Sneak Sumergibles
Ambiente permeable y factores de desenmascaramiento.
El uso de combate de los submarinos y otros vehículos submarinos se basa en su calidad, como el secreto de las acciones para el enemigo atacado. El ambiente acuático, en cuya profundidad operan las AP, limita la distancia de detección mediante radio y ubicación óptica de varias decenas de metros. Por otro lado, la alta velocidad de propagación del sonido en el agua, alcanzando 1,5 km / s, permite el uso de la detección de ruido y la ecolocación. El agua también es permeable al componente magnético de la radiación electromagnética que se propaga a una velocidad de 300000 km / s.

Los factores adicionales de desenmascaramiento de la PA son:
- rastro de estela (pluma aire-agua) generada por una hélice (hélice o chorro) en la capa de agua cercana a la superficie o en las capas profundas en caso de cavitación en las palas de la hélice;
- trazas químicas de los gases de escape del motor térmico PA;
- traza térmica que surge de la eliminación del calor de la planta de energía PA en el medio ambiente acuático;
- la traza de radiación dejada por la AP con las centrales nucleares;
- Formación de ondas superficiales asociada con el movimiento de masas de agua durante el movimiento de la AP.
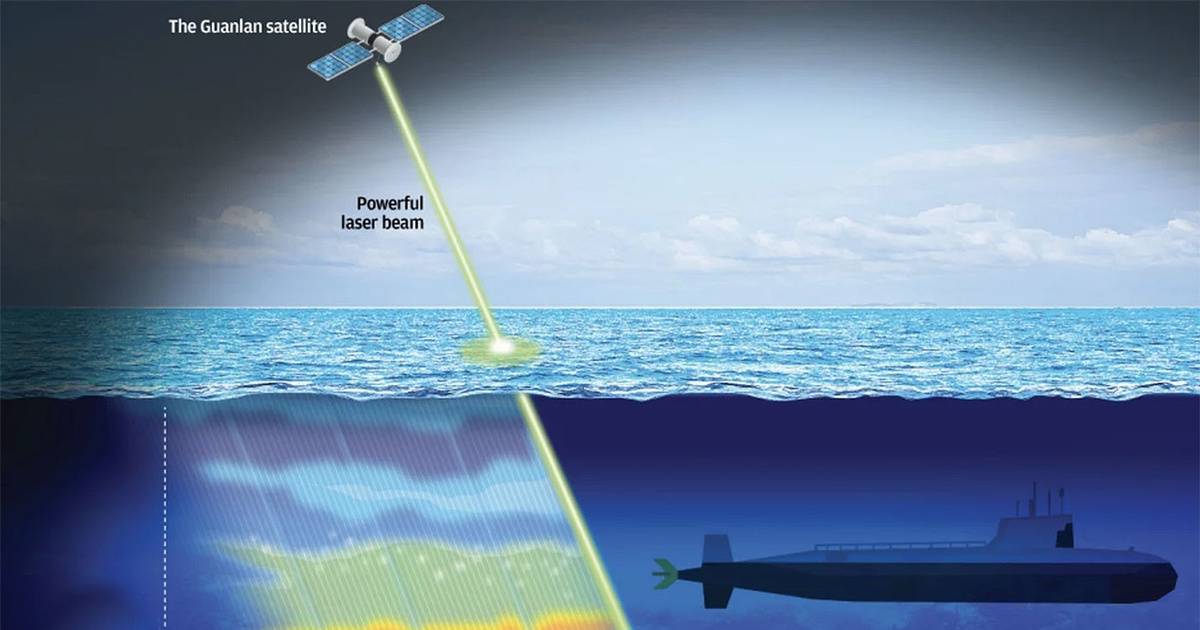
Ubicación óptica
A pesar de la limitada distancia de detección, la ubicación óptica ha encontrado su aplicación en las aguas de mares tropicales con alta transparencia de agua en condiciones de olas bajas y profundidades poco profundas. Los localizadores ópticos en forma de cámaras de alta resolución que operan en el infrarrojo y las bandas visibles se instalan a bordo de aeronaves, helicópteros y vehículos aéreos no tripulados, completos con reflectores de alta potencia y localizadores láser. El ancho de banda alcanza los medidores 500, la profundidad de visibilidad en condiciones favorables - medidores 100.
El radar se utiliza para detectar periscopios elevados sobre la superficie del agua, antenas, dispositivos de admisión y los controladores de tráfico aéreo en la posición de la superficie. El rango de detección utilizando un radar instalado a bordo de un portaaviones está determinado por la altitud del portaaviones y varía de varias docenas (dispositivos PA retráctiles) a varios cientos (PA) de kilómetros. En el caso de uso en los dispositivos deslizantes, los materiales de construcción radio-transparentes de PA y el rango de detección de recubrimientos ocultos se reducen en más de un pedido.
Otro método de detección por radar del AP que se mueve bajo el agua es la fijación de la formación de ondas en la superficie del mar generada en el proceso de impacto hidrodinámico del casco y la PA de propulsión en la columna de agua. Este proceso se puede observar en una gran área de agua, tanto de las aeronaves como de los portadores de radares satelitales equipados con hardware y software especializados para resaltar el terreno débil de una onda satelital de AP sobre el fondo de la interferencia de las ondas de viento y la formación de ondas de los buques de superficie y la costa. Sin embargo, las ondas satelitales se hacen visibles solo cuando el PA se mueve a poca profundidad en condiciones climáticas tranquilas.

Los factores adicionales de desenmascaramiento en forma de estela, térmica, química y de radiación se utilizan principalmente para perseguir una AP con el fin de controlar de forma encubierta su movimiento (sin alcanzar la línea del sonar) o producir un ataque de torpedo desde los ángulos de intercambio de alimentación de la PA atacada. El ancho relativamente pequeño de la pista, combinado con el curso de maniobras de la AP, obliga al perseguidor a moverse a lo largo de una trayectoria en zigzag a una velocidad dos veces mayor que la velocidad de la AP, lo que aumenta la distancia de detección del perseguidor debido al mayor nivel de ruido generado y sale del área de alimentación en la sombra de la AP. En este sentido, el movimiento en el camino es temporal para alcanzar la distancia del contacto hidroacústico con el AP, lo que permite, entre otras cosas, calificar al objetivo según el criterio de vehículo propio / extranjero y tipo de vehículo submarino.

Metodo magnetometrico
Un método efectivo para detectar AP es magnetométrico, que funciona independientemente del estado de la superficie del mar (olas, hielo), la profundidad y la hidrología del área del agua, la topografía del fondo y la intensidad de la navegación. El uso de materiales de construcción diamagnéticos en un diseño de PA solo permite acortar la distancia de detección, ya que los componentes de acero y los productos eléctricos están necesariamente incluidos en la composición de la planta de energía, la unidad de propulsión y el equipo de PA. Además, la hélice, el impulsor de chorro de agua y el casco de PA (independientemente del material estructural) en movimiento acumulan cargas eléctricas estáticas que generan un campo magnético secundario.
Los magnetómetros prospectivos están equipados con sensores superconductores SQUID, recipientes criogénicos Dewar para almacenar nitrógeno líquido (modelado en Javelin ATGM) y máquinas de refrigeración compactas para mantener el nitrógeno en estado líquido.

Los magnetómetros existentes tienen un rango de detección de un submarino nuclear con un casco de acero en 1 km. Los posibles magnetómetros detectan un submarino nuclear con un casco de acero a una distancia de 5 km. Un submarino con un casco de titanio, a una distancia de 2,5 km. Además del material del casco, la intensidad del campo magnético es directamente proporcional al desplazamiento del PA, por lo tanto, el pequeño sumergible Poseidon con un casco de titanio tiene un campo magnético 700 veces más pequeño que el submarino nuclear Yasen con un casco de acero y, en consecuencia, un rango de detección más pequeño.
Los principales portadores de magnetómetros son aviones antisubmarinos de la base. aviación, para aumentar la sensibilidad de los sensores del magnetómetro se ubican en la protuberancia trasera del fuselaje. Para aumentar la profundidad de la detección de PA y expandir la banda de búsqueda, los aviones antisubmarinos vuelan a una altitud de 100 metros o menos de la superficie del mar. Los portadores de superficie usan la versión remolcada de magnetómetros, los portadores submarinos usan la versión a bordo con compensación por el campo magnético del portador.
Además de la limitación en el rango, el método de detección magnetométrico también tiene una limitación por la velocidad del PA, debido a la ausencia de un gradiente de campo magnético intrínseco, los objetos estacionarios subacuáticos son reconocidos solo como anomalías del campo magnético de la Tierra y requieren una clasificación posterior utilizando hidroacústica. En el caso de utilizar magnetómetros en los sistemas de giro torpedo / anti-torpedo, no hay límite de velocidad debido a la secuencia inversa de detección y clasificación de objetivos durante un ataque torpedo / anti-torpedo.

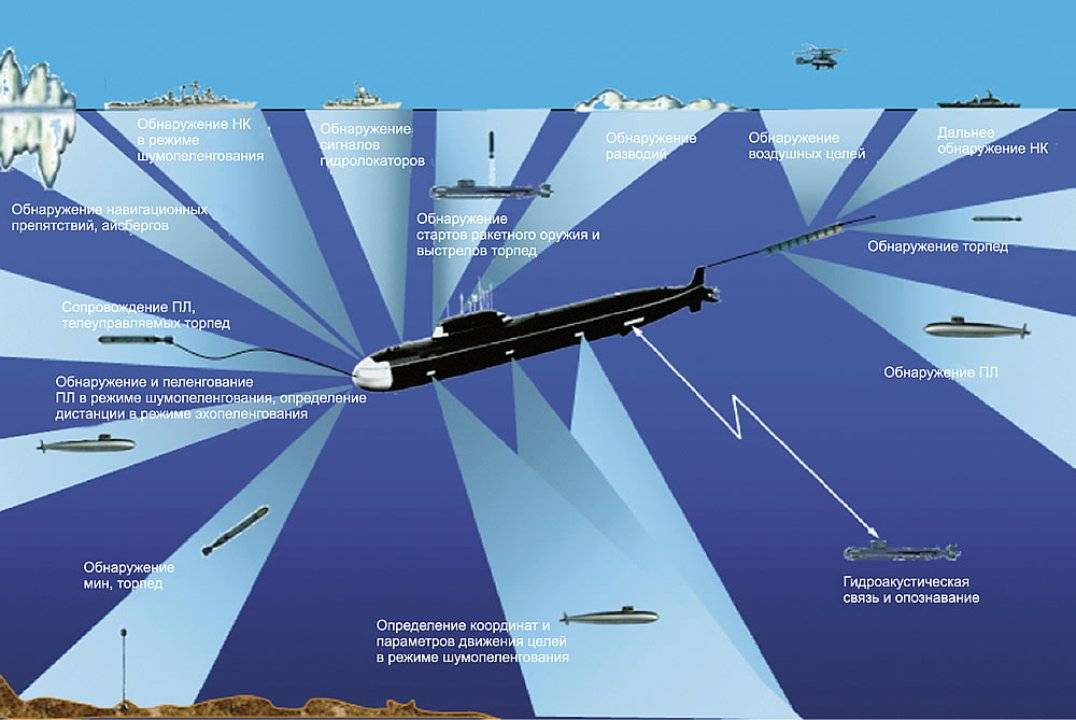
Método de sonar
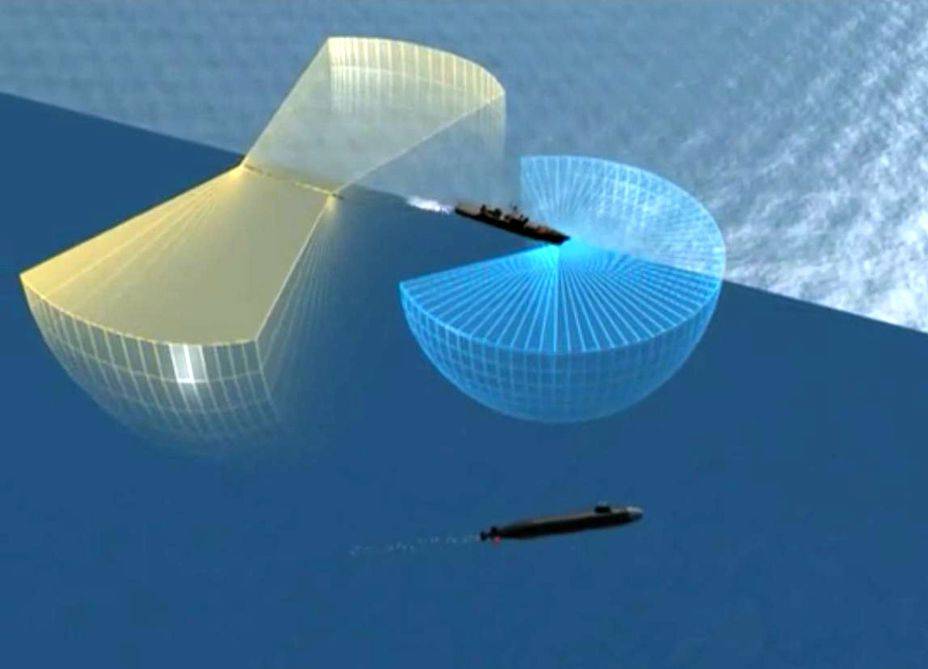
El método más común para detectar una PA es hidroacústico, que incluye la búsqueda pasiva del ruido de PA intrínseco y la ecolocación activa del entorno acuático mediante la emisión direccional de ondas de sonido y la recepción de señales reflejadas. Hydroacoustics utiliza toda la gama de ondas sonoras: vibraciones infrasónicas con una frecuencia de 1 a 20 Hz, vibraciones audibles con una frecuencia de 20 Hz a 20 KHz y vibraciones ultrasónicas de 20 KHz a varios cientos de KHz.
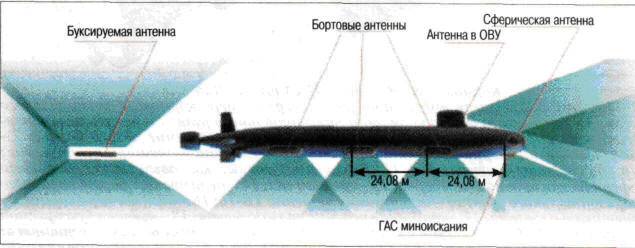
Los transceptores hidroacústicos incluyen antenas conformes, esféricas, cilíndricas, planas y lineales, ensambladas desde una variedad de hidrófonos a conjuntos tridimensionales, conjuntos de fases activos y campos de antenas conectados a hardware especializado y dispositivos de software que aseguran la escucha del campo de ruido, la generación de pulsos de ecolocalización y la recepción. Señales reflejadas. Las antenas y los dispositivos de hardware y software se combinan en estaciones hidroacústicas (GUS).
Las antenas hidroacústicas de los módulos transceptores están hechas de los siguientes materiales:
- Piezocerámicos policristalinos, principalmente titanato de zirconato de plomo, modificado con aditivos de estroncio y bario;
- una película piezoeléctrica de fluoropolímero, modificada con tiamina, que convierte la estructura del polímero en la fase beta;
- Interferómetro de fibra láser con bombeo láser.
Piezoceramics proporciona la mayor densidad de potencia de las oscilaciones de sonido, por lo que se utiliza en sonares con una antena esférica / cilíndrica de mayor alcance en el modo de radiación activa, instalada en la punta nasal de portadores marinos (a la mayor distancia de la propulsión que genera ruido parásito) o montada en una cápsula, más baja Profundidad y remolcado detrás del portador.
La película de piezofluoropolímero con una baja densidad de potencia de generación de vibraciones de sonido se utiliza para fabricar antenas conformes ubicadas directamente en la superficie de un cuerpo de superficie y vehículos subacuáticos de curvatura única (para garantizar las características hidroacústicas isotrópicas) que funcionan para recibir todo tipo de señales o para transmitir señales de baja potencia.
El interferómetro de fibra óptica funciona solo en la recepción de señales y consta de dos fibras, una de las cuales experimenta compresión-expansión bajo la acción de las ondas de sonido, y la otra sirve como medio de referencia para medir la interferencia de la radiación láser en ambas fibras. Debido al pequeño diámetro de la fibra óptica, sus oscilaciones de compresión-expansión no distorsionan el frente de difracción de las ondas de sonido (a diferencia de los hidrófonos piezoeléctricos de grandes dimensiones lineales) y permiten una determinación más precisa de la posición de los objetos en el entorno acuático. Las antenas flexibles remolcadas y las antenas lineales inferiores de hasta 1 km de largo están formadas por módulos de fibra óptica.
Los piezocerámicos también se utilizan en sensores de hidrófonos, cuyos conjuntos espaciales forman parte de boyas flotantes descargadas en el mar desde aviones antisubmarinos, después de lo cual los hidrófonos se bajan al cable a una profundidad predeterminada y se transfieren al modo de detección de ruido con la transmisión de la información recopilada por radio al avión. Para aumentar el área del área de agua controlada, junto con las boyas flotantes, se lanzan una serie de granadas profundas, cuyas explosiones iluminan hidroacústicamente los objetos bajo el agua. En el caso del uso de helicópteros antisubmarinos o cuadrocópteros para buscar objetos bajo el agua, una antena receptora-transmisora del HAC a bordo, que es una matriz de elementos piezocerámicos, se baja sobre el cable.
Las antenas conformes de una película de piezofluoropolímero se montan en forma de varias secciones espaciadas a lo largo del lado PA para determinar no solo el azimut sino también la distancia (mediante el método de trigonometría) a la fuente de ruido submarina o las señales de ubicación reflejadas.
Las antenas flexibles remolcadas y de fondo lineal hechas de fibra óptica, a pesar de su bajo costo, tienen una propiedad operativa negativa: debido a la gran longitud de la "cadena" de la antena, sufre flexión y vibraciones torsionales bajo la influencia del flujo de agua entrante, lo que se deteriora varias veces. En comparación con las antenas piezocerámicas y piezofluoropolímero con banda rígida. En este sentido, las antenas de sonar más precisas se fabrican en forma de un conjunto de carretes enrollados con fibra óptica y se montan en granjas espaciales dentro de carcasas cilíndricas rellenas de agua acústicamente transparentes que protegen a las antenas de la influencia externa de los flujos de agua. Las carcasas están unidas rígidamente a los cimientos ubicados en la parte inferior y conectados por cables de alimentación y líneas de comunicación con los centros costeros de defensa antisubmarina. Si los generadores termoeléctricos de radioisótopos también se colocan dentro de las carcasas, los dispositivos obtenidos (autónomos por la fuente de alimentación) se transfieren a la descarga de las estaciones de sonar de fondo.
La revisión moderna de GUS de la situación bajo el agua, la búsqueda y la clasificación de los objetos bajo el agua funcionan en la parte inferior del rango de audio, desde 1 Hz a 5 KHz. Se montan en varios transportistas marítimos y aéreos, forman parte de las boyas flotantes y las estaciones del fondo, se diferencian en una variedad de formas y materiales piezoeléctricos, su lugar de instalación, energía y modo de recepción / emisión. GAS busca minas, contrarresta a los saboteadores y submarinistas submarinos y proporciona comunicaciones de sonido bajo el agua en el rango ultrasónico en frecuencias por encima de 20 KHz, incluido el llamado modo de sonido-visión con objetos detallados en la escala de varios centímetros. Un ejemplo típico de tales dispositivos es el "ánfora" de GAS, una antena esférica de polímero que se instala en la punta superior frontal del cercado de cercos submarinos.
En el caso de la presencia a bordo de un operador de telefonía móvil o como parte de un sistema estacionario de varios HAS, se combinan en un único complejo de sonar (GAK) por medio del procesamiento computacional conjunto de datos de ubicación activa y búsqueda pasiva de direcciones. Los algoritmos de procesamiento permiten la desintonización del software del ruido generado por la propia portadora y el fondo de ruido externo generado por la navegación marítima, las ondas de viento, los reflejos múltiples del sonido de la superficie del agua y el fondo en aguas poco profundas (ruido de reverberación).
Algoritmos computacionales
Los algoritmos para el procesamiento computacional de las señales de ruido recibidas de las AP se basan en el principio de extraer el ruido repetido cíclicamente de la rotación de las palas de la hélice, el funcionamiento de las escobillas colectoras de corriente del motor eléctrico, el ruido resonante de las cajas de cambios de la hélice, la vibración de las turbinas de vapor, las bombas y otros equipos mecánicos. Además, el uso de una base de datos de espectros de ruido característicos de un tipo particular de objetos nos permite calificar objetivos para las características de su propio / extranjero, submarino / superficie, militar / civil, choque / submarino multipropósito, GUS a bordo / remolcado / rebajado, etc. En el caso de la compilación preliminar de los "retratos" de sonido espectral de las AP individuales, es posible llevar a cabo su identificación de acuerdo con las características individuales de la operación de los mecanismos a bordo.
La detección de ruidos repetitivos cíclicamente y la construcción de trazas de movimiento de la AP requieren la acumulación de información del sonar durante decenas de minutos, lo que ralentiza considerablemente la detección y clasificación de objetos bajo el agua. Las características distintivas mucho más inequívocas de la AP son los sonidos del agua que entra en los tanques de lastre y los sopla con aire comprimido, los torpedos que salen de los tubos de torpedos y los lanzamientos de misiles bajo el agua, y también operan el sonar del enemigo en el modo activo, que se detecta al recibir una señal directa a una distancia múltiple de una distancia que Recepción de la señal reflejada.

Además de la potencia de la radiación de ubicación, la sensibilidad de las antenas receptoras y el grado de perfección de los algoritmos para procesar la información recibida, las características del HAS están significativamente influenciadas por las condiciones hidrológicas submarinas, la profundidad del agua, la agitación de la superficie del mar, la cubierta de hielo, el relieve inferior, la presencia de interferencias de ruido de la navegación marítima, la suspensión de arena, la biomasa flotante y otros factores.
El ajuste hidrológico está determinado por la diferenciación de la temperatura y la salinidad de las capas horizontales de agua, lo que resulta en diferentes densidades. En el límite entre las capas de agua (la llamada termoclina), las ondas de sonido experimentan una reflexión total o parcial, protegiendo la PA desde arriba o debajo del gas de búsqueda ubicado. Las capas en la columna de agua se forman en el rango de profundidad de los medidores 100 a 600 y cambian su ubicación según la estación del año. La capa inferior de agua, que se estanca en los huecos del fondo marino, forma el llamado fondo líquido, que es impenetrable para las ondas sonoras (excepto para infrasonidos). Por el contrario, en la capa de agua de la misma densidad, surge un canal acústico, a través del cual las vibraciones de sonido en el rango de frecuencia media se extienden a una distancia de varios miles de kilómetros.
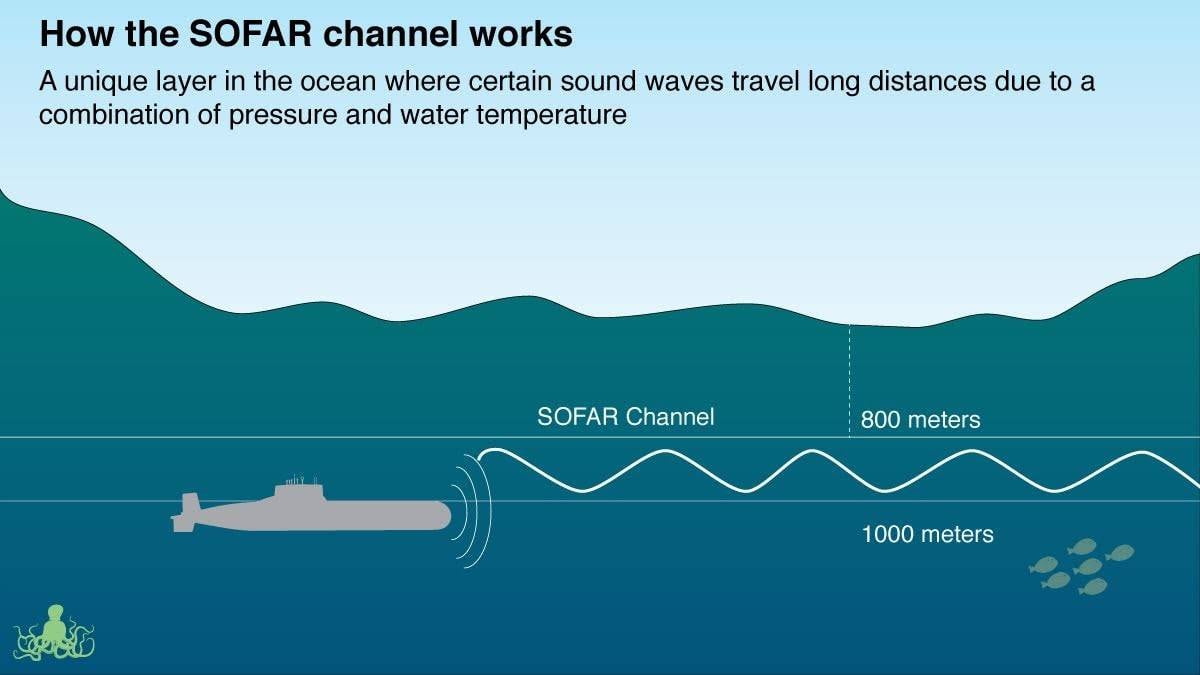
Estas características de la propagación de ondas de sonido bajo el agua han determinado la elección de infrasonido y las bajas frecuencias adyacentes a 1 KHz como el rango de trabajo principal de HAS para barcos de superficie, submarinos y estaciones de fondo.
Por otro lado, el secreto de la AP depende de las decisiones de diseño de sus mecanismos, motores, propulsión, disposición y revestimiento del casco a bordo, así como la velocidad del curso bajo el agua.
El motor más óptimo.
La reducción del nivel de ruido del PA en primer lugar depende de la potencia, el número y el tipo de propulsión. La potencia es proporcional al desplazamiento y la velocidad del PA. Los submarinos modernos están equipados con un solo cañón de agua, cuya radiación acústica está protegida de los ángulos de rumbo nasales por el cuerpo del submarino, desde las esquinas de los laterales, por la carcasa del chorro de agua. El área de audibilidad está limitada a ángulos de curso de popa estrechos. La segunda solución de diseño más importante dirigida a reducir el ruido intrínseco de la PA es el uso de un cuerpo con forma de cigarro con un grado óptimo de elongación (unidades 8 para nodos de velocidad ~ 30) sin superestructuras y protuberancias superficiales (excepto para cortes) con mínima turbulencia.
El motor más óptimo en términos de minimizar el ruido de un submarino no nuclear es un motor eléctrico de propulsión directa / propulsión por chorro de agua, ya que el motor eléctrico de CA genera ruido con una frecuencia de corriente en el circuito (50 Hz para submarinos domésticos y 60 Hz para submarinos estadounidenses). El peso específico del motor eléctrico de baja velocidad es demasiado grande para proporcionar un accionamiento directo a la velocidad máxima, por lo tanto, en este modo, el par debe transmitirse a través de una caja de engranajes de múltiples etapas que genera un ruido cíclico característico. En este sentido, el modo de bajo ruido del movimiento electromotor completo se realiza cuando la caja de engranajes se apaga con una limitación en la potencia del motor eléctrico y la velocidad de desplazamiento del PA (a nivel de los nodos 5-10).
Los submarinos tienen sus propias características para la implementación del modo de propulsión totalmente eléctrica: además del ruido de la caja de engranajes a baja velocidad, también es necesario excluir el ruido de la bomba de circulación del refrigerante del reactor, la bomba para bombear el fluido de trabajo de la turbina y la bomba de alimentación de agua de mar para enfriar el fluido de trabajo. La primera tarea se resuelve transfiriendo el reactor a la circulación natural del refrigerante o utilizando un líquido refrigerante metálico con una bomba MHD, la segunda tarea es mediante el uso del fluido de trabajo en el estado supercrítico de agregación y una turbina / compresor de un solo rotor de un ciclo cerrado, la tercera utilizando la presión del flujo de agua incidente.

El ruido generado por los mecanismos a bordo se minimiza mediante el uso de amortiguadores activos que funcionan en antifase con oscilaciones de los mecanismos. Sin embargo, el éxito inicial logrado en esta dirección a fines del siglo pasado tuvo serias limitaciones para su desarrollo por dos razones:
- la presencia de grandes volúmenes de aire de resonador dentro de los cascos de los submarinos para asegurar la vida de la tripulación;
- colocación de mecanismos a bordo en varios compartimentos especializados (residencial, de comando, reactor, máquina), que no permite agregar mecanismos en un solo cuadro en contacto con el casco submarino en un número limitado de puntos a través de amortiguadores activos controlados conjuntamente para eliminar el ruido de modo común.
Este problema se resuelve solo cambiando a vehículos subacuáticos no tripulados de pequeño tamaño sin volúmenes de aire internos con agregación de energía y equipos auxiliares en un solo cuadro.
Además de reducir la intensidad de la generación del campo de ruido, las soluciones constructivas deberían reducir la probabilidad de detección de PA utilizando la radiación de ecolocación del HAS.
Contrarrestación a medios hidroacústicos.
Históricamente, la primera forma de contrarrestar las herramientas de búsqueda de sonar activas era aplicar un revestimiento de goma grueso en la superficie de un casco submarino, utilizado por primera vez en los "robots eléctricos" Kriegsmarine al final de la Segunda Guerra Mundial. El revestimiento elástico absorbió en gran medida la energía de las ondas de sonido de la señal de ubicación, y por lo tanto, la potencia de la señal reflejada fue insuficiente para detectar y clasificar el submarino. Después de adoptar un submarino nuclear con una profundidad de inmersión de varios cientos de metros, se reveló el hecho de la compresión de un recubrimiento de caucho por la presión del agua con la pérdida de propiedades de absorción de energía de las ondas de sonido. La introducción de varios rellenos en el recubrimiento de caucho, que disipa el sonido (modelado en el recubrimiento ferromagnético de los aviones, que dispersan las emisiones de radio) eliminó parcialmente este defecto. Sin embargo, la expansión del rango de frecuencias de trabajo del gas en el área de infrasonido ha trazado una línea bajo las posibilidades de usar un revestimiento absorbente / disipador como tal.
La segunda forma de contrarrestar las herramientas de búsqueda hidroacústica activa es un recubrimiento activo de capa delgada del cuerpo, que genera oscilaciones en antifase con la señal eclotacional de GUS en un amplio rango de frecuencias. Al mismo tiempo, un revestimiento de este tipo, sin costo adicional, resuelve el segundo problema, reduciendo a cero el campo acústico residual del propio ruido del AP. Se utiliza una película de fluoropolímero piezoeléctrico como material de recubrimiento de capa fina, cuyo uso se ha probado como la base de las antenas HAS. En este momento, el factor limitante es el precio del recubrimiento de un casco submarino con una gran área de superficie, por lo que los objetivos principales para su uso son los vehículos submarinos deshabitados.
El último método conocido para contrarrestar las herramientas activas de búsqueda de sonar es reducir el tamaño del PA para reducir el llamado. Fuerzas objetivo: dispersión superficial efectiva de la señal de ecolocación del sonar. La posibilidad de usar PA más compactos se basa en una revisión de la nomenclatura de armamentos y una reducción en el número de tripulaciones hasta la completa deshabitación de los vehículos. En este último caso, y como guía, el tamaño de la tripulación en personas 13 de un moderno barco de contenedores Emma Mærsk con un desplazamiento de 170 mil toneladas puede servir.
Como resultado, la fuerza del objetivo puede reducirse en uno o dos órdenes de magnitud. Un buen ejemplo es la dirección de mejorar el submarino. flota:
- implementación de los proyectos “Status-6” (“Poseidon”) y XLUUVS (Orca);
- desarrollo de proyectos del submarino “Laika” y SSN-X con misiles de crucero de mediano alcance a bordo;
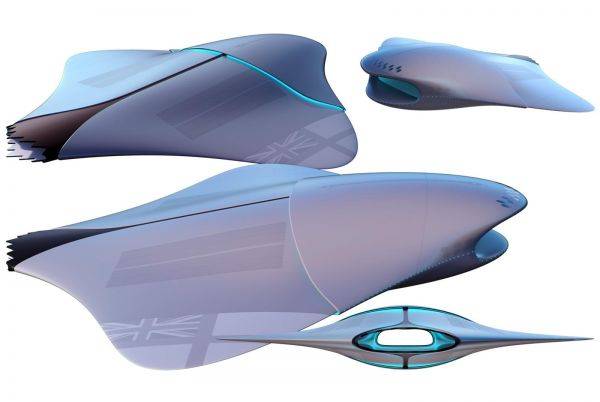
- Desarrollo de proyectos avanzados de NLA biónicos equipados con propulsión a chorro conforme con control de vector de empuje.
Tácticas de defensa antisubmarina.
El nivel de sigilo de los vehículos subacuáticos está muy influenciado por las tácticas de uso de las defensas antisubmarinas y las tácticas contrarias de la Autoridad Palestina.

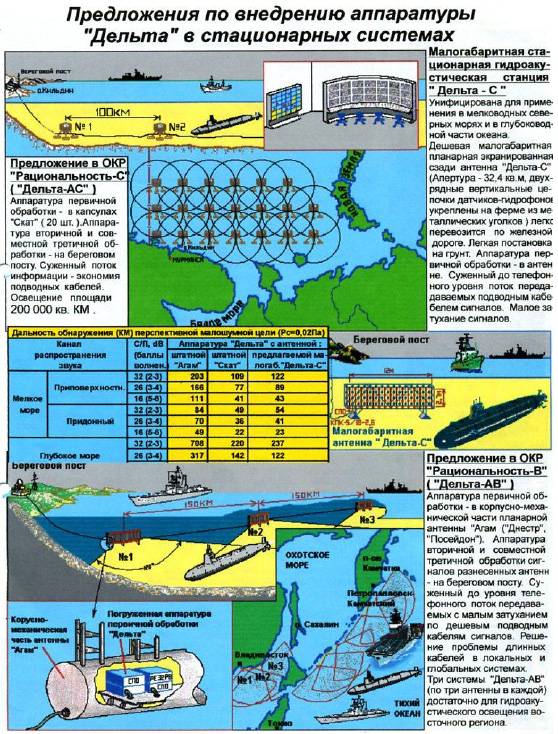
Los medios de la OLP incluyen principalmente sistemas estacionarios para la revisión de condiciones submarinas como el SOSUS estadounidense, que incluye las siguientes líneas de defensa:
- Cabo Norte del Cabo de la Península Escandinava - Isla Bear en el Mar de Barents;
- Groenlandia - Islandia - Islas Feroe - Islas británicas en el Mar del Norte;
- Costas atlánticas y pacíficas de América del Norte;
- Islas hawaianas y la isla de Guam en el Pacífico.
El rango de detección de submarinos de cuarta generación en áreas de aguas profundas fuera de la zona de convergencia es del orden de 500, en aguas poco profundas, del orden de 100 km.
Durante el movimiento bajo el agua, la AP se ve obligada de vez en cuando a ajustar su profundidad real de viaje en relación con la dada debido a la naturaleza de empuje del efecto de propulsión en el casco del vehículo submarino. Las oscilaciones verticales resultantes del cuerpo generan lo que se denomina. Onda gravitacional de superficie (PGW), cuya longitud alcanza varias decenas de kilómetros a una frecuencia de varios hercios. El PRT, a su vez, modula el ruido del sonar de baja frecuencia (la llamada luz de fondo) generado en áreas de navegación marítima intensiva o el paso de un frente de tormenta ubicado a miles de kilómetros de la ubicación de la AP. En este caso, el rango de detección máximo de un submarino que se mueve a velocidad de crucero con la ayuda de FOSS aumenta a 1000 km.
La precisión de la determinación de las coordenadas de los objetivos utilizando el FOSS en el rango máximo es una elipse del tamaño de 90 en 200 km, lo que requiere una exploración adicional de los objetivos remotos por parte de las aeronaves básicas antisubmarinas equipadas con magnetómetros a bordo lanzados por boyas de sonar y torpedos de aeronaves. La precisión de la determinación de las coordenadas de los objetivos dentro de 100 km desde la línea antisubmarina FOSS es bastante suficiente para el uso de torpedos de cohetes del rango costero y naval apropiado.
Los barcos antisubmarinos de superficie, equipados con antenas GAS remolcadas, bajadas y remolcadas, tienen un rango de detección de submarinos de cuarta generación que viajan a los nodos 5-10, no más de 25 km. La presencia a bordo de barcos de helicópteros de cubierta con antena baja GAS extiende la distancia de detección a 50 km. Sin embargo, el uso de sistemas de energía a bordo está limitado por la velocidad de los barcos, que no debe exceder los nodos 10 debido a la ocurrencia de un flujo anisotrópico alrededor de la antena de gancho y la rotura de los cables-cables de las antenas bajadas y remolcadas. Lo mismo se aplica al caso de la excitación del mar con una fuerza de más de puntos 6, lo que también nos obliga a abandonar el uso de helicópteros de cubierta con una antena baja.
Un esquema táctico efectivo para proporcionar defensa antisubmarina de barcos de superficie que van a una velocidad económica de nudos 18 o en condiciones de olas en el punto 6 del mar es la formación de un grupo de barcos con la inclusión de un equipo especializado de iluminación subacuática equipado con un potente lanzador. De lo contrario, los buques de superficie deberían retirarse bajo la protección del FOSS costero y la aviación antisubmarina básica, sin depender de las condiciones climáticas.
Un esquema táctico menos efectivo para proporcionar defensa antisubmarina de barcos de superficie es la inclusión de un grupo de barcos submarinos, cuya operación de GAS a bordo no depende de la agitación de la superficie del mar y su propia velocidad (dentro de los nudos de 20). En este caso, el GAS del submarino debe operar en el modo de detección de ruido debido a que el múltiplo excede la distancia de detección de la señal de ecolocación sobre la distancia de recepción de la señal reflejada. Según datos de la prensa extranjera, el rango de detección de un submarino nuclear de cuarta generación en estas condiciones es del orden de 25 km, el rango de detección de un submarino no nuclear es 5 km.
El uso contrario de los submarinos de ataque incluye las siguientes formas de aumentar su secreto:
- distancia de separación entre ellos y el objetivo en una cantidad que exceda el alcance de la acción del GAS FOSS, los buques de superficie y los submarinos que participan en la defensa antisubmarina, utilizando los medios apropiados. armas;
- superar las líneas de FOSS con la ayuda del paso bajo la quilla de los buques de superficie y los buques para la posterior operación libre en el área de agua, que no está iluminada por instalaciones hidroacústicas enemigas;
- Uso de características de hidrología, topografía de fondo, ruido de envío, sombra de sonar de objetos hundidos y revestimiento del submarino en suelo líquido.
El primer método asume la presencia de una designación de objetivo externa (generalmente satelital) o un ataque de un objetivo estacionario con coordenadas conocidas, el segundo método es aceptable solo antes del inicio de un conflicto militar, el tercer método se implementa dentro de la profundidad de trabajo del submarino y su equipo con un sistema de toma de agua superior para enfriar la central eléctrica o eliminación de calor directamente a la carcasa de PA.
Estimación del nivel de secreto hidroacústico.
En conclusión, es posible evaluar el nivel del secreto hidroacústico del arma estratégica estratégica Poseidon en relación con el secreto del submarino de cenizas Yasen:
- El área de superficie del ABO 40 es menos veces;
- la potencia de la unidad de potencia NPA es 5 menos;
- La profundidad de trabajo de la inmersión de la NLA en tiempos 3.
- recubrimiento fluoroplástico de la carcasa contra el recubrimiento de goma;
- agregación de los mecanismos NLA en un solo marco contra el espaciado de los mecanismos NPS en compartimentos individuales;
- movimiento eléctrico completo del ABO a baja velocidad con el apagado de todos los tipos de bombas contra el movimiento eléctrico completo de los submarinos a baja velocidad sin apagar las bombas de condensado y la entrada de agua para enfriar el fluido de trabajo.
Como resultado, la distancia de detección del Poseidon NLA que se mueve a una velocidad de los nodos 10 utilizando GUS moderno instalado en cualquier tipo de portadora y que opera en todo el rango de ondas de sonido en los modos de localización y ecolocación será menor que 1 km, lo que obviamente no es suficiente para evitar ataques contra un objetivo costero estacionario (teniendo en cuenta el radio de destrucción por una onda de choque de una explosión de un LBU especial), pero también para proteger la fuerza de ataque basada en el portador cuando viaja a las aguas, cuya profundidad supera los 1 km.
información