargo, al enviar el UAV a lo largo de la trayectoria (ruta), que permite ver al objetivo detrás del obstáculo, parece que "transfiere" sus sensores al otro lado, mientras permanece en su lugar. Luego, al acceder al canal de video de las cámaras UAV, el piloto y el artillero ahora pueden ver qué objetivos y amenazas están ocultos, y todo sucede en tiempo real.
3. Muchos de los vehículos aéreos no tripulados tienen un láser DL (iluminación de objetivo). Sus sistemas láser DG son totalmente compatibles con los sistemas de propulsión de cohetes de helicópteros de combate. El helicóptero Apache aprovecha esta oportunidad para atacar a los objetivos de forma remota, utilizando la designación de objetivo de los UAV, mientras permanece oculto para ellos, no cae bajo las armas de la defensa aérea ni el fuego de infantería que cubre al objetivo.

El objetivo de sus misiles Hellfire se produce a través de un centro de datos láser desde un UAV transmitido a través de un canal de metadatos. Los datos del sensor, la iluminación y la ubicación del objetivo se transfieren automáticamente entre los UAV (UAS) y Apache, sincronizados en el tiempo y la ubicación geográfica: helicóptero, UAV, AIM, los ajustes se realizan de acuerdo con las condiciones de la zona de lanzamiento y la zona de destino. El inicio está en progreso. El UAV puede evaluar el resultado del ataque y si hay un error, es casi instantáneamente posible repetir el golpe.
4. Apache podrá recibir una imagen de video de un UAV y enviarla a otros elementos de la plataforma que participan en el ataque del objetivo: a otro Apache, infantería, UAV o se transferirá a la estructura de comando.

Los componentes del equipo de prueba se llevaron a cabo en condiciones reales del desierto y las zonas montañosas (Utah, Afganistán), luego, para evaluar el impacto de las tormentas de bala y las temperaturas máximas.
información