Pisadas de exoesqueleto lentas pero persistentes
Medio siglo después del inicio del trabajo en el campo de los exoesqueletos, las primeras muestras de este equipo están listas para trabajar en toda regla. Lockheed Martin recientemente se jactó de que su proyecto HULC (Portador de Carga Universal Humano - Sistema de Portador de Carga Universal para Hombre) no solo ha superado las pruebas de campo realizadas con el Pentágono, sino que también está listo para la producción en masa. El exoesqueleto HULC ahora "respira por la espalda" a la vez, varios proyectos similares de otras empresas. Pero tal abundancia de estructuras no fue siempre.

En realidad, la idea de crear cualquier dispositivo que pudiera ser usado por un hombre y mejorar significativamente sus cualidades físicas apareció en la primera mitad del siglo pasado. Sin embargo, hasta cierto tiempo, era solo otra noción de escritores de ciencia ficción. El desarrollo de un sistema de aplicación práctica comenzó solo a finales de los años cincuenta. La compañía General Electric, bajo los auspicios del ejército estadounidense, lanzó un proyecto llamado Hardiman. La tarea técnica fue atrevida: se suponía que el exoesqueleto de GE permitía a una persona operar con cargas que pesaban hasta mil quinientos libras (aproximadamente 680 por kilogramo). En caso de que el proyecto se complete con éxito, el Exoskeleton Hardiman tendría perspectivas notables. Entonces, los militares planearon usar nuevos equipos para facilitar el trabajo de los armeros en la fuerza aérea. Además, "en línea" estaban los científicos nucleares, constructores y representantes de las masas de otras industrias. Pero incluso diez años después del inicio del programa, los ingenieros de General Electric no lograron encarnar todo lo planeado en metal. Se construyeron varios prototipos, incluyendo un brazo mecánico de trabajo. Las enormes garras del Hardymena tenían una transmisión hidráulica y podían levantar 750 libras de carga (aproximadamente 340 kg). Sobre la base de un "guante" viable, fue posible crear un segundo. Pero los diseñadores tenían otro problema. Las "piernas" mecánicas del exoesqueleto no querían funcionar correctamente. El prototipo Hardiman con un brazo y dos soportes para piernas pesaba menos de kilogramos 750, mientras que la capacidad de carga máxima calculada era inferior a su propio peso. Debido a este peso y las características del centrado del exoesqueleto al levantar la carga, a menudo toda la estructura comenzó a vibrar, lo que varias veces condujo a la inclinación. Con amarga ironía, los autores del proyecto llamaron a este fenómeno "la danza mecánica de San Vito". No importa cómo lucharon los diseñadores de General Electric, nunca lograron lidiar con el centrado y las vibraciones. Al comienzo del proyecto 70-x, Hardiman fue cerrado.
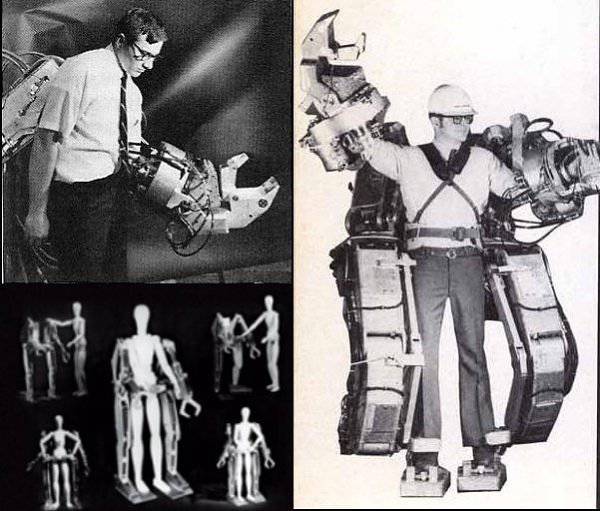
En los años siguientes, el trabajo en la dirección del exoesqueleto quedó inactivo. De vez en cuando comenzaron a participar en varias organizaciones, pero casi siempre no se seguía el resultado adecuado. Al mismo tiempo, el propósito de crear un exoesqueleto no era siempre su uso militar. En 70-ies, los empleados de la Universidad Tecnológica de Massachusetts, sin mucho éxito, desarrollaron equipos de una clase similar, destinados a la rehabilitación de personas discapacitadas con lesiones del sistema musculoesquelético. Desafortunadamente, entonces los problemas de sincronización de varias unidades de vestuario también estaban en el camino de los ingenieros. Cabe señalar que el exoesqueleto tiene una serie de características que no son un poco más fáciles de crear. Por lo tanto, una mejora significativa en las capacidades físicas de un operador humano requiere una fuente de energía adecuada. Este último, a su vez, aumenta el tamaño y el peso de todo el aparato. El segundo inconveniente se encuentra en la interacción del hombre y el exoesqueleto. El principio de funcionamiento de dicho equipo es el siguiente: una persona realiza cualquier movimiento con la mano o el pie. Los sensores especiales asociados con sus extremidades, reciben esta señal y transmiten el comando apropiado a los actuadores: mecanismos hidráulicos o eléctricos. Simultáneamente con el comando, los mismos sensores aseguran que el movimiento de los manipuladores se corresponda con los movimientos del operador. Además de la sincronización de las amplitudes de movimiento, los ingenieros se enfrentan a la cuestión de la correspondencia temporal. El hecho es que cualquier mecánico tiene algún tiempo de reacción. Por lo tanto, debe minimizarse con el objetivo de una facilidad de uso suficiente del exoesqueleto. En el caso de los pequeños exoesqueletos compactos, que ahora se enfatizan, la sincronización de los movimientos humanos y mecánicos tiene una prioridad especial. Dado que el exoesqueleto compacto no permite aumentar la superficie de apoyo, etc., los mecánicos que no tienen tiempo para moverse con la persona pueden afectar negativamente el uso. Por ejemplo, el movimiento prematuro de las "piernas" mecánicas puede llevar al hecho de que una persona simplemente pierde el equilibrio y se cae. Y esto no es todos los problemas. Obviamente, el pie de una persona tiene menos grados de libertad que un brazo, y mucho menos una mano y dedos.
El mas nuevo historia Los exoesqueletos militares comenzaron en el año 2000. Luego, la agencia estadounidense DARPA inició el inicio del programa EHPA (Exoskeletons for Human Performance Augmentation - Exoskeletons para aumentar la productividad humana). El programa EHPA era parte de un proyecto más grande de Land Warrior que involucraba la creación de la imagen de un futuro soldado. Sin embargo, en 2007, el Land Warrior fue cancelado, pero su parte de exoesqueleto fue continuada. El objetivo del proyecto EHPA era crear un llamado. Exoesqueleto completo, que tenía en su composición amplificadores para las manos y los pies de una persona. Al mismo tiempo, no se requerían armas ni reservas. Las personas responsables de DARPA y el Pentágono entendieron perfectamente que la situación actual en el campo de los exoesqueletos simplemente no permite equiparlos con funciones adicionales. Por lo tanto, la tarea técnica del programa EHPA implica solo la posibilidad de un transporte a largo plazo por parte de un soldado en el exoesqueleto de una carga que pesa alrededor de 100 kilogramos y aumenta su velocidad de movimiento.
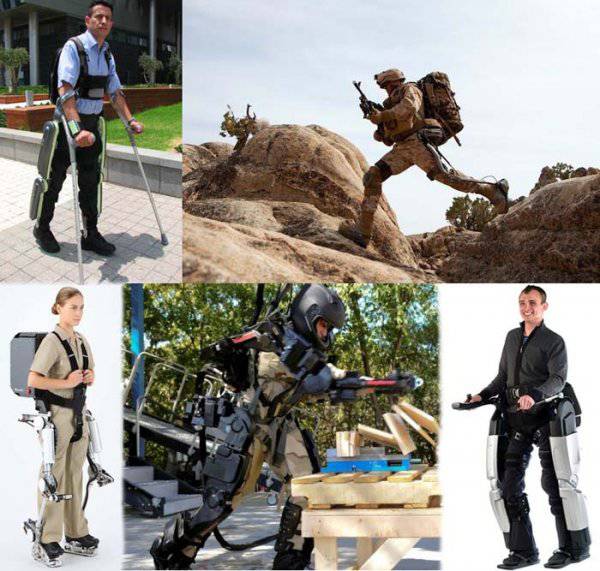
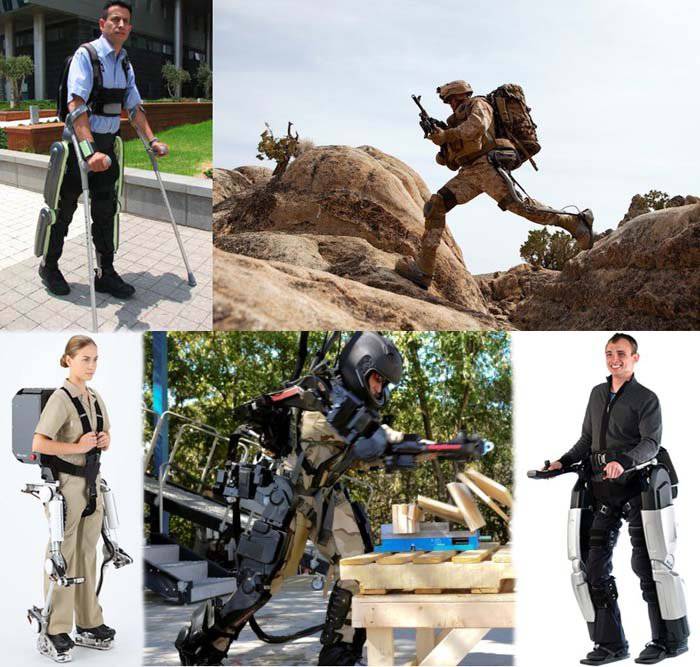
Sacros y la Universidad de Berkeley (EE. UU.), Así como los sistemas japoneses Cyberdyne, expresaron su deseo de participar en el desarrollo de nuevas tecnologías. Doce años han pasado desde que comenzó el programa, y durante este tiempo la lista de participantes ha sufrido algunos cambios. Hasta la fecha, Sacros se convirtió en parte de la preocupación Raytheon, y un departamento universitario llamado Berkeley Bionics se convirtió en una división de Lockheed Martin. De todos modos, ahora hay tres prototipos de exoesqueletos creados por el programa EHPA: Lockheed Martin HULC, Cyberdyne HAL y Raytheon XOS.
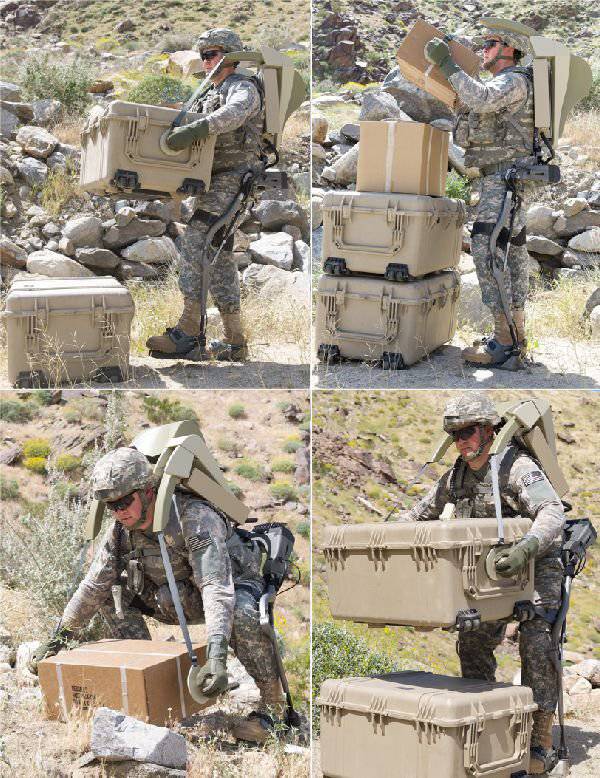
El primero de estos exoesqueletos, HULC, no cumple con los requisitos de DARPA. El hecho es que el diseño 25-kilogram incorpora solo un sistema de soporte de respaldo y "patas" mecánicas. El apoyo manual en HULC no está implementado. Al mismo tiempo, las capacidades físicas del operador de HULC se ven mejoradas por el hecho de que a través del sistema de soporte para la espalda, la mayor parte de la carga en las manos se transfiere a los elementos de potencia del exoesqueleto y, finalmente, "va" al suelo. Gracias al sistema aplicado, los soldados pueden transportar hasta 90 kilogramos de carga y al mismo tiempo experimentar una carga que cumple con todos los estándares del ejército. HULC está equipado con una batería de iones de litio, cuya capacidad es suficiente para funcionar durante ocho horas. En el modo económico, una persona en un exoesqueleto puede caminar a una velocidad de 4-5 kilómetros por hora. La velocidad HULC máxima posible es 17-18 km / h, sin embargo, este modo de operación del sistema reduce significativamente el tiempo de operación de una sola carga de batería. En el futuro, Lockheed Martin promete equipar a HULC con celdas de combustible, cuya capacidad será suficiente para un día de trabajo. Además, en las versiones futuras, los diseñadores prometen "robotizar" las manos, lo que mejorará en gran medida la capacidad del exoesqueleto del usuario.

La compañía Raytheon actualmente presenta dos exoesqueletos similares hasta cierto punto con los índices XOS-1 y XOS-2. Se diferencian en los parámetros de peso y tamaño y, como resultado, en una serie de características prácticas. A diferencia de HULC, la familia XOS está equipada con un sistema de descarga manual. Ambos de estos exoesqueletos pueden levantar un peso comparable a su propio peso de aproximadamente un kilogramo de 80-90. Cabe destacar que el diseño de ambos XOS le permite instalar varios manipuladores en los brazos mecánicos. Cabe señalar que hasta ahora XOS-1 y XOS-2 tienen un consumo de energía significativo. Debido a esto, aún no son autónomos y requieren energía externa. En consecuencia, la velocidad máxima de movimiento y la duración de la batería de la voz aún no está. Pero, según Raytheon, la necesidad de alimentación por cable no será un obstáculo para el uso de XOS en almacenes o bases militares, donde existe una fuente de electricidad adecuada.

La tercera muestra del programa EHPA es Cyberdyne HAL. Hasta la fecha, la versión actual es HAL-5. Este exoesqueleto es en cierta medida una mezcla de los dos primeros. Al igual que HULC, tiene la capacidad de usarlo de forma autónoma: hay suficiente duración de batería para una hora 2,5-3. Con la familia XOS, el desarrollo de Cyberdyne Systems combina la "plenitud" del diseño: incluye sistemas de soporte para brazos y piernas. Sin embargo, la capacidad de carga del HAL-5 no excede un par de decenas de kilogramos. Del mismo modo, la situación con las cualidades de velocidad de este desarrollo. El hecho es que los diseñadores japoneses no se enfocaron en el uso militar, sino en la rehabilitación de personas discapacitadas. Obviamente, estos usuarios simplemente no necesitan alta velocidad o capacidad. En consecuencia, si el HAL-5 en su estado actual está interesado en los militares, será posible hacer sobre su base un nuevo exoesqueleto, afilado para uso militar.
De todas las variantes de exoesqueletos prometedores presentados a la competencia EHPA, solo HULC ha llegado a las pruebas junto con el ejército. Una serie de características de otros proyectos todavía no permiten que comiencen las pruebas de campo. En septiembre, se enviarán varios conjuntos de HULC a las unidades para estudiar las características del trabajo del exoesqueleto en condiciones reales. Si todo va bien, entonces la producción de alto volumen comenzará en 2014-15.
Mientras tanto, los científicos y diseñadores tendrán conceptos y diseños más avanzados. La innovación más esperada en el campo de los exoesqueletos son los guantes robóticos. Los manipuladores existentes aún no son muy convenientes para el uso de herramientas y objetos similares destinados al uso manual. Además, la creación de tales guantes está asociada con una serie de dificultades. En general, son similares a los de otros agregados de exoesqueleto, pero en este caso los problemas de sincronización se ven agravados por un gran número de elementos mecánicos, características del movimiento de la mano humana, etc. La siguiente etapa en el desarrollo de exoesqueletos será la creación de una interfaz neuroelectrónica. Ahora los movimientos de la mecánica están controlados por sensores y unidades de seguimiento. Más conveniente para los ingenieros y científicos es el uso de un sistema de control con electrodos que eliminan los impulsos nerviosos humanos. Entre otras cosas, tal sistema reducirá el tiempo de reacción de los mecanismos y, como resultado, aumentará la eficiencia de todo el exoesqueleto.
En cuanto a la aplicación práctica, durante el último medio siglo, las opiniones sobre ella apenas han cambiado. Los principales usuarios de los sistemas prometedores todavía se consideran militares. Pueden usar exoesqueletos para cargar y descargar, preparar municiones y también, en una situación de combate, para mejorar las capacidades de los combatientes. Cabe señalar que la capacidad de carga de los exoesqueletos será útil no sólo para los militares. La amplia distribución de tecnología que permite a una persona aumentar significativamente sus capacidades físicas, puede cambiar la apariencia de toda la logística y la carga. Por ejemplo, el tiempo para cargar un semirremolque de carga en ausencia de carretillas elevadoras disminuirá en decenas de porcentaje, lo que aumentará la eficiencia de todo el sistema de transporte. Finalmente, los exoesqueletos controlados por impulsos nerviosos ayudarán a los opornikami discapacitados a volver a vivir una vida plena. Además, hay muchas esperanzas en la interfaz neuroelectrónica: con lesiones de la columna, etc. Las señales de lesiones del cerebro pueden no llegar a cierta parte del cuerpo. Si los “intercepta” al área dañada del nervio y los envía al sistema de control del exoesqueleto, la persona ya no estará confinada a una silla de ruedas o una cama. Por lo tanto, los desarrollos militares, una vez más, pueden mejorar la vida no solo de los militares. Solo por ahora, construyendo grandes planes, debe recordar acerca de la operación piloto del exoesqueleto Lockheed Martin HULC, que comenzará en otoño. De acuerdo con sus resultados, será posible juzgar tanto las perspectivas de toda la industria como el interés de usuarios potenciales.
En los materiales de los sitios:
http://darpa.mil/
http://davidszondy.com/
http://lockheedmartin.com/
http://raytheon.com/
http://cyberdyne.jp/
http://rosbalt.ru/
En realidad, la idea de crear cualquier dispositivo que pudiera ser usado por un hombre y mejorar significativamente sus cualidades físicas apareció en la primera mitad del siglo pasado. Sin embargo, hasta cierto tiempo, era solo otra noción de escritores de ciencia ficción. El desarrollo de un sistema de aplicación práctica comenzó solo a finales de los años cincuenta. La compañía General Electric, bajo los auspicios del ejército estadounidense, lanzó un proyecto llamado Hardiman. La tarea técnica fue atrevida: se suponía que el exoesqueleto de GE permitía a una persona operar con cargas que pesaban hasta mil quinientos libras (aproximadamente 680 por kilogramo). En caso de que el proyecto se complete con éxito, el Exoskeleton Hardiman tendría perspectivas notables. Entonces, los militares planearon usar nuevos equipos para facilitar el trabajo de los armeros en la fuerza aérea. Además, "en línea" estaban los científicos nucleares, constructores y representantes de las masas de otras industrias. Pero incluso diez años después del inicio del programa, los ingenieros de General Electric no lograron encarnar todo lo planeado en metal. Se construyeron varios prototipos, incluyendo un brazo mecánico de trabajo. Las enormes garras del Hardymena tenían una transmisión hidráulica y podían levantar 750 libras de carga (aproximadamente 340 kg). Sobre la base de un "guante" viable, fue posible crear un segundo. Pero los diseñadores tenían otro problema. Las "piernas" mecánicas del exoesqueleto no querían funcionar correctamente. El prototipo Hardiman con un brazo y dos soportes para piernas pesaba menos de kilogramos 750, mientras que la capacidad de carga máxima calculada era inferior a su propio peso. Debido a este peso y las características del centrado del exoesqueleto al levantar la carga, a menudo toda la estructura comenzó a vibrar, lo que varias veces condujo a la inclinación. Con amarga ironía, los autores del proyecto llamaron a este fenómeno "la danza mecánica de San Vito". No importa cómo lucharon los diseñadores de General Electric, nunca lograron lidiar con el centrado y las vibraciones. Al comienzo del proyecto 70-x, Hardiman fue cerrado.
En los años siguientes, el trabajo en la dirección del exoesqueleto quedó inactivo. De vez en cuando comenzaron a participar en varias organizaciones, pero casi siempre no se seguía el resultado adecuado. Al mismo tiempo, el propósito de crear un exoesqueleto no era siempre su uso militar. En 70-ies, los empleados de la Universidad Tecnológica de Massachusetts, sin mucho éxito, desarrollaron equipos de una clase similar, destinados a la rehabilitación de personas discapacitadas con lesiones del sistema musculoesquelético. Desafortunadamente, entonces los problemas de sincronización de varias unidades de vestuario también estaban en el camino de los ingenieros. Cabe señalar que el exoesqueleto tiene una serie de características que no son un poco más fáciles de crear. Por lo tanto, una mejora significativa en las capacidades físicas de un operador humano requiere una fuente de energía adecuada. Este último, a su vez, aumenta el tamaño y el peso de todo el aparato. El segundo inconveniente se encuentra en la interacción del hombre y el exoesqueleto. El principio de funcionamiento de dicho equipo es el siguiente: una persona realiza cualquier movimiento con la mano o el pie. Los sensores especiales asociados con sus extremidades, reciben esta señal y transmiten el comando apropiado a los actuadores: mecanismos hidráulicos o eléctricos. Simultáneamente con el comando, los mismos sensores aseguran que el movimiento de los manipuladores se corresponda con los movimientos del operador. Además de la sincronización de las amplitudes de movimiento, los ingenieros se enfrentan a la cuestión de la correspondencia temporal. El hecho es que cualquier mecánico tiene algún tiempo de reacción. Por lo tanto, debe minimizarse con el objetivo de una facilidad de uso suficiente del exoesqueleto. En el caso de los pequeños exoesqueletos compactos, que ahora se enfatizan, la sincronización de los movimientos humanos y mecánicos tiene una prioridad especial. Dado que el exoesqueleto compacto no permite aumentar la superficie de apoyo, etc., los mecánicos que no tienen tiempo para moverse con la persona pueden afectar negativamente el uso. Por ejemplo, el movimiento prematuro de las "piernas" mecánicas puede llevar al hecho de que una persona simplemente pierde el equilibrio y se cae. Y esto no es todos los problemas. Obviamente, el pie de una persona tiene menos grados de libertad que un brazo, y mucho menos una mano y dedos.
El mas nuevo historia Los exoesqueletos militares comenzaron en el año 2000. Luego, la agencia estadounidense DARPA inició el inicio del programa EHPA (Exoskeletons for Human Performance Augmentation - Exoskeletons para aumentar la productividad humana). El programa EHPA era parte de un proyecto más grande de Land Warrior que involucraba la creación de la imagen de un futuro soldado. Sin embargo, en 2007, el Land Warrior fue cancelado, pero su parte de exoesqueleto fue continuada. El objetivo del proyecto EHPA era crear un llamado. Exoesqueleto completo, que tenía en su composición amplificadores para las manos y los pies de una persona. Al mismo tiempo, no se requerían armas ni reservas. Las personas responsables de DARPA y el Pentágono entendieron perfectamente que la situación actual en el campo de los exoesqueletos simplemente no permite equiparlos con funciones adicionales. Por lo tanto, la tarea técnica del programa EHPA implica solo la posibilidad de un transporte a largo plazo por parte de un soldado en el exoesqueleto de una carga que pesa alrededor de 100 kilogramos y aumenta su velocidad de movimiento.
Sacros y la Universidad de Berkeley (EE. UU.), Así como los sistemas japoneses Cyberdyne, expresaron su deseo de participar en el desarrollo de nuevas tecnologías. Doce años han pasado desde que comenzó el programa, y durante este tiempo la lista de participantes ha sufrido algunos cambios. Hasta la fecha, Sacros se convirtió en parte de la preocupación Raytheon, y un departamento universitario llamado Berkeley Bionics se convirtió en una división de Lockheed Martin. De todos modos, ahora hay tres prototipos de exoesqueletos creados por el programa EHPA: Lockheed Martin HULC, Cyberdyne HAL y Raytheon XOS.
El primero de estos exoesqueletos, HULC, no cumple con los requisitos de DARPA. El hecho es que el diseño 25-kilogram incorpora solo un sistema de soporte de respaldo y "patas" mecánicas. El apoyo manual en HULC no está implementado. Al mismo tiempo, las capacidades físicas del operador de HULC se ven mejoradas por el hecho de que a través del sistema de soporte para la espalda, la mayor parte de la carga en las manos se transfiere a los elementos de potencia del exoesqueleto y, finalmente, "va" al suelo. Gracias al sistema aplicado, los soldados pueden transportar hasta 90 kilogramos de carga y al mismo tiempo experimentar una carga que cumple con todos los estándares del ejército. HULC está equipado con una batería de iones de litio, cuya capacidad es suficiente para funcionar durante ocho horas. En el modo económico, una persona en un exoesqueleto puede caminar a una velocidad de 4-5 kilómetros por hora. La velocidad HULC máxima posible es 17-18 km / h, sin embargo, este modo de operación del sistema reduce significativamente el tiempo de operación de una sola carga de batería. En el futuro, Lockheed Martin promete equipar a HULC con celdas de combustible, cuya capacidad será suficiente para un día de trabajo. Además, en las versiones futuras, los diseñadores prometen "robotizar" las manos, lo que mejorará en gran medida la capacidad del exoesqueleto del usuario.
La compañía Raytheon actualmente presenta dos exoesqueletos similares hasta cierto punto con los índices XOS-1 y XOS-2. Se diferencian en los parámetros de peso y tamaño y, como resultado, en una serie de características prácticas. A diferencia de HULC, la familia XOS está equipada con un sistema de descarga manual. Ambos de estos exoesqueletos pueden levantar un peso comparable a su propio peso de aproximadamente un kilogramo de 80-90. Cabe destacar que el diseño de ambos XOS le permite instalar varios manipuladores en los brazos mecánicos. Cabe señalar que hasta ahora XOS-1 y XOS-2 tienen un consumo de energía significativo. Debido a esto, aún no son autónomos y requieren energía externa. En consecuencia, la velocidad máxima de movimiento y la duración de la batería de la voz aún no está. Pero, según Raytheon, la necesidad de alimentación por cable no será un obstáculo para el uso de XOS en almacenes o bases militares, donde existe una fuente de electricidad adecuada.

La tercera muestra del programa EHPA es Cyberdyne HAL. Hasta la fecha, la versión actual es HAL-5. Este exoesqueleto es en cierta medida una mezcla de los dos primeros. Al igual que HULC, tiene la capacidad de usarlo de forma autónoma: hay suficiente duración de batería para una hora 2,5-3. Con la familia XOS, el desarrollo de Cyberdyne Systems combina la "plenitud" del diseño: incluye sistemas de soporte para brazos y piernas. Sin embargo, la capacidad de carga del HAL-5 no excede un par de decenas de kilogramos. Del mismo modo, la situación con las cualidades de velocidad de este desarrollo. El hecho es que los diseñadores japoneses no se enfocaron en el uso militar, sino en la rehabilitación de personas discapacitadas. Obviamente, estos usuarios simplemente no necesitan alta velocidad o capacidad. En consecuencia, si el HAL-5 en su estado actual está interesado en los militares, será posible hacer sobre su base un nuevo exoesqueleto, afilado para uso militar.
De todas las variantes de exoesqueletos prometedores presentados a la competencia EHPA, solo HULC ha llegado a las pruebas junto con el ejército. Una serie de características de otros proyectos todavía no permiten que comiencen las pruebas de campo. En septiembre, se enviarán varios conjuntos de HULC a las unidades para estudiar las características del trabajo del exoesqueleto en condiciones reales. Si todo va bien, entonces la producción de alto volumen comenzará en 2014-15.
Mientras tanto, los científicos y diseñadores tendrán conceptos y diseños más avanzados. La innovación más esperada en el campo de los exoesqueletos son los guantes robóticos. Los manipuladores existentes aún no son muy convenientes para el uso de herramientas y objetos similares destinados al uso manual. Además, la creación de tales guantes está asociada con una serie de dificultades. En general, son similares a los de otros agregados de exoesqueleto, pero en este caso los problemas de sincronización se ven agravados por un gran número de elementos mecánicos, características del movimiento de la mano humana, etc. La siguiente etapa en el desarrollo de exoesqueletos será la creación de una interfaz neuroelectrónica. Ahora los movimientos de la mecánica están controlados por sensores y unidades de seguimiento. Más conveniente para los ingenieros y científicos es el uso de un sistema de control con electrodos que eliminan los impulsos nerviosos humanos. Entre otras cosas, tal sistema reducirá el tiempo de reacción de los mecanismos y, como resultado, aumentará la eficiencia de todo el exoesqueleto.
En cuanto a la aplicación práctica, durante el último medio siglo, las opiniones sobre ella apenas han cambiado. Los principales usuarios de los sistemas prometedores todavía se consideran militares. Pueden usar exoesqueletos para cargar y descargar, preparar municiones y también, en una situación de combate, para mejorar las capacidades de los combatientes. Cabe señalar que la capacidad de carga de los exoesqueletos será útil no sólo para los militares. La amplia distribución de tecnología que permite a una persona aumentar significativamente sus capacidades físicas, puede cambiar la apariencia de toda la logística y la carga. Por ejemplo, el tiempo para cargar un semirremolque de carga en ausencia de carretillas elevadoras disminuirá en decenas de porcentaje, lo que aumentará la eficiencia de todo el sistema de transporte. Finalmente, los exoesqueletos controlados por impulsos nerviosos ayudarán a los opornikami discapacitados a volver a vivir una vida plena. Además, hay muchas esperanzas en la interfaz neuroelectrónica: con lesiones de la columna, etc. Las señales de lesiones del cerebro pueden no llegar a cierta parte del cuerpo. Si los “intercepta” al área dañada del nervio y los envía al sistema de control del exoesqueleto, la persona ya no estará confinada a una silla de ruedas o una cama. Por lo tanto, los desarrollos militares, una vez más, pueden mejorar la vida no solo de los militares. Solo por ahora, construyendo grandes planes, debe recordar acerca de la operación piloto del exoesqueleto Lockheed Martin HULC, que comenzará en otoño. De acuerdo con sus resultados, será posible juzgar tanto las perspectivas de toda la industria como el interés de usuarios potenciales.
En los materiales de los sitios:
http://darpa.mil/
http://davidszondy.com/
http://lockheedmartin.com/
http://raytheon.com/
http://cyberdyne.jp/
http://rosbalt.ru/
información