Sistemas de navegación por satélite de la URSS, Rusia y Estados Unidos. Segunda historia
Octubre 4 1957 del año fue un incentivo importante para los Estados Unidos: los ingenieros estadounidenses después del lanzamiento del primer satélite artificial de la Tierra en la URSS decidieron adaptar el espacio para satisfacer las necesidades de navegación (con el sentido práctico típico de Yankan). En el Laboratorio de Física Aplicada en Johns Hopkins АPL (Laboratorio de Física Aplicada), el personal de W. G. Guyer y J. C. Wiffenbach estudiaron la señal de radio del “Sputnik-1” soviético y notaron un fuerte cambio de frecuencia Doppler de la señal emitida por el satélite que pasa. Cuando nuestro primogénito en el espacio se acercó, la frecuencia de la señal aumentó, y el retroceso emitió señales de radio de frecuencia decreciente. Los investigadores lograron desarrollar un programa de computadora para determinar los parámetros de la órbita de un objeto que pasa en su señal de radio en una sola pasada. Naturalmente, el principio inverso también es posible: el cálculo de los parámetros ya conocidos de la órbita utilizando el mismo desplazamiento de frecuencia de las coordenadas desconocidas del dispositivo receptor de tierra. Este pensamiento vino a la mente en el empleado de APL F.T. McClure, y él, junto con el director de laboratorio Richard Kershner, formaron un grupo de investigadores para trabajar en un proyecto llamado Transit.

Richard Kershner (izquierda) es uno de los padres fundadores del sistema de posicionamiento global de los Estados Unidos. Fuente: gpsworld.com

El submarino "George Washington" es el primer usuario del sistema de tránsito. Fuente: zonwar.ru
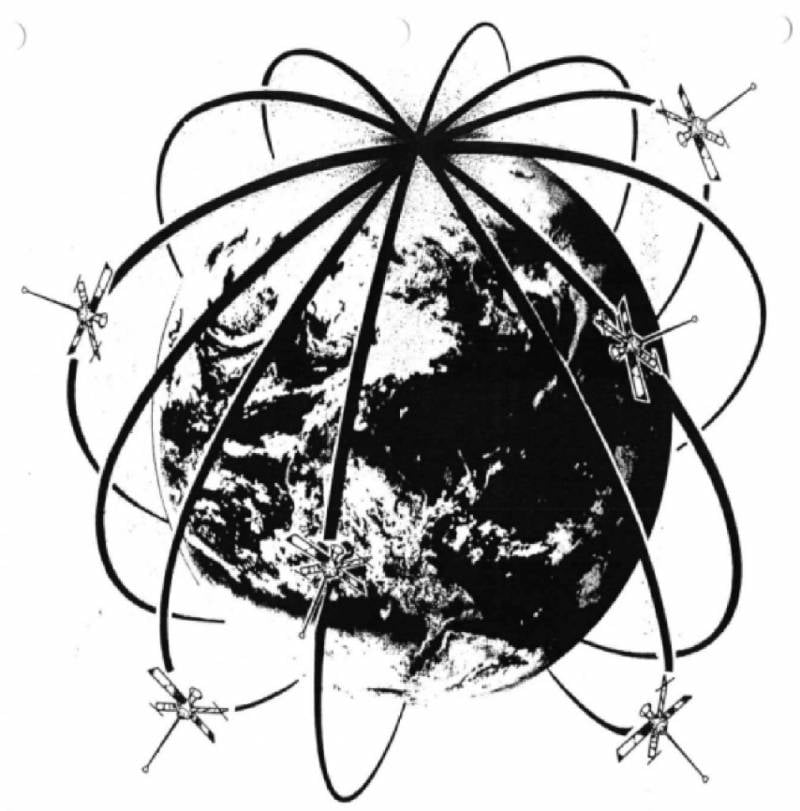
Órbitas operativas de la constelación de tránsito. Fuente: gpsworld.com
El principal cliente fue la Marina de los Estados Unidos, que necesitaba herramientas de navegación precisas para los nuevos submarinos equipados con misiles Polaris. La necesidad de determinar con precisión la ubicación de los submarinos del tipo "George Washington" era extremadamente necesaria para el lanzamiento de nuevos misiles con ojivas nucleares desde cualquier lugar en los océanos.


Equipos de recepción de tránsito para submarinos. Fuente: timeandnavigation.si.edu
Ya por 1958, los estadounidenses pudieron presentar el primer modelo experimental del sistema de satélites Transit y 17 de septiembre 1959, fue enviado al espacio. También se creó la infraestructura terrestre: en el momento del lanzamiento, el complejo de equipos de navegación para el consumidor estaba listo, así como las estaciones de rastreo terrestre.

Ingenieros de la Universidad de Hopkins para ensamblar y probar la nave espacial Transit. Fuente: timeandnavigation.si.edu
Los estadounidenses estaban trabajando en un proyecto completo de navegación por satélite con dispositivo de poscombustión: para el año 1959 construyeron hasta cinco tipos de satélites de Tránsito, que más tarde se lanzaron y probaron. En el modo operativo, el sistema de navegación estadounidense obtuvo 1963 en diciembre, es decir, en menos de cinco años, fue posible crear un sistema funcional que tenga una buena precisión para su tiempo: el error cuadrado medio (UPC) para un objeto fijo fue 60 m.

Satellite Transit 5A modelo 1970 del año. Fuente: timeandnavigation.si.edu

Receptor de tránsito instalado en el automóvil, utilizado por el geólogo Smithsonian University Ted Maxwell en el desierto egipcio en el año 1987. El caballo de batalla del investigador fue ...

... "Niva soviética"! Fuente: gpsworld.com [/ center]
Determinar las coordenadas de un submarino que se movía en la posición de la superficie fue más problemático: si comete un error con el valor de velocidad en 0,5 km / h, el UPC aumentará a 500 m. Por lo tanto, fue más conveniente contactar al satélite para obtener ayuda en la posición fija del barco, lo que tampoco fue fácil. La órbita de la Marina de los EE. UU. De baja órbita (1100 km de altitud) recibió cuatro satélites en medio de 64, lo que llevó a la constelación orbital a siete vehículos, y desde 67, la navegación estuvo disponible y fue simplemente mortal. Actualmente, la constelación de satélites Transit se utiliza para estudiar la ionosfera. La incapacidad del primer sistema de navegación por satélite en el mundo fue la incapacidad de determinar la altura de la posición del usuario en tierra, la duración considerable de la observación y la precisión de posicionamiento del objeto, que se hizo insuficiente en el tiempo. Todo esto ha llevado a nuevas búsquedas en la industria espacial estadounidense.
Nave espacial de la época. Fuente: timeandnavigation.si.edu
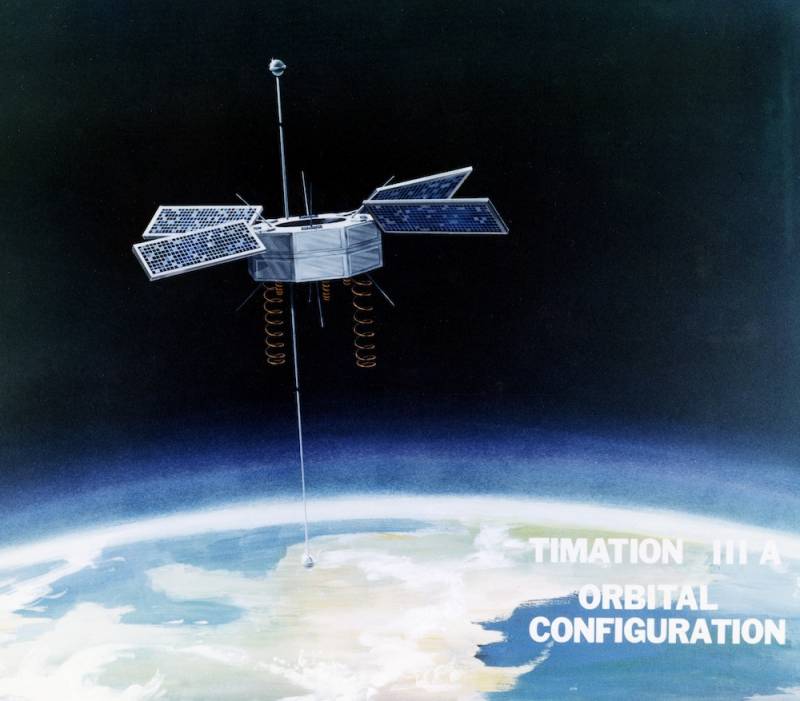
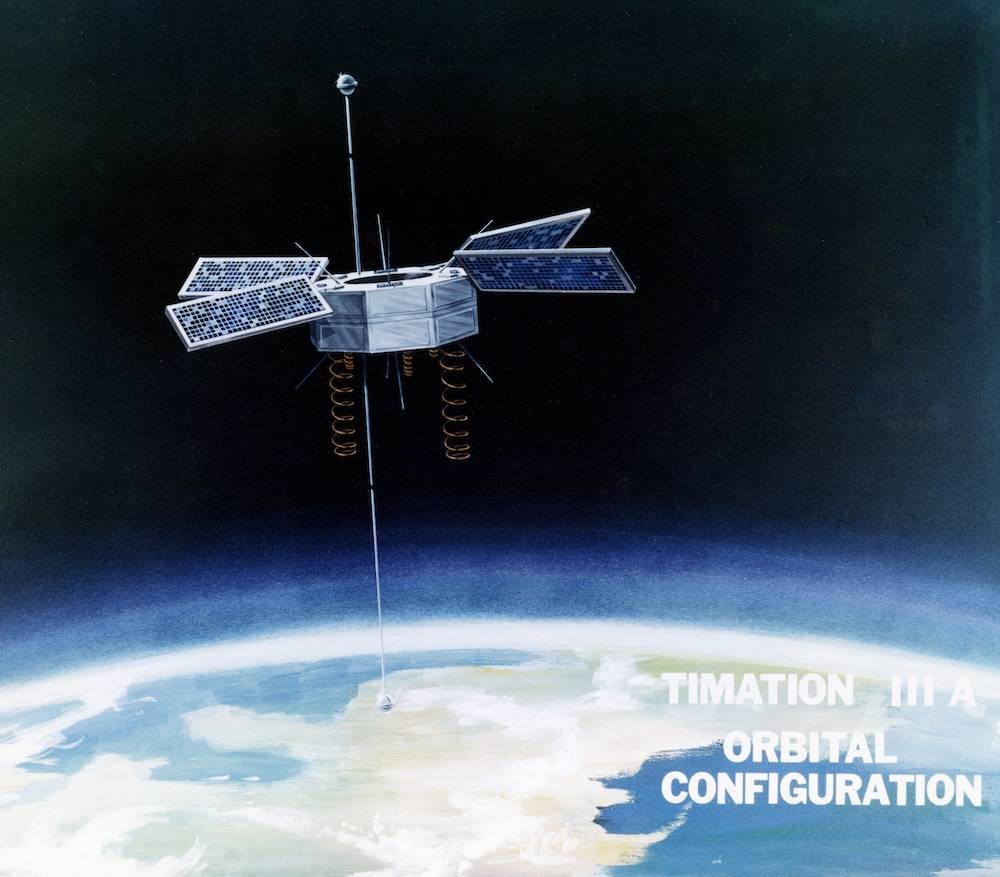
El segundo sistema de navegación por satélite fue Timation, del Laboratorio de Investigación Naval (NRL - Laboratorio de Investigación Naval), dirigido por Roger Easton. Dentro del proyecto, se ensamblaron dos satélites, equipados con relojes ultra precisos para transmitir señales de tiempo a consumidores en tierra y determinar con precisión su propia ubicación.
Temporización de satélite experimental NTS-3, equipada con un reloj de rubidio. Fuente: gpsworld.com
En Timation, se formuló un principio básico para la operación de futuros sistemas de GPS: un transmisor operado en el satélite, que emitía una señal codificada, que fue fijada por el suscriptor de tierra y midió el retraso en su paso. Al conocer la ubicación exacta del satélite en órbita, el equipo calculó fácilmente la distancia y, a partir de estos datos, determinó sus propias coordenadas (efemérides). Por supuesto, esto requiere al menos tres satélites, y preferiblemente cuatro. Las primeras Timaciones se lanzaron al espacio en el año 1967 y al principio llevaron un reloj de cuarzo y, más tarde, un reloj atómico ultra preciso, rubidio y cesio.
La Fuerza Aérea de los Estados Unidos, independientemente de la Armada, operaba en su propio sistema de posicionamiento global, llamado Sistema 621B (Fuerza Aérea 621B). Una innovación importante de esta tecnología fue la tridimensionalidad: ahora es posible determinar la latitud, la longitud y la altura esperada del objeto. Las señales de satélite se separaron de acuerdo con un nuevo principio de codificación basado en una señal de ruido pseudoaleatorio. El código pseudoaleatorio aumenta la inmunidad al ruido de la señal y resuelve el problema de la restricción de acceso. Los usuarios civiles de equipos de navegación solo tienen acceso a códigos abiertos que pueden modificarse desde el centro de control en tierra en cualquier momento. En este caso, toda la técnica "pacífica" fallará, determinando sus propias coordenadas con un error significativo. Los códigos militares cerrados permanecerán sin cambios.
Las pruebas se lanzaron en 1972 en el sitio en Nuevo México, utilizando transmisores en globos y aviones como simuladores de satélites. El sistema 612® mostró una excelente precisión de posicionamiento de varios metros, y fue en ese momento que se formó el concepto de un sistema de navegación global de órbita media con satélites 16. En esta realización, un grupo de cuatro satélites (este número es necesario para una navegación precisa) proporcionó cobertura de 24-hour de todo el continente. Durante un par de años, el sistema 612B estuvo en el rango de los experimentales y no estaba particularmente interesado en el Pentágono. Al mismo tiempo, varias oficinas en los EE. UU. Estaban trabajando en un tema de navegación "candente": el laboratorio de física aplicada trabajó en la modificación de Tránsito, la Timación dopada de la Armada e incluso las fuerzas terrestres ofrecieron su propio SECOR (Correlación secuencial del rango, cálculo del rango secuencial). Esto no podía menos que molestar al Ministerio de Defensa, que corría el riesgo de encontrar formatos de navegación únicos en cada tipo de fuerza. En cierto momento, uno de los guerreros estadounidenses golpeó su mano sobre la mesa y nació el GPS, que absorbió todo lo mejor de sus predecesores. En medio de 70, bajo los auspicios del Departamento de Defensa de los Estados Unidos, se creó un comité conjunto tripartito llamado Navigation Satellite Executive Group (NAVSEG), que determinó los parámetros importantes del futuro sistema: el número de satélites, sus alturas, códigos de señales y métodos de modulación. Cuando llegamos a la cifra del costo, decidimos crear inmediatamente dos opciones: militar y comercial, con un error predeterminado en la precisión de posicionamiento. La Fuerza Aérea desempeñó un papel destacado en este programa, ya que su Fuerza Aérea 621B fue el modelo más reflexivo del futuro sistema de navegación, del cual el GPS tomó prestado la tecnología de ruido pseudoaleatorio casi sin cambios. El sistema de sincronización de señales se tomó del proyecto Timtation, pero la órbita se elevó a 20 miles de kilómetros, lo que proporcionó el período de circulación de 12-hora en lugar del 8-hora de su predecesor. Un satélite con experiencia se lanzó al espacio ya en 1978 y, como de costumbre, ya habían preparado toda la infraestructura de tierra necesaria: solo se inventaron siete tipos de equipos de recepción. En 1995, el GPS se implementó por completo: alrededor de los satélites 30 están constantemente en órbita, a pesar del hecho de que 24 es suficiente para funcionar. Se asignan seis planos orbitales para satélites, que tienen una inclinación en 550. En este momento, las aplicaciones de topografía GPS permiten determinar la posición del consumidor con una precisión de menos de un milímetro. Desde 1996, han aparecido los satélites Block 2R, equipados con el sistema de navegación autónomo AutoNav, que permite que el dispositivo funcione en órbita cuando la estación de control en tierra se destruye durante al menos 180 días.
El uso de GPS en el combate hasta el final del 80-x fue esporádico y poco importante: determinar las coordenadas de los campos minados en el Golfo Pérsico y eliminar la imperfección de los mapas durante la invasión de Panamá. El bautismo completo de fuego tuvo lugar en el Golfo Pérsico en 1990-1991 durante la Tormenta del Desierto. Las tropas pudieron maniobrar activamente en el desierto, donde es difícil encontrar puntos de referencia aceptables, así como llevar a cabo disparos de artillería con gran precisión en cualquier momento del día en condiciones de tormentas de arena. Más tarde, el GPS fue útil en una operación de mantenimiento de la paz en Somalia en 1993, en el aterrizaje de estadounidenses en Haití en 1994 y, finalmente, en las campañas afganas e iraquíes del siglo XXI.
Richard Kershner (izquierda) es uno de los padres fundadores del sistema de posicionamiento global de los Estados Unidos. Fuente: gpsworld.com

El submarino "George Washington" es el primer usuario del sistema de tránsito. Fuente: zonwar.ru
Órbitas operativas de la constelación de tránsito. Fuente: gpsworld.com
El principal cliente fue la Marina de los Estados Unidos, que necesitaba herramientas de navegación precisas para los nuevos submarinos equipados con misiles Polaris. La necesidad de determinar con precisión la ubicación de los submarinos del tipo "George Washington" era extremadamente necesaria para el lanzamiento de nuevos misiles con ojivas nucleares desde cualquier lugar en los océanos.
Equipos de recepción de tránsito para submarinos. Fuente: timeandnavigation.si.edu
Ya por 1958, los estadounidenses pudieron presentar el primer modelo experimental del sistema de satélites Transit y 17 de septiembre 1959, fue enviado al espacio. También se creó la infraestructura terrestre: en el momento del lanzamiento, el complejo de equipos de navegación para el consumidor estaba listo, así como las estaciones de rastreo terrestre.
Ingenieros de la Universidad de Hopkins para ensamblar y probar la nave espacial Transit. Fuente: timeandnavigation.si.edu
Los estadounidenses estaban trabajando en un proyecto completo de navegación por satélite con dispositivo de poscombustión: para el año 1959 construyeron hasta cinco tipos de satélites de Tránsito, que más tarde se lanzaron y probaron. En el modo operativo, el sistema de navegación estadounidense obtuvo 1963 en diciembre, es decir, en menos de cinco años, fue posible crear un sistema funcional que tenga una buena precisión para su tiempo: el error cuadrado medio (UPC) para un objeto fijo fue 60 m.
Satellite Transit 5A modelo 1970 del año. Fuente: timeandnavigation.si.edu

Receptor de tránsito instalado en el automóvil, utilizado por el geólogo Smithsonian University Ted Maxwell en el desierto egipcio en el año 1987. El caballo de batalla del investigador fue ...

... "Niva soviética"! Fuente: gpsworld.com [/ center]
Determinar las coordenadas de un submarino que se movía en la posición de la superficie fue más problemático: si comete un error con el valor de velocidad en 0,5 km / h, el UPC aumentará a 500 m. Por lo tanto, fue más conveniente contactar al satélite para obtener ayuda en la posición fija del barco, lo que tampoco fue fácil. La órbita de la Marina de los EE. UU. De baja órbita (1100 km de altitud) recibió cuatro satélites en medio de 64, lo que llevó a la constelación orbital a siete vehículos, y desde 67, la navegación estuvo disponible y fue simplemente mortal. Actualmente, la constelación de satélites Transit se utiliza para estudiar la ionosfera. La incapacidad del primer sistema de navegación por satélite en el mundo fue la incapacidad de determinar la altura de la posición del usuario en tierra, la duración considerable de la observación y la precisión de posicionamiento del objeto, que se hizo insuficiente en el tiempo. Todo esto ha llevado a nuevas búsquedas en la industria espacial estadounidense.
Nave espacial de la época. Fuente: timeandnavigation.si.edu
El segundo sistema de navegación por satélite fue Timation, del Laboratorio de Investigación Naval (NRL - Laboratorio de Investigación Naval), dirigido por Roger Easton. Dentro del proyecto, se ensamblaron dos satélites, equipados con relojes ultra precisos para transmitir señales de tiempo a consumidores en tierra y determinar con precisión su propia ubicación.
Temporización de satélite experimental NTS-3, equipada con un reloj de rubidio. Fuente: gpsworld.com
En Timation, se formuló un principio básico para la operación de futuros sistemas de GPS: un transmisor operado en el satélite, que emitía una señal codificada, que fue fijada por el suscriptor de tierra y midió el retraso en su paso. Al conocer la ubicación exacta del satélite en órbita, el equipo calculó fácilmente la distancia y, a partir de estos datos, determinó sus propias coordenadas (efemérides). Por supuesto, esto requiere al menos tres satélites, y preferiblemente cuatro. Las primeras Timaciones se lanzaron al espacio en el año 1967 y al principio llevaron un reloj de cuarzo y, más tarde, un reloj atómico ultra preciso, rubidio y cesio.
La Fuerza Aérea de los Estados Unidos, independientemente de la Armada, operaba en su propio sistema de posicionamiento global, llamado Sistema 621B (Fuerza Aérea 621B). Una innovación importante de esta tecnología fue la tridimensionalidad: ahora es posible determinar la latitud, la longitud y la altura esperada del objeto. Las señales de satélite se separaron de acuerdo con un nuevo principio de codificación basado en una señal de ruido pseudoaleatorio. El código pseudoaleatorio aumenta la inmunidad al ruido de la señal y resuelve el problema de la restricción de acceso. Los usuarios civiles de equipos de navegación solo tienen acceso a códigos abiertos que pueden modificarse desde el centro de control en tierra en cualquier momento. En este caso, toda la técnica "pacífica" fallará, determinando sus propias coordenadas con un error significativo. Los códigos militares cerrados permanecerán sin cambios.
Las pruebas se lanzaron en 1972 en el sitio en Nuevo México, utilizando transmisores en globos y aviones como simuladores de satélites. El sistema 612® mostró una excelente precisión de posicionamiento de varios metros, y fue en ese momento que se formó el concepto de un sistema de navegación global de órbita media con satélites 16. En esta realización, un grupo de cuatro satélites (este número es necesario para una navegación precisa) proporcionó cobertura de 24-hour de todo el continente. Durante un par de años, el sistema 612B estuvo en el rango de los experimentales y no estaba particularmente interesado en el Pentágono. Al mismo tiempo, varias oficinas en los EE. UU. Estaban trabajando en un tema de navegación "candente": el laboratorio de física aplicada trabajó en la modificación de Tránsito, la Timación dopada de la Armada e incluso las fuerzas terrestres ofrecieron su propio SECOR (Correlación secuencial del rango, cálculo del rango secuencial). Esto no podía menos que molestar al Ministerio de Defensa, que corría el riesgo de encontrar formatos de navegación únicos en cada tipo de fuerza. En cierto momento, uno de los guerreros estadounidenses golpeó su mano sobre la mesa y nació el GPS, que absorbió todo lo mejor de sus predecesores. En medio de 70, bajo los auspicios del Departamento de Defensa de los Estados Unidos, se creó un comité conjunto tripartito llamado Navigation Satellite Executive Group (NAVSEG), que determinó los parámetros importantes del futuro sistema: el número de satélites, sus alturas, códigos de señales y métodos de modulación. Cuando llegamos a la cifra del costo, decidimos crear inmediatamente dos opciones: militar y comercial, con un error predeterminado en la precisión de posicionamiento. La Fuerza Aérea desempeñó un papel destacado en este programa, ya que su Fuerza Aérea 621B fue el modelo más reflexivo del futuro sistema de navegación, del cual el GPS tomó prestado la tecnología de ruido pseudoaleatorio casi sin cambios. El sistema de sincronización de señales se tomó del proyecto Timtation, pero la órbita se elevó a 20 miles de kilómetros, lo que proporcionó el período de circulación de 12-hora en lugar del 8-hora de su predecesor. Un satélite con experiencia se lanzó al espacio ya en 1978 y, como de costumbre, ya habían preparado toda la infraestructura de tierra necesaria: solo se inventaron siete tipos de equipos de recepción. En 1995, el GPS se implementó por completo: alrededor de los satélites 30 están constantemente en órbita, a pesar del hecho de que 24 es suficiente para funcionar. Se asignan seis planos orbitales para satélites, que tienen una inclinación en 550. En este momento, las aplicaciones de topografía GPS permiten determinar la posición del consumidor con una precisión de menos de un milímetro. Desde 1996, han aparecido los satélites Block 2R, equipados con el sistema de navegación autónomo AutoNav, que permite que el dispositivo funcione en órbita cuando la estación de control en tierra se destruye durante al menos 180 días.
El uso de GPS en el combate hasta el final del 80-x fue esporádico y poco importante: determinar las coordenadas de los campos minados en el Golfo Pérsico y eliminar la imperfección de los mapas durante la invasión de Panamá. El bautismo completo de fuego tuvo lugar en el Golfo Pérsico en 1990-1991 durante la Tormenta del Desierto. Las tropas pudieron maniobrar activamente en el desierto, donde es difícil encontrar puntos de referencia aceptables, así como llevar a cabo disparos de artillería con gran precisión en cualquier momento del día en condiciones de tormentas de arena. Más tarde, el GPS fue útil en una operación de mantenimiento de la paz en Somalia en 1993, en el aterrizaje de estadounidenses en Haití en 1994 y, finalmente, en las campañas afganas e iraquíes del siglo XXI.
información