Defensa antisubmarina: barcos contra submarinos. Hidroacústica

Los buques de combate de superficie siguen siendo un medio crítico de guerra antisubmarina. En la foto: el submarino italiano ITS Salvatore Todaro (S 526) y la fragata canadiense HMCS Fredericton (FFH 337) durante los ejercicios de la OTAN Dynamic Manta, 24 de febrero de 2020. Foto: Noticias de USNI
Existe la opinión de que los buques de superficie son extremadamente vulnerables contra los submarinos. Esto no es del todo cierto. Además, aunque en la guerra moderna en el mar, se supone que los submarinos destruyen principalmente los buques de superficie, en el pasado, cuando la confrontación naval se reducía a la superficie de combate flota con el submarino, ganó la flota de superficie. Y el factor clave de éxito en todos los casos fue la detección sonar de submarinos.
principio
Temprano en la mañana del 22 de septiembre de 1914, tres cruceros blindados británicos del tipo Kressi patrullaron en el mar cerca del puerto de Hook Van Holland en la costa de los Países Bajos. Los barcos se movieron a lo largo de la línea del frente en un curso de 10 nodos, en línea recta, manteniendo una distancia de 2 millas de un barco a otro, sin zigzags antisubmarinos.
A las 6.25, se produjo una poderosa explosión en el babor del crucero "Abukir". El barco perdió velocidad, las máquinas de vapor a bordo (por ejemplo, los cabrestantes para lanzar botes salvavidas) se desconectaron. Después de un tiempo, se emitió una señal en un barco que se hundía, prohibiéndole a otros barcos acercarse a él, pero el comandante del segundo crucero, el Hog, lo ignoró y se apresuró a salvar a sus camaradas. Por un momento, los marineros de Hoga vieron un submarino alemán en la distancia, que surgió después de que el torpedo fue disparado debido a su peso fuertemente reducido, pero desapareció en el agua allí mismo.
A las 6.55, también se escuchó una poderosa explosión en el babor del Hog. Inmediatamente después de él sucedió otra cosa: detonó parte de la munición de proyectiles de artillería de 234 mm a bordo. El barco comenzó a hundirse y después de 10 minutos se hundió. En este momento, "Abukir" ya se ha hundido.
El tercer crucero "Cressi" fue al rescate de marineros ahogados del otro lado. Un periscopio de un submarino alemán se observó desde su lado y abrió fuego contra él. Los británicos incluso pensaron que lo habían hundido. Pero a las 7.20 del lado del "Cressi" también se produjo una poderosa explosión. Sin embargo, el barco que siguió a él permaneció a flote, y a las 7.35 fue terminado por el último torpedo.
Los tres cruceros fueron hundidos por un submarino alemán U-9 bajo el mando del Capitán Teniente Otto Veddigen. El viejo submarino, construido en 1910, que tenía características extremadamente modestas para 1914 y solo cuatro torpedos enviados a los tres últimos, incluso anticuados, pero todavía barcos listos para el combate en menos de una hora y media y se dejó intacto.

Cartel de propaganda alemana de 1914 que representa el ataque U-9
Entonces en el mundo comenzó la era de la guerra submarina. Hasta este día, los submarinos eran considerados por muchos comandantes navales como una especie de circo en el agua. Después, ya no, y ahora este "ya no" fue para siempre. Pronto, Alemania continuará a una guerra submarina ilimitada, y sus submarinos continuarán siendo utilizados contra los buques de superficie Entente, a veces con efectos mortales, como el U-26, que ahogó al crucero ruso Pallada en el Báltico, en el que toda la tripulación murió en la detonación de municiones en 598 la persona
Unos años antes del final de la guerra, los ingenieros de la Entente comenzaron a acercarse a las herramientas de detección de submarinos. A finales de mayo de 1916, los inventores Shilovsky y Langevin presentaron una solicitud conjunta en París para "un dispositivo para la detección remota de obstáculos bajo el agua". Paralelamente, se llevó a cabo un trabajo similar (bajo el código condicional ASDIC) en una atmósfera de profundo secreto en el Reino Unido bajo el liderazgo de Robert Boyle y Albert Wood. Pero el primer tipo de sonda ASDIC Tipo 112 entró en servicio con la Armada británica después de la guerra.
Después de pruebas exitosas en 1919, en 1920, este modelo de sonda se pone en serie. Varios instrumentos avanzados de este tipo fueron los principales medios para detectar submarinos durante la Segunda Guerra Mundial. Fueron ellos quienes "eliminaron" las batallas de los barcos de escolta contra los submarinos alemanes.
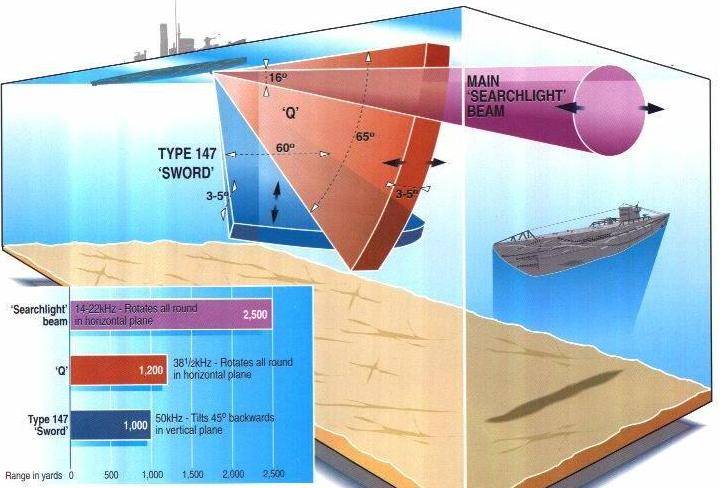
Área de visualización Tipo ASDIC Tipo 144Q (1942)
En 1940, los británicos transfirieron su tecnología a los estadounidenses, que tenían un programa serio de investigación acústica, y pronto aparecieron equipos de sonar en buques de guerra estadounidenses.
Los Aliados pasaron la Segunda Guerra Mundial con precisamente ese sonar.
La primera generación de equipos de sonar de posguerra
La dirección principal del desarrollo de estaciones hidroacústicas en los primeros años de posguerra de buques de superficie fue la integración con armas (sistemas de control de incendios de bombas de chorro profundo y torpedos), con un ligero aumento en el rendimiento del nivel alcanzado durante la Segunda Guerra Mundial (por ejemplo, SAS SQS-4 en destructores Forest Sherman ").
Un fuerte aumento en las características de los ASG requirió una gran cantidad de trabajo de investigación y desarrollo (I + D) que se había llevado a cabo de manera intensiva desde los años 50, pero en los modelos en serie de ASG ya se implementaron en barcos de la segunda generación (comisionados desde principios de los años 60) .
Cabe señalar que los GAS de esta generación fueron de alta frecuencia y permitieron la búsqueda eficiente de submarinos (dentro de sus características), incluyendo en aguas poco profundas, o incluso tirado en el suelo.
En la URSS en ese momento, tanto la prometedora I + D como el desarrollo activo de la experiencia angloamericana y alemana y las bases científicas y técnicas de la Segunda Guerra Mundial estaban sucediendo para la creación de GAS doméstico de la primera generación de barcos de posguerra, y el resultado fue bastante digno de trabajo.
En 1953, la Planta Taganrog, ahora conocida como "Surf", y luego solo "Mailbox No. 32", lanzó el primer GAS completo "Tamir-11". Según sus características de rendimiento, correspondía a los mejores ejemplos de tecnología occidental al final de la Segunda Guerra Mundial.
En 1957, se adoptó el Hércules Hércules, que se instaló en barcos de varios proyectos, que por sus características ya era comparable al American SAS SQS-4.
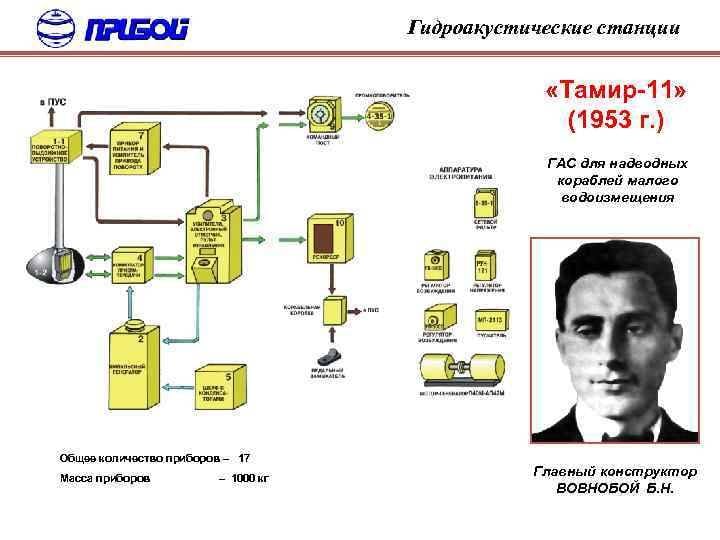
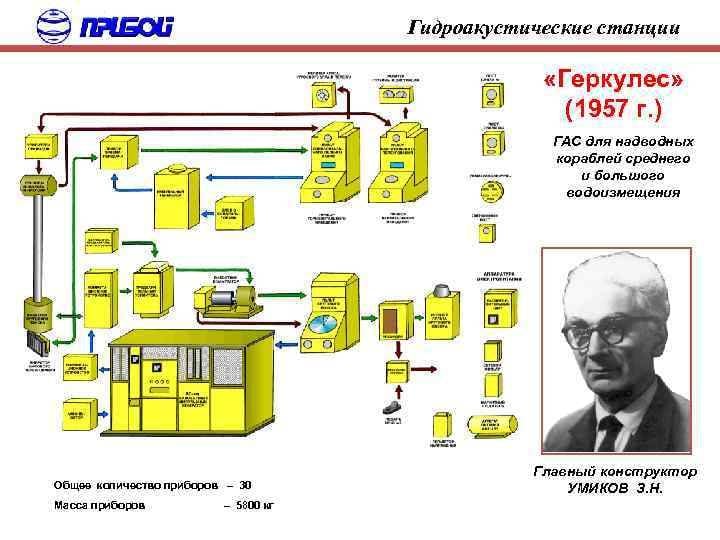
Esquemas del GAS soviético de posguerra y retratos de los principales diseñadores.
Por supuesto, la efectividad del uso de ASG en entornos marinos difíciles dependía directamente de la capacitación del personal, y la experiencia ha demostrado que, en manos capaces, los buques con tales ASU podrían contrarrestar efectivamente incluso los últimos submarinos nucleares.
Como ilustración de las capacidades del GAS de la primera generación de posguerra, damos un ejemplo de una búsqueda de un submarino estadounidense por parte de barcos soviéticos.
Del artículo cap. 2 rangos Yu.V. Kudryavtseva, comandante de la 114ª brigada de barcos OVR y cap. 3 rangos de AM Sumenkov, comandante de la 117 División de la OLP de la 114 Brigada OVR:
21-22 de mayo de 1964 buque grupo de ataque antisubmarino (KPUG) 117 dk PLO 114 bq OVR KVF Pacific Fleet como parte de MPK-435, MPK-440 (proyecto 122 bis), MPK-61, MPK-12. MPK-11 (pr.201-M), bajo el mando del comandante de la 117 División de OLP, ha perseguido durante mucho tiempo un submarino nuclear extranjero, durante este tiempo, los barcos viajaron 2186 millas a una velocidad promedio de 9,75 nudos. y perdió contacto a 175 millas de la costa.
Para evadir los barcos, el barco cambió 45 veces su velocidad de 2 a 15 nudos, giró 23 veces en un ángulo de más de 60 °, describió cuatro circulaciones completas y tres circuitos del tipo G11. lanzó 6 simuladores móviles y 11 estacionarios, 13 cortinas de gas, 11 veces creó interferencia de avistamiento con sonares de barcos con luz de registros. Durante la persecución, se observó tres veces el funcionamiento de los medios UZPS y el funcionamiento del barco GAS en modo activo. No fue posible observar con precisión los cambios en la profundidad de la inmersión, ya que los barcos que lo persiguen estaban equipados con el GAS Tamir-11 y MG-XNUMX sin una ruta vertical, pero a juzgar por un signo indirecto, el rango de contacto confiable, la profundidad de viaje también varió ampliamente. .
Para evadir los barcos, el barco cambió 45 veces su velocidad de 2 a 15 nudos, giró 23 veces en un ángulo de más de 60 °, describió cuatro circulaciones completas y tres circuitos del tipo G11. lanzó 6 simuladores móviles y 11 estacionarios, 13 cortinas de gas, 11 veces creó interferencia de avistamiento con sonares de barcos con luz de registros. Durante la persecución, se observó tres veces el funcionamiento de los medios UZPS y el funcionamiento del barco GAS en modo activo. No fue posible observar con precisión los cambios en la profundidad de la inmersión, ya que los barcos que lo persiguen estaban equipados con el GAS Tamir-11 y MG-XNUMX sin una ruta vertical, pero a juzgar por un signo indirecto, el rango de contacto confiable, la profundidad de viaje también varió ampliamente. .
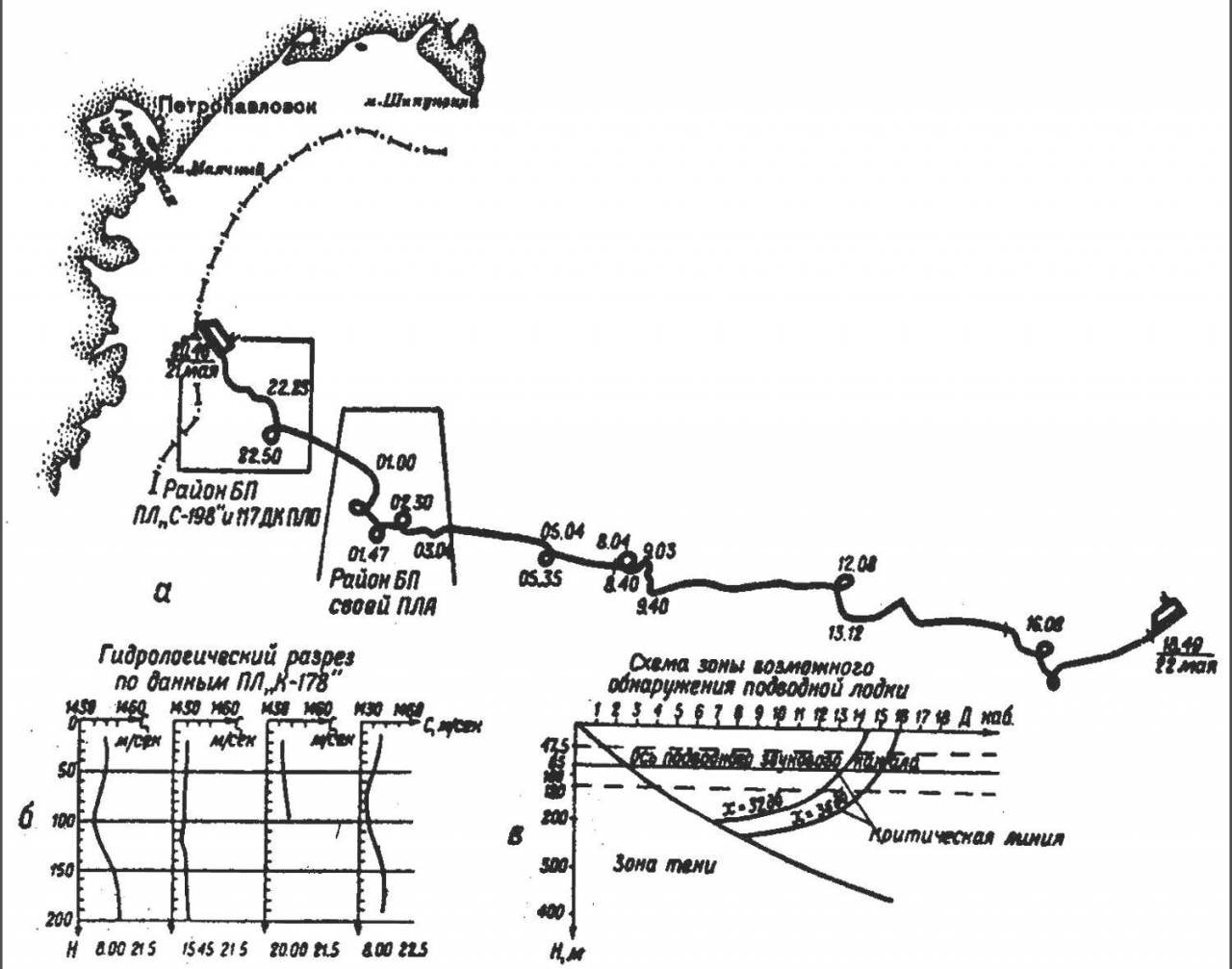
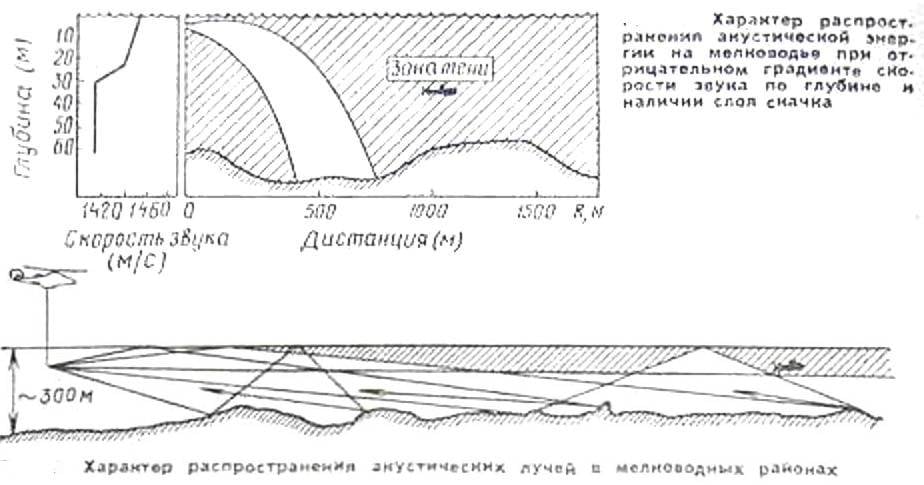
La búsqueda del submarino "Snook" KPUG 117 dk PLO 114 bk OVR. Una sección hidrológica se encuentra en la parte inferior izquierda, y la zona de detección de submarinos GAS estimada para barcos calculada sobre la base está a la derecha.
Todo el artículo con los esquemas de persecución, maniobras de combate y construcción de una orden de OLP aquí, muy recomendable para todos los interesados en el tema.
Vale la pena prestar atención a esto: el artículo describe cómo un submarino estadounidense intentó repetidamente esconderse de la persecución con la ayuda de una cortina de gas, pero aun así falló. Sin embargo, vale la pena centrarse en esto: las cortinas de gas fueron un medio eficaz para evadir el GAS de primera generación. La señal de alta frecuencia con todas sus ventajas no daba una imagen clara cuando se trabajaba "a través" del velo. Lo mismo se aplica a la situación cuando el bote mezcla intensamente el agua con maniobras bruscas. En este caso, incluso si el CEO lo detecta, entonces aplique оружие Según sus datos, no funciona: el telón, sea lo que sea, impide la determinación de los elementos del movimiento del objetivo: velocidad y rumbo. Y a menudo el bote se perdía. Un ejemplo de tal evasión está bien descrito en las memorias del Almirante A.N. Lutsky
Nuevos buques antisubmarinos pequeños (MPC) llegaron a la próxima brigada OVR. El comandante de la brigada local, supuestamente, nos dijo a los nuestros que ahora los barcos ahora no pueden escapar de ellos. Discutido Y de alguna manera llama al comandante de la brigada, establece la tarea: ocupar el área de BP, frente al IPC para zambullirse, separarse, en cualquier caso, no dejar que se siga a sí mismo durante más de 2 horas continuamente con un tiempo de búsqueda total de 4 horas.
Vinimos a la zona. Cuatro IPC ya están en el área, esperando. Nos acercamos a la comunicación de "voz", estipulamos las condiciones. IPC se retiró a 5 cables, rodeados por todos los lados. ¡Ahora, diablos, acordamos que se moverían por 10 kb! Sí, está bien ... Veamos cómo digerir lo casero. En la publicación central, un conjunto de IP (cartuchos de imitación hidreactiva - ed.) Y algo más fue preparado para la producción ...
- alerta de combate! ¡Párate en lugares para bucear! ¡Ambos motores avanzan en el medio! Abajo, ¿cuánto debajo de la quilla?
- El puente, debajo de la quilla de 130 metros.
- El IPC se lanzó, encendió el sonar, acompañado por el infierno ...
- Todo abajo! ¡Inmersión urgente! ... ¡La escotilla superior salió del cascarón! Contramaestre, bucear a una profundidad de 90 metros, recortar 10 grados depositados!
A una profundidad de 10 metros:
- Starpom, VIPS (lanzador para dispositivos de interferencia - ed.) - ¡Pli! ¡Ponga IPs con velocidad de disparo completa! A una profundidad de 25 metros:
- ¡Sopla rápido a la burbuja! El derecho a embarcar! Motor derecho de vuelta al medio! Contramaestre, circulación completa con los motores "rasgar" en el curso ...!
Entonces, agitando el agua desde la superficie casi hasta el suelo, coloque un curso a lo largo del hueco bajo el agua en la esquina más alejada del área de BP. Bajo una quilla de 10 m, la carrera del motor único es la "más pequeña". El chirrido de los sonares permaneció detrás de la popa en el punto de inmersión, mientras se alejaban, se hizo más y más silencioso ...
El IPC dio la vuelta en el punto de nuestra inmersión, probablemente durante casi una hora, luego se incorporaron a la línea del frente y comenzaron el peinado sistemático del área. Nosotros, aferrados al suelo, maniobramos a lo largo del borde más alejado del área. Cuatro horas después, nunca nos alcanzaron.
...
Llegó a la base. Le informo al comandante de la brigada, pero él ya lo sabe.
- ¿Qué arrojaste allí de nuevo?
- Un montón de IP.
- ...?
- Bueno, la maniobra, por supuesto.
Vinimos a la zona. Cuatro IPC ya están en el área, esperando. Nos acercamos a la comunicación de "voz", estipulamos las condiciones. IPC se retiró a 5 cables, rodeados por todos los lados. ¡Ahora, diablos, acordamos que se moverían por 10 kb! Sí, está bien ... Veamos cómo digerir lo casero. En la publicación central, un conjunto de IP (cartuchos de imitación hidreactiva - ed.) Y algo más fue preparado para la producción ...
- alerta de combate! ¡Párate en lugares para bucear! ¡Ambos motores avanzan en el medio! Abajo, ¿cuánto debajo de la quilla?
- El puente, debajo de la quilla de 130 metros.
- El IPC se lanzó, encendió el sonar, acompañado por el infierno ...
- Todo abajo! ¡Inmersión urgente! ... ¡La escotilla superior salió del cascarón! Contramaestre, bucear a una profundidad de 90 metros, recortar 10 grados depositados!
A una profundidad de 10 metros:
- Starpom, VIPS (lanzador para dispositivos de interferencia - ed.) - ¡Pli! ¡Ponga IPs con velocidad de disparo completa! A una profundidad de 25 metros:
- ¡Sopla rápido a la burbuja! El derecho a embarcar! Motor derecho de vuelta al medio! Contramaestre, circulación completa con los motores "rasgar" en el curso ...!
Entonces, agitando el agua desde la superficie casi hasta el suelo, coloque un curso a lo largo del hueco bajo el agua en la esquina más alejada del área de BP. Bajo una quilla de 10 m, la carrera del motor único es la "más pequeña". El chirrido de los sonares permaneció detrás de la popa en el punto de inmersión, mientras se alejaban, se hizo más y más silencioso ...
El IPC dio la vuelta en el punto de nuestra inmersión, probablemente durante casi una hora, luego se incorporaron a la línea del frente y comenzaron el peinado sistemático del área. Nosotros, aferrados al suelo, maniobramos a lo largo del borde más alejado del área. Cuatro horas después, nunca nos alcanzaron.
...
Llegó a la base. Le informo al comandante de la brigada, pero él ya lo sabe.
- ¿Qué arrojaste allí de nuevo?
- Un montón de IP.
- ...?
- Bueno, la maniobra, por supuesto.
En la próxima generación de GAS, se resolvió el problema de las cortinas de gas.
La segunda generación de posguerra.
Una característica clave de la segunda generación de GAS de la posguerra fue la aparición y el uso activo de un nuevo y potente GAS de baja frecuencia, con un rango de detección considerablemente mayor (un orden de magnitud) (en los Estados Unidos era SQS-23 y SQS-26). Los GAS de baja frecuencia eran insensibles a las cortinas de gas y tenían un rango de detección mucho más largo.
Destructor SQS-26 GAS Willis A. Lee, tipo "Mitcher", 1961.
Para buscar submarinos bajo el salto en los Estados Unidos, se desarrolló el SQS-13 GAS (BUGAS) de frecuencia media remolcado.

BUGAS AN / SQS-35
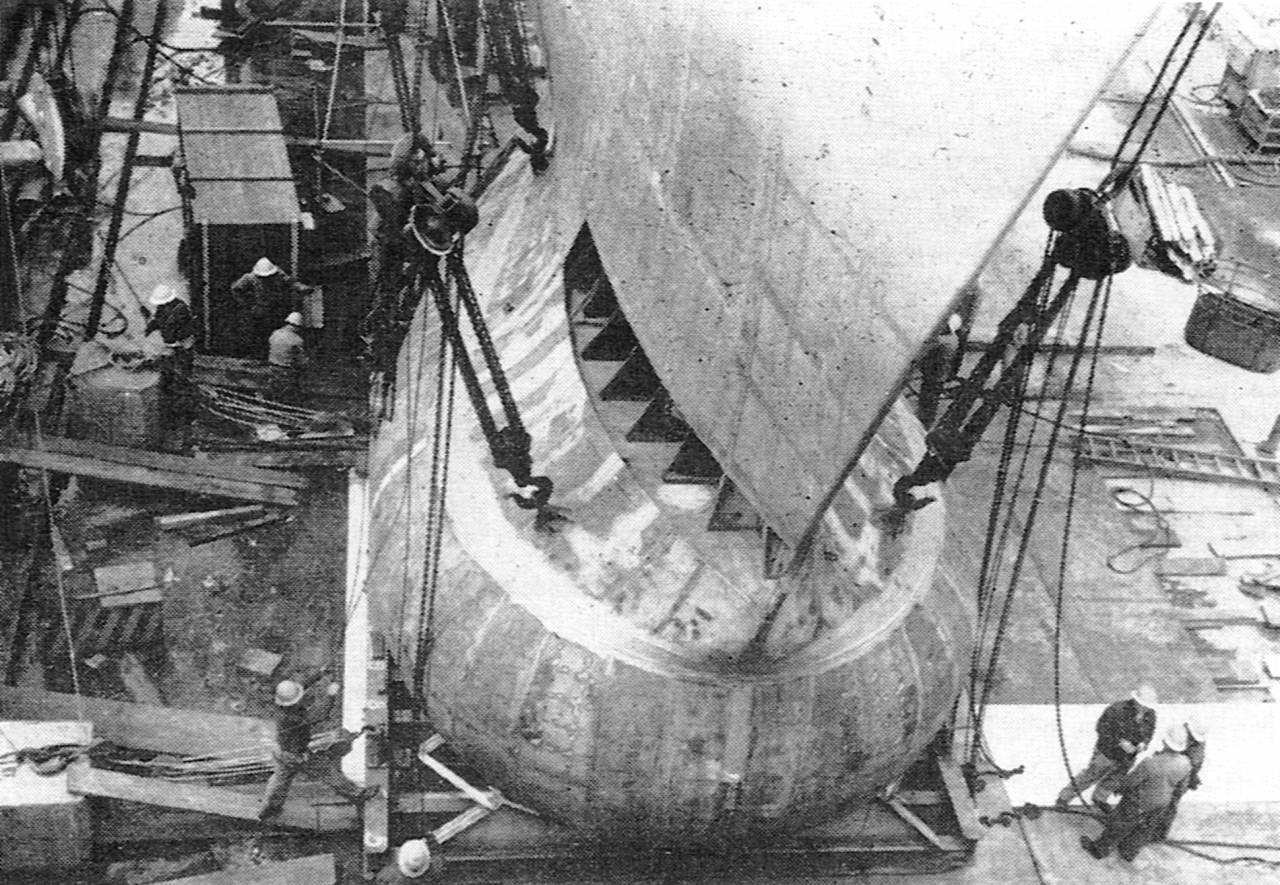
Al mismo tiempo, el alto nivel tecnológico permitió a los Estados Unidos crear GAS de baja frecuencia, adecuado para su colocación en buques de desplazamiento incluso medio, mientras que la contraparte soviética SQS-26, GAS MG-342 "Orion" cruceros antisubmarinos del proyecto 1123 y 1143 tenía una gran masa y dimensiones ( solo la antena telescópica retráctil tenía dimensiones de 21 × 6,5 × 9 metros) y no se podía instalar en barcos de la clase SKR - BOD.
Antena GAS MG-342 "Orion" en el proyecto de crucero 1123
Por esta razón, en buques de menor desplazamiento (incluido el BOD del proyecto 1134A y B, que tenía un desplazamiento "casi crucero"), se instaló un GAS "Titan-2" de frecuencia media más pequeño (con un alcance significativamente menor que sus homólogos estadounidenses) y un MG de GAS remolcado -325 Vega (a nivel de SQS-35).
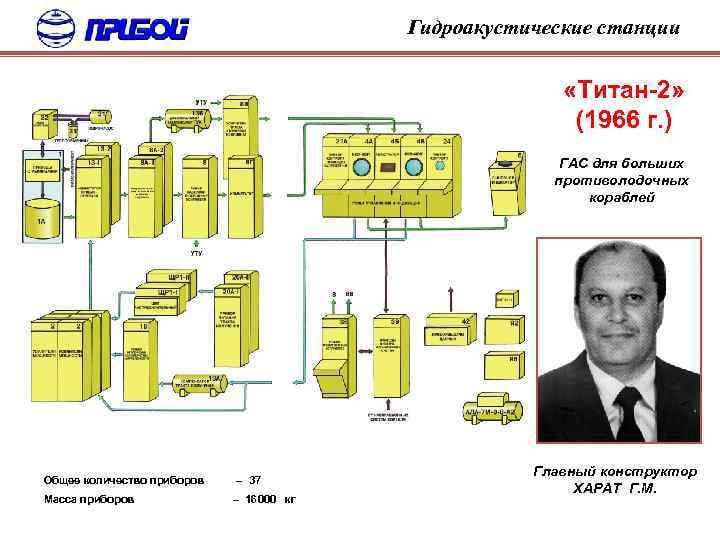
Esquema GAS "Titan-2" y su diseñador jefe.
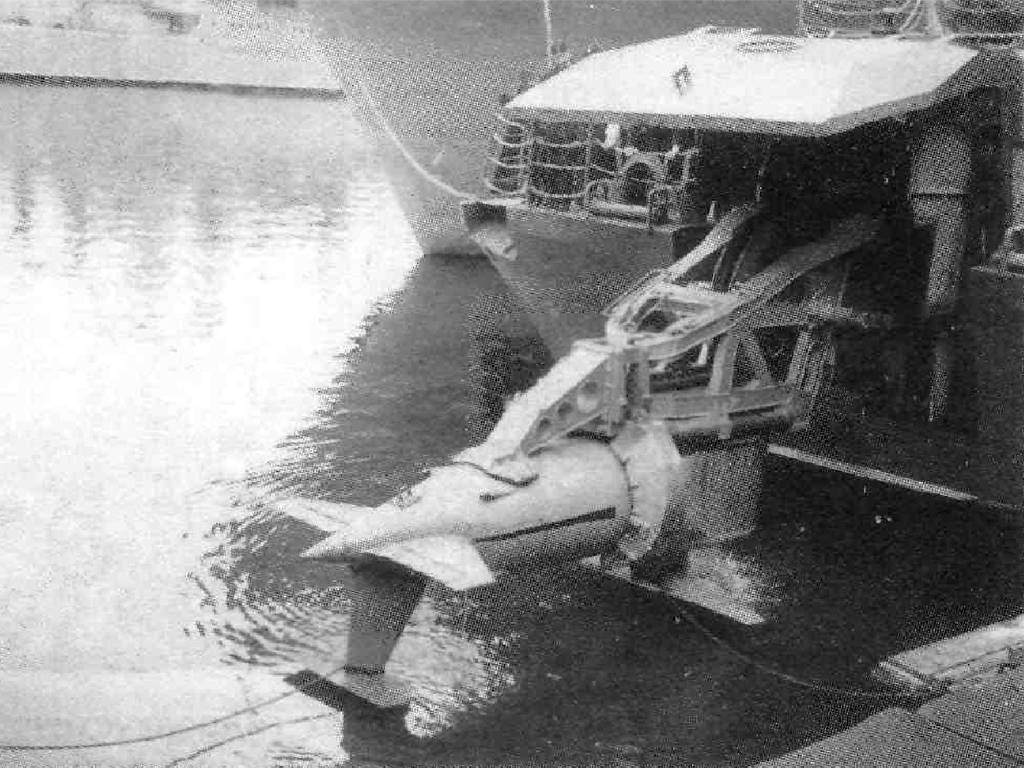
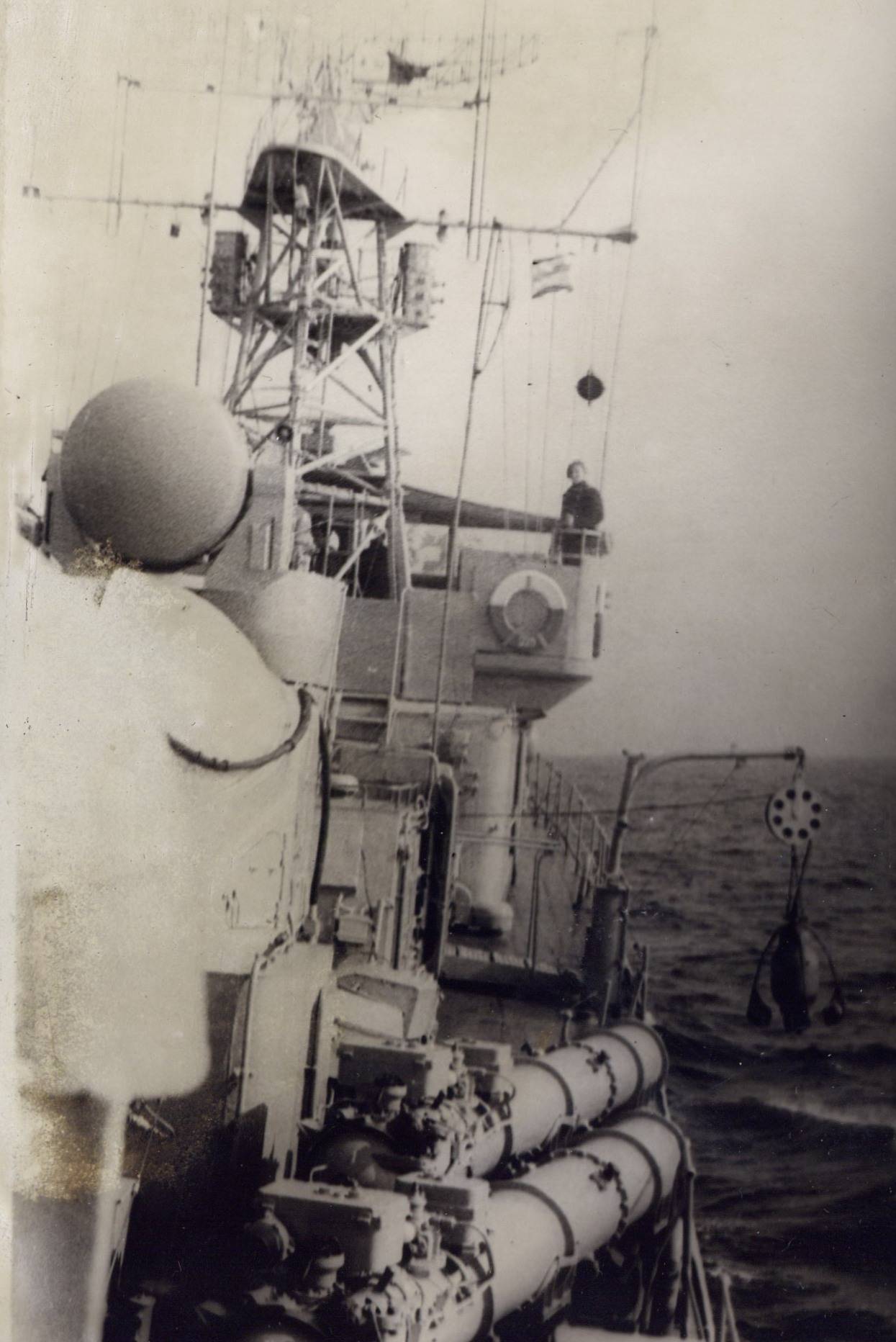
Puesta en escena BUGAS "Vega"
Más tarde, para reemplazar el GAS "Titan-2", se desarrolló completamente el complejo hidroacústico (SAC) MGK-335 "Platinum", que tenía una antena telescópica y remolcada.
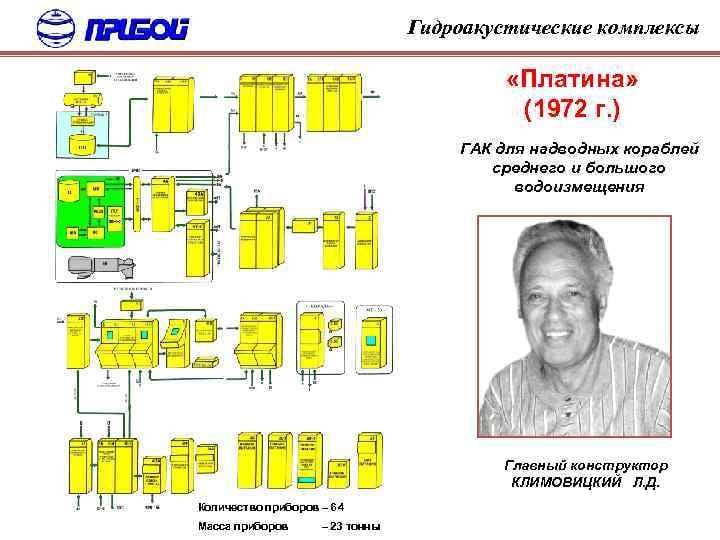
GAS "Platinum" y su diseñador jefe
Las nuevas estaciones de sonar ampliaron drásticamente las capacidades antisubmarinas de los buques de superficie, y a principios de los años sesenta del siglo pasado, los submarinistas soviéticos tuvieron que probar completamente su efectividad en sí mismos.
Citemos como ejemplo un extracto de la historia del vicealmirante A.T. Shtyrov, "Se le ordena observar el silencio por radio", sobre un intento de un submarino diesel-eléctrico de la Armada de la URSS de llegar a la distancia de usar armas en un portaaviones estadounidense. Los eventos descritos datan de mediados de los años sesenta y tuvieron lugar en el Mar del Sur de China:
- ¿Y cómo actuarás cuando descubras el trabajo de los sonares de baja frecuencia? - cómo la bardana se apoderó del representante de la flota en Neulyba.
- La instrucción desarrollada por el escuadrón regula: evadir la divergencia a una distancia de al menos 60 cables. También puedo detectar el ruido de las hélices de la estación ShPS (estación de detección de ruido) de mi barco a una distancia de unos 60 cables. Por lo tanto, habiendo descubierto la operación de GAS de baja frecuencia, debo suponer que yo mismo ya he sido detectado por el enemigo. Cómo salir de esta situación, la situación lo dirá.
- ¿Y cómo va a hacer un seguimiento de los objetos principales, estando dentro de la orden de detención?
Neulib no sabía cómo llevar a cabo tal tarea, ya que tenía buscadores de dirección de ruido con un alcance más corto que las "zonas de iluminación" de los sonares de baja frecuencia de los buques de protección de portaaviones. En silencio se encogió de hombros: "Esto se llama, y come el pescado, y no te sientes en el anzuelo".
Sin embargo, supuso: un compañero del cuartel general de la flota, un probable creador de la orden de combate, tampoco lo sabe.
Pero ese era el momento en que estaba de moda "establecer tareas" sin pensar en las posibilidades de su implementación. De acuerdo con la fórmula: "¿Qué significa que no puedo cuando la fiesta ordenó?"
...
Al final de la séptima noche, Sinitsa, el comandante del grupo de rumores OCHNAZ, había subido al puente e informó:
- Decodificación, camarada comandante. El grupo de transportistas de Ticonderoga llegó al área de Charlie ...
- Genial! Acerquémonos.
Si Neulyba podría haber previsto lo que le costaría, este vigorizante peso ligero es "excelente".
...
- El sector de la izquierda es diez - a la izquierda sesenta hay tres sonares. Las señales se amplifican! El intervalo de paquetes es un minuto, vaya periódicamente al intervalo de 15 segundos. Los ruidos no son audibles.
- alerta de combate! Sumérgete a una profundidad de treinta metros. Registro en el cuaderno de bitácora: comenzaron a acercarse a las fuerzas del AUG (grupo de ataque de portaaviones) para el reconocimiento.
- ¡Las señales de sonda se amplifican rápidamente! Meta número cuatro, Sonar Right Sixty!
"¡Oooo-oo-oo-oo! ¡Oo-oo-oo-oo-oo!" Potentes paquetes de bajo tono ahora se aprovecharon del chasis.
El astuto plan de Neulyba, deslizarse a lo largo de las fuerzas de seguridad hasta el supuesto lugar del portaaviones, resultó ser ridículo: después de media hora, el barco fue bloqueado firmemente por barcos en todos los lados del horizonte.
Maniobrando cambios abruptos en el curso, lanzamientos de velocidad de pequeños a completos, el bote llegó a una profundidad de 150 metros. Había una exigua "reserva" de profundidad: veinte metros.
¡Ay! Isotérmica en todo el rango de profundidades no impidió la operación del sonar. Los golpes de poderosos paquetes golpean el cuerpo, como mazos. Las "nubes de gas" creadas por los cartuchos de dióxido de carbono disparados por el bote parecían estar un poco avergonzados por los yanquis.
El bote se lanzó, esforzándose con lanzamientos bruscos para alejarse de los barcos más cercanos, cuyos ruidos claramente visibles ahora se deslizaban en una proximidad desagradable. El océano estaba furioso ...
Neulib y Whisper no sabían (esto se dio cuenta mucho más tarde) que las tácticas de "evasión - separación - avance" disponibles para ellos, alimentadas por las instrucciones de posguerra y las velocidades de tortuga, están irremediablemente desactualizadas e impotentes frente a la última técnica de los "malditos imperialistas" ...
- La instrucción desarrollada por el escuadrón regula: evadir la divergencia a una distancia de al menos 60 cables. También puedo detectar el ruido de las hélices de la estación ShPS (estación de detección de ruido) de mi barco a una distancia de unos 60 cables. Por lo tanto, habiendo descubierto la operación de GAS de baja frecuencia, debo suponer que yo mismo ya he sido detectado por el enemigo. Cómo salir de esta situación, la situación lo dirá.
- ¿Y cómo va a hacer un seguimiento de los objetos principales, estando dentro de la orden de detención?
Neulib no sabía cómo llevar a cabo tal tarea, ya que tenía buscadores de dirección de ruido con un alcance más corto que las "zonas de iluminación" de los sonares de baja frecuencia de los buques de protección de portaaviones. En silencio se encogió de hombros: "Esto se llama, y come el pescado, y no te sientes en el anzuelo".
Sin embargo, supuso: un compañero del cuartel general de la flota, un probable creador de la orden de combate, tampoco lo sabe.
Pero ese era el momento en que estaba de moda "establecer tareas" sin pensar en las posibilidades de su implementación. De acuerdo con la fórmula: "¿Qué significa que no puedo cuando la fiesta ordenó?"
...
Al final de la séptima noche, Sinitsa, el comandante del grupo de rumores OCHNAZ, había subido al puente e informó:
- Decodificación, camarada comandante. El grupo de transportistas de Ticonderoga llegó al área de Charlie ...
- Genial! Acerquémonos.
Si Neulyba podría haber previsto lo que le costaría, este vigorizante peso ligero es "excelente".
...
- El sector de la izquierda es diez - a la izquierda sesenta hay tres sonares. Las señales se amplifican! El intervalo de paquetes es un minuto, vaya periódicamente al intervalo de 15 segundos. Los ruidos no son audibles.
- alerta de combate! Sumérgete a una profundidad de treinta metros. Registro en el cuaderno de bitácora: comenzaron a acercarse a las fuerzas del AUG (grupo de ataque de portaaviones) para el reconocimiento.
- ¡Las señales de sonda se amplifican rápidamente! Meta número cuatro, Sonar Right Sixty!
"¡Oooo-oo-oo-oo! ¡Oo-oo-oo-oo-oo!" Potentes paquetes de bajo tono ahora se aprovecharon del chasis.
El astuto plan de Neulyba, deslizarse a lo largo de las fuerzas de seguridad hasta el supuesto lugar del portaaviones, resultó ser ridículo: después de media hora, el barco fue bloqueado firmemente por barcos en todos los lados del horizonte.
Maniobrando cambios abruptos en el curso, lanzamientos de velocidad de pequeños a completos, el bote llegó a una profundidad de 150 metros. Había una exigua "reserva" de profundidad: veinte metros.
¡Ay! Isotérmica en todo el rango de profundidades no impidió la operación del sonar. Los golpes de poderosos paquetes golpean el cuerpo, como mazos. Las "nubes de gas" creadas por los cartuchos de dióxido de carbono disparados por el bote parecían estar un poco avergonzados por los yanquis.
El bote se lanzó, esforzándose con lanzamientos bruscos para alejarse de los barcos más cercanos, cuyos ruidos claramente visibles ahora se deslizaban en una proximidad desagradable. El océano estaba furioso ...
Neulib y Whisper no sabían (esto se dio cuenta mucho más tarde) que las tácticas de "evasión - separación - avance" disponibles para ellos, alimentadas por las instrucciones de posguerra y las velocidades de tortuga, están irremediablemente desactualizadas e impotentes frente a la última técnica de los "malditos imperialistas" ...
El almirante I.M. da otro ejemplo en su libro. Capitán
... llegaron dos barcos estadounidenses: un destructor del tipo Forrest Sherman (que tenía un GAS AN / SQS-4 con un rango de detección de 30 cables) y una fragata del tipo Knox (como en el texto de I. M. Kapitanets, en realidad es simplemente "Knox" "- autor)
... establece la tarea: asegurar la inmersión de dos submarinos; Se determinaron las fuerzas para esto: tres naves de superficie y una base flotante.
El primer submarino, que fue rastreado por un destructor de la clase Forrest Sherman cuando contrarrestó nuestra base flotante y patrulla, logró salir después de 6 horas. El segundo pl, que fue observado por la fragata Friend Knox, intentó arrancarse durante 8 horas y, después de descargar la batería, salió a la superficie.
La hidrología fue el primer tipo favorable para las estaciones de sonda de podcast. Sin embargo, esperábamos con dos barcos contra un barco de EE. UU. Para retrasarlo, dificultar el seguimiento y planeamos interferir con las estaciones hidroacústicas restableciendo la regeneración.
...
por las acciones de la patrulla, nos dimos cuenta de que mantiene contacto con el submarino a una distancia de más de 100 cables ... GAS AN / SQS-26 tenía ... un rango de detección de hasta 300 cables.
... la resistencia intensa en 8 horas no produjo resultados; El submarino, habiendo consumido la energía de la batería, salió a la superficie nuevamente.
Ya no pudimos oponernos a la nueva estación de sonar, y tuvimos que ir al PC de la Armada con la propuesta de enviar un destacamento de barcos en una visita oficial planificada a Marruecos, en la que también participará un submarino.
... establece la tarea: asegurar la inmersión de dos submarinos; Se determinaron las fuerzas para esto: tres naves de superficie y una base flotante.
El primer submarino, que fue rastreado por un destructor de la clase Forrest Sherman cuando contrarrestó nuestra base flotante y patrulla, logró salir después de 6 horas. El segundo pl, que fue observado por la fragata Friend Knox, intentó arrancarse durante 8 horas y, después de descargar la batería, salió a la superficie.
La hidrología fue el primer tipo favorable para las estaciones de sonda de podcast. Sin embargo, esperábamos con dos barcos contra un barco de EE. UU. Para retrasarlo, dificultar el seguimiento y planeamos interferir con las estaciones hidroacústicas restableciendo la regeneración.
...
por las acciones de la patrulla, nos dimos cuenta de que mantiene contacto con el submarino a una distancia de más de 100 cables ... GAS AN / SQS-26 tenía ... un rango de detección de hasta 300 cables.
... la resistencia intensa en 8 horas no produjo resultados; El submarino, habiendo consumido la energía de la batería, salió a la superficie nuevamente.
Ya no pudimos oponernos a la nueva estación de sonar, y tuvimos que ir al PC de la Armada con la propuesta de enviar un destacamento de barcos en una visita oficial planificada a Marruecos, en la que también participará un submarino.
Estos ejemplos son formalmente contradictorios: las instrucciones de la brigada submarina de la Flota del Pacífico indican el rango de detección del nuevo GAS de baja frecuencia de la Marina de los EE. UU. Alrededor de 60 taxis y el Capitán (hasta 300 cabinas). En realidad, todo depende de las condiciones, y principalmente de la hidrología.
El agua es un medio extremadamente difícil para el trabajo de las herramientas de búsqueda, e incluso el medio más efectivo de búsqueda en él: las condiciones ambientales acústicas influyen mucho. Por lo tanto, tiene sentido tocar al menos brevemente este tema.
En la Armada rusa, se decidió distinguir 7 tipos principales de hidrología (con muchos de sus subtipos).
Tipo 1. Gradiente positivo de la velocidad del sonido. Generalmente hay en la estación fría.
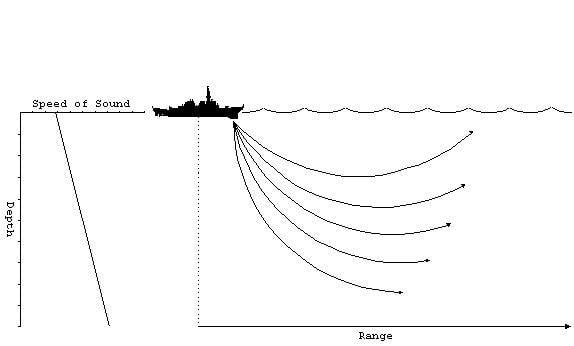
Tipo 1
Tipo 2. El gradiente positivo de la velocidad del sonido cambia a negativo a profundidades del orden de decenas de metros, que tiene lugar cuando hay un enfriamiento brusco de la superficie o de la capa cercana a la superficie. Al mismo tiempo, debajo de la "capa de salto" ("fractura" del gradiente), se forma una "zona de sombra" para los revestimientos de savia.
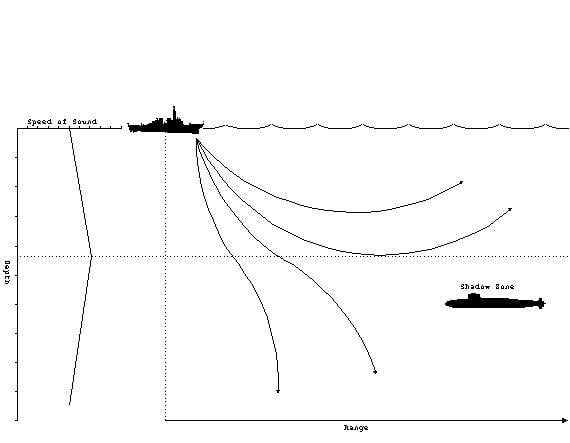
Tipo 2
Tipo 3. El gradiente positivo cambia a negativo y luego nuevamente a positivo, lo cual es típico de las regiones de los océanos en las profundidades del mar en invierno u otoño.
Tipo 4. El gradiente cambia de positivo a negativo dos veces. Tal distribución se puede observar en áreas poco profundas del océano, mar poco profundo y zona de plataforma.
Tipo 5. Una disminución en la velocidad del sonido con la profundidad, lo cual es típico en áreas poco profundas en el verano. En este caso, se forma una extensa "zona de sombra" a poca profundidad y a una distancia relativamente pequeña.
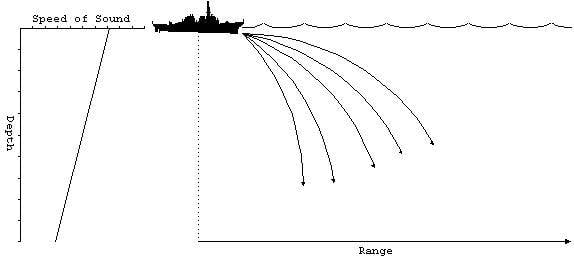
Escriba 5.
Tipo 6. El signo negativo del gradiente cambia a positivo. Este tipo de VSWR ocurre en casi todas las áreas de aguas profundas de los océanos.
Tipo 7. El gradiente negativo cambia a positivo y luego nuevamente a negativo. Esto es posible en áreas de mar poco profundo.
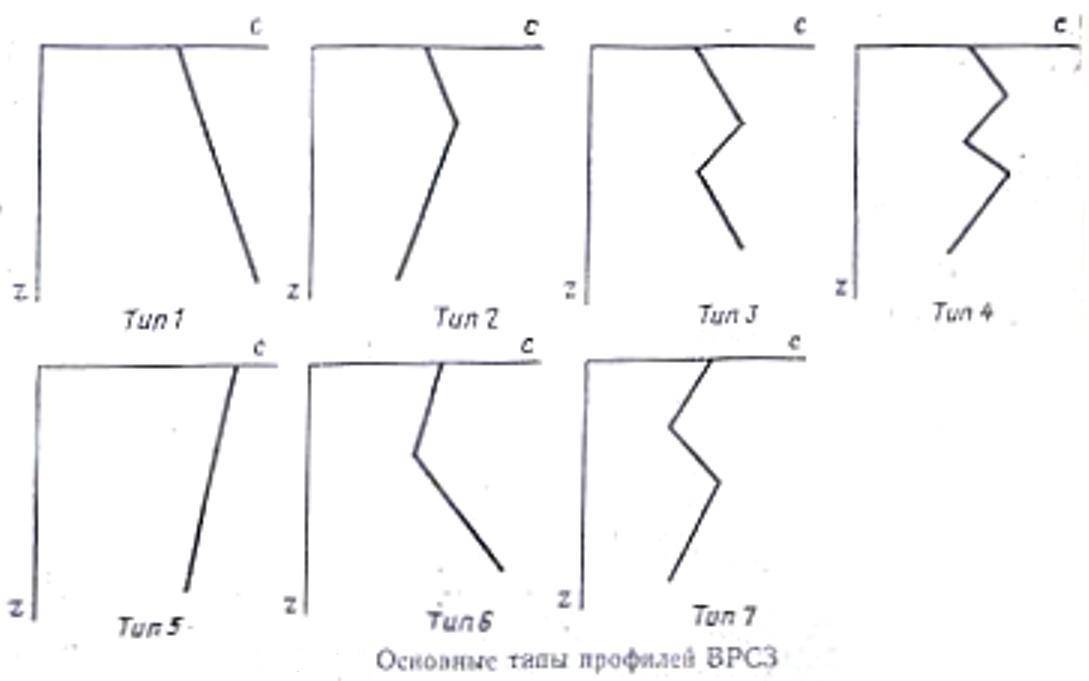
Todos los tipos juntos. Fuente: Tutorial hidroacústico de la Marina. Editorial militar, 1991
Condiciones particularmente difíciles para la propagación del sonido y la operación del GAS tienen lugar en áreas de aguas poco profundas.
La realidad del rango de detección de GAS de baja frecuencia dependía en gran medida de la hidrología, y en promedio estaban cerca de las 60 cabinas mencionadas anteriormente (con la posibilidad de un aumento significativo en condiciones hidrológicas favorables). Cabe señalar que estos rangos estaban bien equilibrados con el rango de los principales medios antisubmarinos de la Armada de los Estados Unidos: el sistema de misiles antisubmarinos Asrok (SLCM).
Al mismo tiempo, los sonares analógicos de baja frecuencia de la segunda generación de barcos de la posguerra tenían una inmunidad al ruido insuficiente (que en algunos casos nuestros submarinistas utilizaron con éxito) y tenían limitaciones significativas cuando se trabajaba a poca profundidad.
Teniendo en cuenta este factor, la generación anterior de GAS de alta frecuencia se conservó y estuvo ampliamente representada en las flotas de los EE. UU. Y la OTAN, y la Armada soviética. Además, en cierto sentido, la "reactivación" de los ASG antisubmarinos de alta frecuencia ya se ha producido a un nuevo nivel tecnológico, para los transportistas aéreos, helicópteros de barcos.
La Marina de los EE. UU. Fue la primera aquí, y los submarinistas soviéticos rápidamente apreciaron la gravedad de la nueva amenaza.
En la URSS, para el helicóptero antisubmarino Ka-25, se desarrolló el VGS-2 Oka GAS (OGAS) omitido, que, a pesar de su simplicidad, compacidad y bajo costo, resultó ser una herramienta de búsqueda muy efectiva.

La pequeña masa del Oka hizo posible no solo proporcionar una muy buena herramienta de búsqueda para nuestros pilotos de helicópteros, sino también equipar masivamente los barcos de la Armada (especialmente operando en áreas con hidrología compleja) del OGAS. El HCV-2 también se usó ampliamente en barcos fronterizos.
La versión del barco del VGS-2 "Oka" - MG-329, en el MPK pr. 204.
Por supuesto, la falta de OGAS en la versión del barco era la capacidad de buscar solo en el pie. Sin embargo, para las armas de los submarinos de la época, el barco a pie era un objetivo muy difícil. Además, los buques antisubmarinos generalmente se usaban como parte de los grupos de búsqueda y ataque de buques (KPUG), tenían sistemas de ataques grupales e intercambio de datos en submarinos detectados.
Un episodio interesante sobre el uso del Oka OGAS con características de rendimiento real es mucho más alto que los establecidos (y bajo las difíciles condiciones del Mar Báltico) está contenido en las memorias del cap. 1 rango de V. Dugints "Barco fanagoria":
... en la etapa final del ejercicio Báltico-72, el comandante en jefe también planeó controlar la vigilancia de todas las fuerzas antisubmarinas de las bases navales BF. Gorshkov dio la orden de uno de los submarinos de Kronstadt para hacer un paso secreto a través del Golfo de Finlandia, y luego a lo largo de nuestras aguas territoriales hasta Baltiysk y estableció la tarea de toda la Flota Báltica para detectar el submarino "enemigo" y destruirlo condicionalmente. El 29 de mayo, el comandante de la base expulsó de Liepaja a todas las fuerzas antisubmarinas listas para el combate en busca de un barco en el área de responsabilidad de Livmb: tres SKR y 5 MPK plancharon sus áreas asignadas durante varios días con dos grupos de búsqueda y ataque. Incluso dos submarinos 14 proporcionaron esta operación de búsqueda en áreas designadas, y en el anti-submarino diurno. aviación Be-12 también proporcionó asistencia con sus boyas y magnetómetros. En general, la mitad del mar estaba bloqueado por las fuerzas de las bases navales de Tallin, Liepaja y Baltiysk, y cada comandante soñaba con atrapar al agresor en sus redes separadas. Después de todo, esto significaba realmente capturar el verdadero prestigio del antisubmarino a los ojos del comandante en jefe de la Armada.
...
La tensión creció todos los días, no solo en los barcos, sino también en el CP KP de los comandantes de bases y todo el BF. Todos esperaban ansiosamente los resultados de este prolongado duelo de submarinistas y antisubmarineros. Para el mediodía del 31 de mayo, MPK-27 encontró contacto, lo informó alegremente, sin embargo, según todos los indicios, resultó ser una roca o roca submarina.
... al buscar, utilizaron la innovadora técnica de 'doble escala' o, más simplemente, 'trabajar a través del envío', lo que aumenta el alcance de la estación. Este truco fue desarrollado por nuestro guardiamarina divisional de acústica Alisov A. Consistió en el hecho de que, si bien el primer impulso de enviar el generador fue al agua, el siguiente envío siguiente se apagó manualmente y como resultado resultó que este primer impulso pasó y escuchó el doble de la escala de distancia.
... en el indicador apareció inesperadamente un estallido borroso de barrido a la distancia máxima, que después de algunas parcelas se convirtió en una marca real del objetivo.
- Eco-rodamiento 35, distancia 52 cable. Supongo contacto con un submarino. ¡El tono de eco está por encima del tono de reverberación!
... el silencio habitual y el aburrimiento monótono de una búsqueda en un barco explotó instantáneamente en las rampas y la cubierta del barco. ...
... la acústica mantuvo el contacto durante 30 minutos, tiempo durante el cual Slynko transmitió los datos al comandante de división, y trajo al objetivo dos IPC que tomaron contacto y atacaron el submarino.
...
La tensión creció todos los días, no solo en los barcos, sino también en el CP KP de los comandantes de bases y todo el BF. Todos esperaban ansiosamente los resultados de este prolongado duelo de submarinistas y antisubmarineros. Para el mediodía del 31 de mayo, MPK-27 encontró contacto, lo informó alegremente, sin embargo, según todos los indicios, resultó ser una roca o roca submarina.
... al buscar, utilizaron la innovadora técnica de 'doble escala' o, más simplemente, 'trabajar a través del envío', lo que aumenta el alcance de la estación. Este truco fue desarrollado por nuestro guardiamarina divisional de acústica Alisov A. Consistió en el hecho de que, si bien el primer impulso de enviar el generador fue al agua, el siguiente envío siguiente se apagó manualmente y como resultado resultó que este primer impulso pasó y escuchó el doble de la escala de distancia.
... en el indicador apareció inesperadamente un estallido borroso de barrido a la distancia máxima, que después de algunas parcelas se convirtió en una marca real del objetivo.
- Eco-rodamiento 35, distancia 52 cable. Supongo contacto con un submarino. ¡El tono de eco está por encima del tono de reverberación!
... el silencio habitual y el aburrimiento monótono de una búsqueda en un barco explotó instantáneamente en las rampas y la cubierta del barco. ...
... la acústica mantuvo el contacto durante 30 minutos, tiempo durante el cual Slynko transmitió los datos al comandante de división, y trajo al objetivo dos IPC que tomaron contacto y atacaron el submarino.
Trabajar desde la parada nos permitió tener en cuenta las condiciones de hidrología tanto como sea posible, literalmente "seleccionar todas las posibilidades" para la búsqueda de submarinos. Por esta razón, el poderoso IPC "Shelon" de OGAS del proyecto 1124, por ejemplo, de la historia de MPK-117 (Flota del Pacífico): 1974 - cuando practicaba las tareas de detectar un pl, estableció un récord de división. GAS MG-339 Shelon descubrió y sostuvo el bote dentro de un radio de 25,5 millas; 26.04.1974/1/50 - monitoreó una plaza extranjera El tiempo de contacto fue de 00.02.1975 hora. 2 minutos (según la inteligencia de la Marina de los EE. UU. apl); 10/XNUMX/XNUMX - monitoreó una plaza extranjera El tiempo de contacto fue de XNUMX horas. XNUMX minutos
A finales de los años setenta, se trazó un nuevo salto tecnológico en hidroacústica.
Tercera generación de posguerra
Una característica clave de la tercera generación de GAS de la posguerra fue la aparición y el uso activo del procesamiento digital en GAS y la introducción masiva de GAS con una antena remolcada de largo alcance en la Armada de países extranjeros: GPBA.
El procesamiento digital aumentó drásticamente la inmunidad al ruido del GAS e hizo posible operar eficientemente los sonares de baja frecuencia en condiciones difíciles y en áreas con poca profundidad. Sin embargo, el disfraz de los buques antisubmarinos occidentales se convirtió en antenas remolcadas extendidas flexibles (GPBA).
Las bajas frecuencias en el agua se propagan a distancias extremadamente largas, lo que teóricamente brinda la posibilidad de detectar submarinos a distancias muy grandes. En la práctica, el principal obstáculo para esto fue el alto nivel de ruido de fondo del océano a las mismas frecuencias, respectivamente, para la implementación de largos rangos de detección, era necesario tener emisiones separadas (en frecuencia) de "pico" de energía acústica del espectro de ruido submarino (componentes discretos - DS), y los medios apropiados para procesar la información antisubmarina, lo que le permite "extraer" estos DS "de debajo de la interferencia" y trabajar con ellos para obtener la detección de largo alcance deseada.
Además, trabajar con bajas frecuencias requería el tamaño de antenas que iban más allá de las posibilidades de colocación en el casco del barco. Entonces apareció GAS con GPBA.
La presencia de una gran cantidad de características "discretas" (señales de ruido discretas, es decir, ruidos claramente audibles a ciertas frecuencias) en submarinos soviéticos de la 1ra y 2da generación (no solo atómico, sino también diesel (!) Aseguró la alta eficiencia de GAS con GPBA. al menos, mantuvieron la eficacia en barcos de 3 generaciones que ya tenían mucho ruido al resolver el problema de la defensa antisubmarina de convoyes y unidades de buques de guerra (especialmente al mover nuestros submarinos a velocidades más altas).
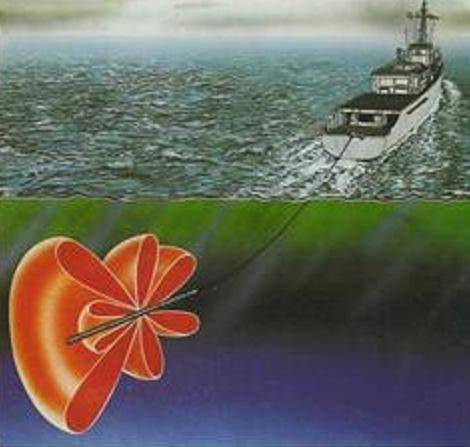
Características del patrón de directividad del GAS con GPBA.
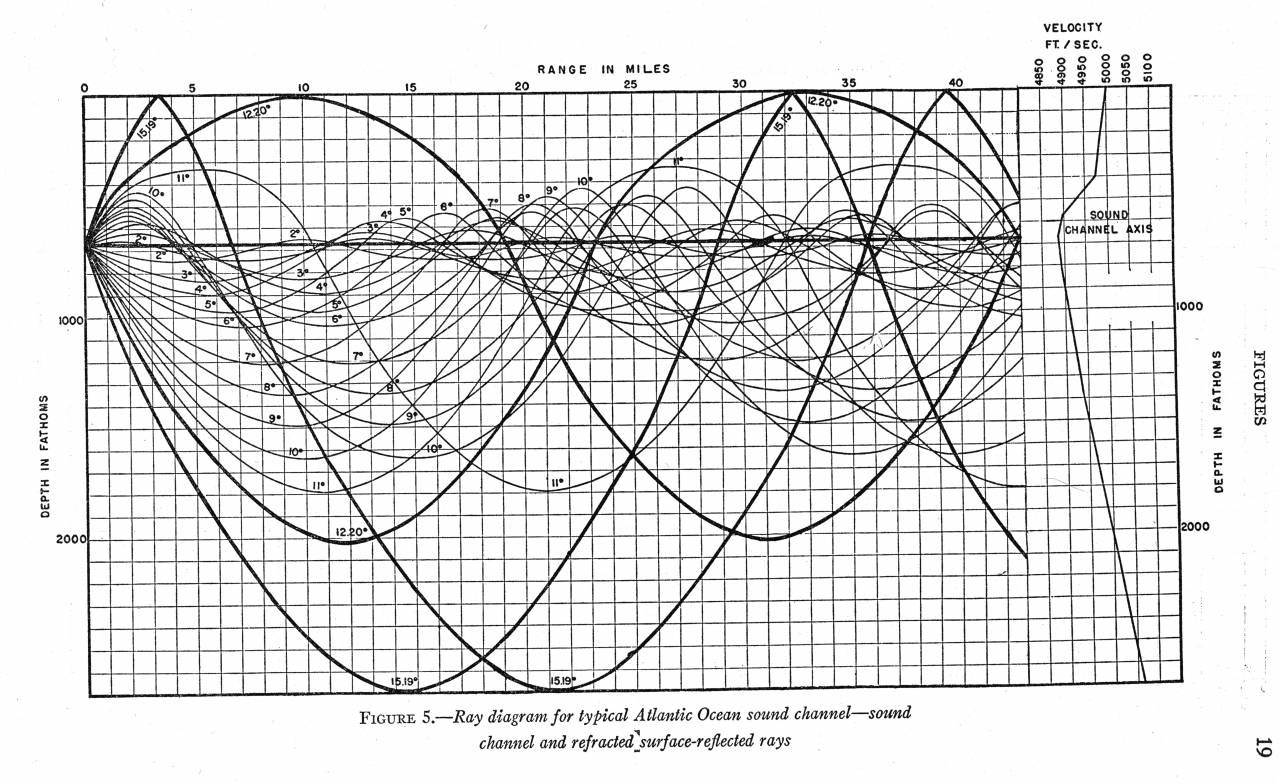
Para garantizar rangos máximos y condiciones óptimas de detección, el GPA buscó penetrar en el canal de sonido subacuático (PZK).
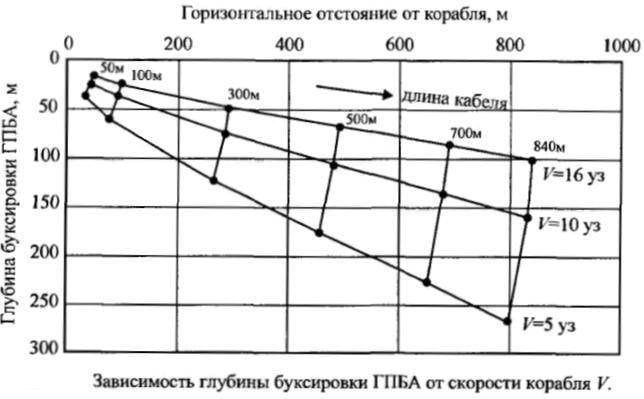
Teniendo en cuenta las peculiaridades de la propagación del sonido en presencia de un dispositivo de cierre rápido, la zona de detección del GPA fue unos pocos "anillos" de las zonas de iluminación y sombra.
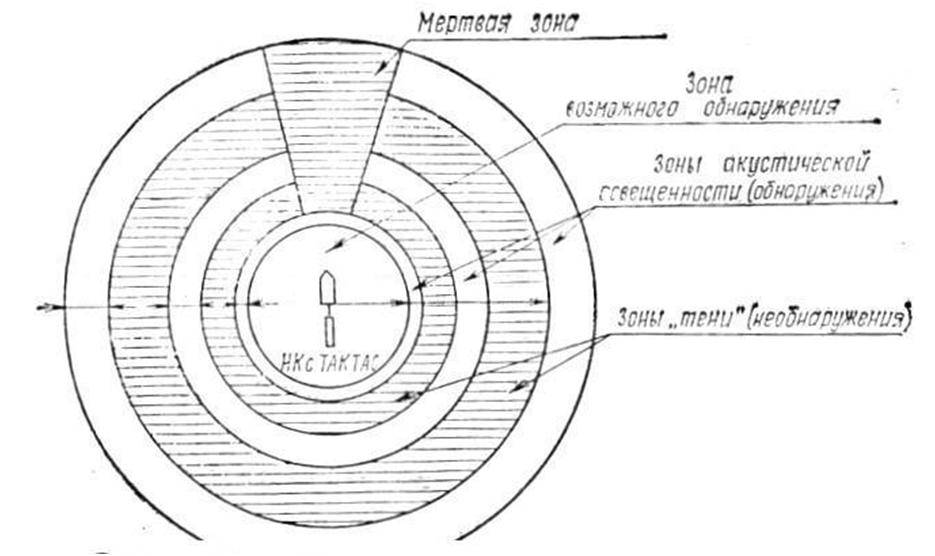
El diagrama también muestra lo que el barco necesita una savia para GAS también.
El requisito de "alcanzar y alcanzar" a los EE. UU. Según el GAS para buques de superficie se materializó en nuestro SAC MGK-355 Polynom (con una antena alada y remolcada y, por primera vez en el mundo (!), Un camino realmente funcional para detectar torpedos, asegurando su posterior destrucción). La cartera de pedidos de la URSS en electrónica no permitió crear un complejo completamente digital en los años 70 del siglo pasado, Polynom era analógico con el procesamiento digital secundario. Sin embargo, a pesar de su tamaño y peso, aseguró la creación de buques antisubmarinos altamente efectivos del Proyecto 1155.
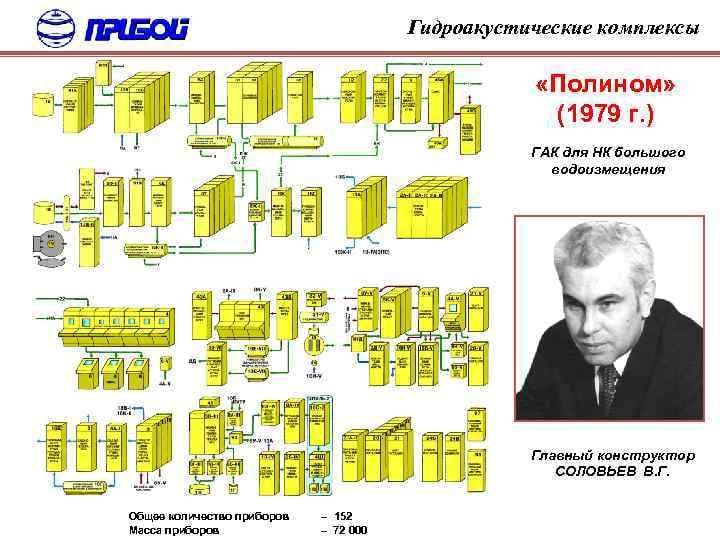
SJSC "Polynom" y jefe de diseño

DBO del proyecto 1155 - no es el único, sino el "transportista" más famoso de SJSC "Polynom"

BUGAS complejo "polinomial"
Los recuerdos vívidos del uso del complejo Polynom fueron dejados por la hidroacústica con el Almirante BPC Vinogradov:
... también fuimos encontrados y "ahogados". Entonces, cómo caerán las cartas. A veces, "Polynom" es inútil, especialmente si eras demasiado flojo para poner el BASIC a tiempo debajo de la capa de salto. Pero a veces "Polynomka" atrapa todo tipo de cosas bajo el agua, incluso durante 30 kilómetros, en persona.
"Polinomio". Potente pero antigua estación analógica.
No sé en qué estado se encuentran los polinomios ahora, pero hace unos 23-24 años era bastante posible clasificar pasivamente los objetivos de superficie ubicados a 15-20 km de distancia, es decir, fuera del control visual.
Si hay un visto bueno para trabajar en activo, siempre intente trabajar en él. Lo activo es más interesante. Con diferentes rangos y potencia. Los objetivos de superficie, dependiendo de la hidrología, en modo activo también están bien capturados.
Aquí estábamos de alguna manera parados en el centro del Estrecho de Ormuz, y tiene un ancho de 60 km con algo. Entonces el "Polynomushka" lo silbó todo. La desventaja del estrecho es que es poco profundo, 30 metros en total, y un montón de reflejos de señal acumulados. Es decir tranquilamente a lo largo de la costa, podría pasar desapercibido, probablemente. En el Báltico, el diesel se mantuvo a 34 km de una estación remolcada. Quizás, el BOD del proyecto 1155 tiene la oportunidad de usar la Trompeta en toda su extensión en su propia unidad de control.
Según un participante directo en los eventos, que era entonces el gorro "Vinogradov" V. Chernyavsky
Luego, los ingleses, franceses y los nuestros impartieron enseñanzas conjuntas en persa (el comienzo fue como en una broma). .. pasó a atrapar objetos bajo el agua.
Los amers tenían un par de simuladores (la tapa los llamaba constantemente "interferencia") con una ruta de conducción programable.
"El primero fue". Al principio, mientras el "ruido" giraba cerca, todos mantuvieron contacto. Bueno, para el polinomio, una distancia de hasta 15 km generalmente se considera una búsqueda cercana. Luego, el "obstáculo" desapareció y del colectivo de los que vieron, las piscinas infantiles con los sajones comenzaron a caerse. Los amers se cayeron, y toda la multitud occidental solo pudo escuchar nuestros informes sobre la distancia, rumbo, rumbo y velocidad de la "interferencia". Chernyavsky dijo, al principio, que los aliados probables realmente no creían en lo que estaba sucediendo y volvió a preguntar, como "contacto estable o no concentración".
Mientras tanto, la distancia a la interferencia superó los 20 km. Para no aburrirse, Amers lanzó un segundo simulador. La pintura al óleo se repite. Al principio, la animación revivió mientras el ruido giraba cerca (todo el simulador seguía manteniendo el nuestro) y luego el silencio roto por los informes de Vinik: "la primera" interferencia "está allí, la segunda está allí".
Resultó ser una verdadera vergüenza, dado que lo nuestro, a diferencia de lo nuestro, era qué golpear al objetivo a esa distancia (PLUR dispara a 50 km). Según la tapa, los datos sobre la maniobra de los simuladores tomados de los "cuerpos" y el "papel de calco" extraídos del agua de la "Vinika" coincidieron por completo.
"Polinomio". Potente pero antigua estación analógica.
No sé en qué estado se encuentran los polinomios ahora, pero hace unos 23-24 años era bastante posible clasificar pasivamente los objetivos de superficie ubicados a 15-20 km de distancia, es decir, fuera del control visual.
Si hay un visto bueno para trabajar en activo, siempre intente trabajar en él. Lo activo es más interesante. Con diferentes rangos y potencia. Los objetivos de superficie, dependiendo de la hidrología, en modo activo también están bien capturados.
Aquí estábamos de alguna manera parados en el centro del Estrecho de Ormuz, y tiene un ancho de 60 km con algo. Entonces el "Polynomushka" lo silbó todo. La desventaja del estrecho es que es poco profundo, 30 metros en total, y un montón de reflejos de señal acumulados. Es decir tranquilamente a lo largo de la costa, podría pasar desapercibido, probablemente. En el Báltico, el diesel se mantuvo a 34 km de una estación remolcada. Quizás, el BOD del proyecto 1155 tiene la oportunidad de usar la Trompeta en toda su extensión en su propia unidad de control.
Según un participante directo en los eventos, que era entonces el gorro "Vinogradov" V. Chernyavsky
Luego, los ingleses, franceses y los nuestros impartieron enseñanzas conjuntas en persa (el comienzo fue como en una broma). .. pasó a atrapar objetos bajo el agua.
Los amers tenían un par de simuladores (la tapa los llamaba constantemente "interferencia") con una ruta de conducción programable.
"El primero fue". Al principio, mientras el "ruido" giraba cerca, todos mantuvieron contacto. Bueno, para el polinomio, una distancia de hasta 15 km generalmente se considera una búsqueda cercana. Luego, el "obstáculo" desapareció y del colectivo de los que vieron, las piscinas infantiles con los sajones comenzaron a caerse. Los amers se cayeron, y toda la multitud occidental solo pudo escuchar nuestros informes sobre la distancia, rumbo, rumbo y velocidad de la "interferencia". Chernyavsky dijo, al principio, que los aliados probables realmente no creían en lo que estaba sucediendo y volvió a preguntar, como "contacto estable o no concentración".
Mientras tanto, la distancia a la interferencia superó los 20 km. Para no aburrirse, Amers lanzó un segundo simulador. La pintura al óleo se repite. Al principio, la animación revivió mientras el ruido giraba cerca (todo el simulador seguía manteniendo el nuestro) y luego el silencio roto por los informes de Vinik: "la primera" interferencia "está allí, la segunda está allí".
Resultó ser una verdadera vergüenza, dado que lo nuestro, a diferencia de lo nuestro, era qué golpear al objetivo a esa distancia (PLUR dispara a 50 km). Según la tapa, los datos sobre la maniobra de los simuladores tomados de los "cuerpos" y el "papel de calco" extraídos del agua de la "Vinika" coincidieron por completo.
Por separado, es necesario detenerse en el problema del desarrollo de GPBA en la URSS. La I + D relevante comenzó a finales de los años 60, casi simultáneamente con los Estados Unidos.
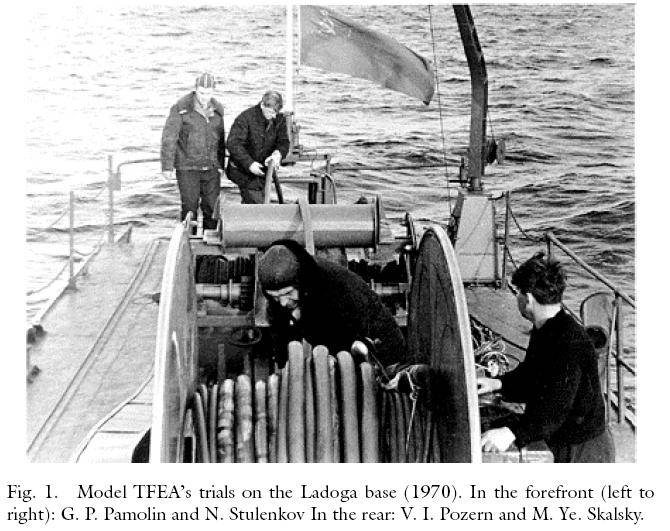
Pruebas de la GPBA soviética en el lago Ladoga, 1970.
Sin embargo, las capacidades tecnológicas significativamente peores y una fuerte disminución en el nivel de ruido (y DS) de los objetivos bajo el agua, que se identificaron claramente desde finales de los años 70 del siglo pasado, no permitieron la creación de un GPA efectivo para NK hasta principios de los 90.
El primer prototipo de Centaur State Joint-Stock Company con GPBA se desplegó a bordo del buque de prueba GS-31 de la Flota del Norte.

De las memorias de su comandante:
Tomó una parte activa en la prueba del nuevo complejo de GA ... oportunidades, solo una canción, desde el medio del Barentsukha se puede escuchar todo lo que se está haciendo en NEA (Atlántico Nordeste. - Aut.) ... El noruego dieselyuha se escuchó bajo el agua desde lejos, en inglés "Trafalgar" llevado sin descanso durante dos días ...
...
Con el fin de elaborar un "retrato" del nuevo submarino estadounidense como Sea Wolf - Connecticut, que realizó su primer viaje a las costas de Rusia, tuve que violar directamente la Orden de Combate y encontrarme en el borde de los tervodes, donde los especialistas de "ciencia" la copiaron a lo largo y ancho ...
...
Con el fin de elaborar un "retrato" del nuevo submarino estadounidense como Sea Wolf - Connecticut, que realizó su primer viaje a las costas de Rusia, tuve que violar directamente la Orden de Combate y encontrarme en el borde de los tervodes, donde los especialistas de "ciencia" la copiaron a lo largo y ancho ...
Y a mediados de los años 80, la I + D se completó en HAC totalmente digital para barcos, una serie (de barcos pequeños a grandes) de Zvezda.
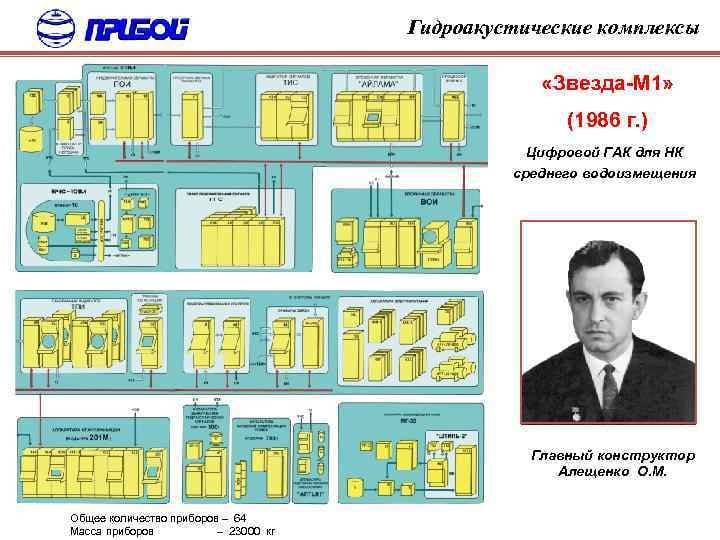
SJSC "Star-M1" de "dimensión media"
Cuarta generación. Despues de la guerra fria
La disminución en el ruido de los submarinos construidos en los años 80 condujo a una fuerte disminución en los rangos y la posibilidad de su detección por GPA pasivo, lo que llevó a la idea lógica: "resaltar" el área del agua y los objetivos con un emisor de baja frecuencia (LFR) y no solo para preservar la efectividad de los medios de búsqueda pasiva para submarinos (barcos GPBA) , Russian State Aviation Safety Aviation), pero también aumentan significativamente sus capacidades (especialmente cuando se trabaja en condiciones difíciles).
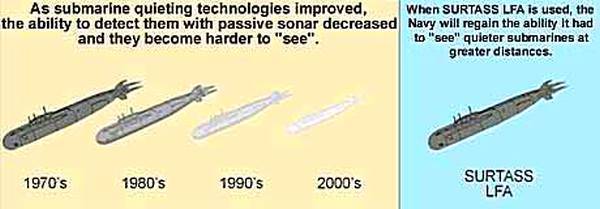
La dinámica de los cambios en la "visibilidad" de los submarinos de la Armada de la URSS en el campo acústico primario ("ruido") y la capacidad del LF (LFA) para detectar submarinos de bajo ruido
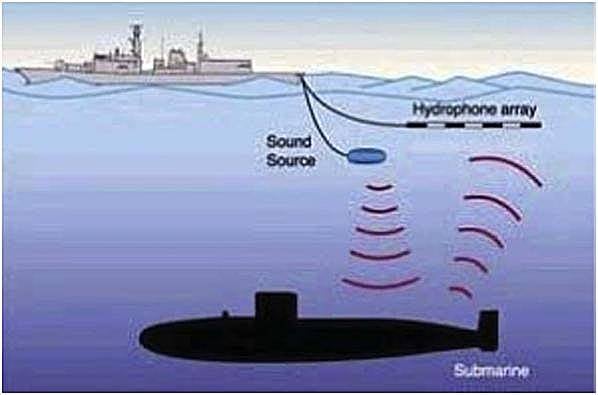
"Combinación táctica": buque antisubmarino GPBA y NCHI
La I + D correspondiente se inició en los países occidentales a fines de los años 80 del siglo pasado, mientras que su característica importante fue la apuesta inicial para garantizar la operación de varios GAS (incluidos los buques y la aviación RSLA) en modo de múltiples posiciones, en la forma de una "búsqueda única sistemas ".
Uno de los primeros contratos de NFT para el GPA US Navy, 1990
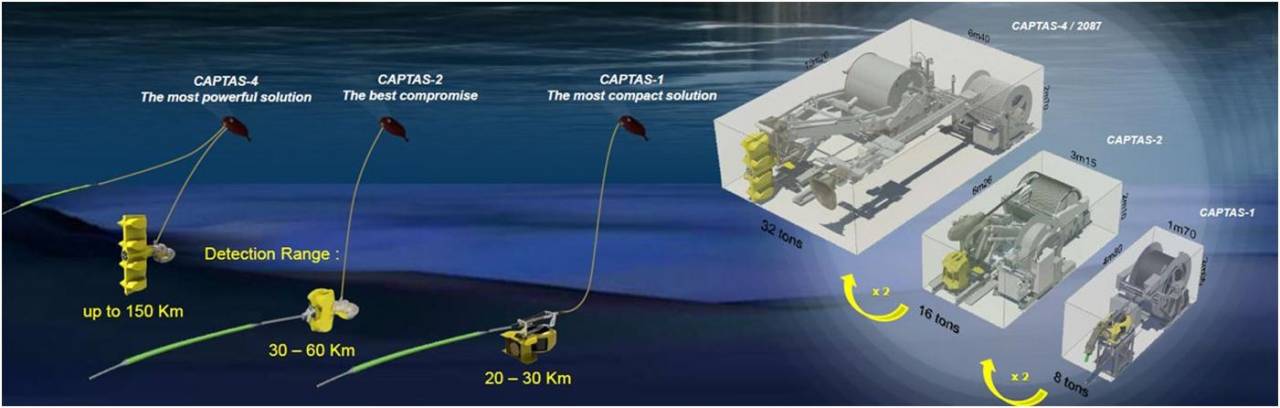
"Familia" de baja frecuencia Bugas CAPTAS. Se indican los rangos de detección y los pesos de los equipos.
Los expertos nacionales han formado puntos de vista sobre cuáles deberían ser esos sistemas. Del trabajo de Yu.A. Koryakina, S.A. Smirnova y G.V. Yakovleva "Equipo hidroacústico para barcos":
Una vista generalizada de GAS de este tipo se puede formular de la siguiente manera.
1. El HAS activo con GPAA puede proporcionar un aumento significativo en la efectividad de los submarinos en áreas de aguas poco profundas con condiciones hidrológicas y acústicas complejas.
2. El GAS debe acomodarse fácilmente en pequeños buques de guerra y barcos civiles involucrados en misiones antiaéreas sin un cambio significativo en el diseño del barco. Al mismo tiempo, el área ocupada por UHPV (dispositivo de almacenamiento, configuración y recuperación de GPBA - autenticación) en la cubierta del barco no debe exceder varios metros cuadrados, y el peso total de UHPV junto con la antena no debe exceder varias toneladas.
3. El funcionamiento del GAS debe proporcionarse tanto en modo autónomo como como parte de un sistema multiestático.
4. El alcance de detección de los submarinos y la determinación de sus coordenadas deben proporcionarse en el mar profundo a distancias del primer DZAO (zona lejana de iluminación acústica, hasta 1 km) y en el mar poco profundo bajo iluminación acústica continua - hasta 65 km.
Para implementar estos requisitos, la creación de un módulo emisor compacto de baja frecuencia es de suma importancia. Al vincular un cuerpo remolcado, el objetivo siempre es reducir la resistencia. La investigación y el desarrollo modernos de emisores remolcados de baja frecuencia van en diferentes direcciones. Tres de ellos pueden distinguirse de interés práctico.
La primera opción implica la creación de un módulo radiante en forma de un sistema de emisores que forman una matriz de antena tridimensional, que se encuentra en un cuerpo remolcado aerodinámico. Un ejemplo es la disposición de los emisores en el sistema LFATS de L-3 Communications, EE. UU. El conjunto de antenas LFATS consta de 16 radiadores distribuidos en 4 pisos, el paso entre los radiadores es λ / 4 en el plano horizontal y λ / 2 en el plano vertical. La presencia de una matriz de antenas tan grande le permite dar una antena radiante, lo que ayuda a aumentar el alcance del sistema.
En la segunda versión, se utilizan emisores potentes omnidireccionales (uno, dos o más), como se implementa en el GAS Vignette-EM nacional y algunos GAS extranjeros.
En la tercera realización, la antena radiante está hecha en forma de un conjunto lineal de radiadores de flexión longitudinal, por ejemplo, del tipo Diabo1o. Tal antena radiante es una guirnalda flexible que consiste en pequeños elementos cilíndricos de muy pequeño diámetro, que están conectados por un cable. Debido a su flexibilidad y pequeño diámetro, la antena, que consiste en EAL (transductores electroacústicos - ed.) Tipo "Diabolo", se enrolla en el mismo tambor del cabrestante que el cable de remolque y GPBA. Esto le permite simplificar significativamente el diseño de UHPV, reducir su peso y dimensiones y abandonar el uso de un manipulador complejo y voluminoso.
1. El HAS activo con GPAA puede proporcionar un aumento significativo en la efectividad de los submarinos en áreas de aguas poco profundas con condiciones hidrológicas y acústicas complejas.
2. El GAS debe acomodarse fácilmente en pequeños buques de guerra y barcos civiles involucrados en misiones antiaéreas sin un cambio significativo en el diseño del barco. Al mismo tiempo, el área ocupada por UHPV (dispositivo de almacenamiento, configuración y recuperación de GPBA - autenticación) en la cubierta del barco no debe exceder varios metros cuadrados, y el peso total de UHPV junto con la antena no debe exceder varias toneladas.
3. El funcionamiento del GAS debe proporcionarse tanto en modo autónomo como como parte de un sistema multiestático.
4. El alcance de detección de los submarinos y la determinación de sus coordenadas deben proporcionarse en el mar profundo a distancias del primer DZAO (zona lejana de iluminación acústica, hasta 1 km) y en el mar poco profundo bajo iluminación acústica continua - hasta 65 km.
Para implementar estos requisitos, la creación de un módulo emisor compacto de baja frecuencia es de suma importancia. Al vincular un cuerpo remolcado, el objetivo siempre es reducir la resistencia. La investigación y el desarrollo modernos de emisores remolcados de baja frecuencia van en diferentes direcciones. Tres de ellos pueden distinguirse de interés práctico.
La primera opción implica la creación de un módulo radiante en forma de un sistema de emisores que forman una matriz de antena tridimensional, que se encuentra en un cuerpo remolcado aerodinámico. Un ejemplo es la disposición de los emisores en el sistema LFATS de L-3 Communications, EE. UU. El conjunto de antenas LFATS consta de 16 radiadores distribuidos en 4 pisos, el paso entre los radiadores es λ / 4 en el plano horizontal y λ / 2 en el plano vertical. La presencia de una matriz de antenas tan grande le permite dar una antena radiante, lo que ayuda a aumentar el alcance del sistema.
En la segunda versión, se utilizan emisores potentes omnidireccionales (uno, dos o más), como se implementa en el GAS Vignette-EM nacional y algunos GAS extranjeros.
En la tercera realización, la antena radiante está hecha en forma de un conjunto lineal de radiadores de flexión longitudinal, por ejemplo, del tipo Diabo1o. Tal antena radiante es una guirnalda flexible que consiste en pequeños elementos cilíndricos de muy pequeño diámetro, que están conectados por un cable. Debido a su flexibilidad y pequeño diámetro, la antena, que consiste en EAL (transductores electroacústicos - ed.) Tipo "Diabolo", se enrolla en el mismo tambor del cabrestante que el cable de remolque y GPBA. Esto le permite simplificar significativamente el diseño de UHPV, reducir su peso y dimensiones y abandonar el uso de un manipulador complejo y voluminoso.
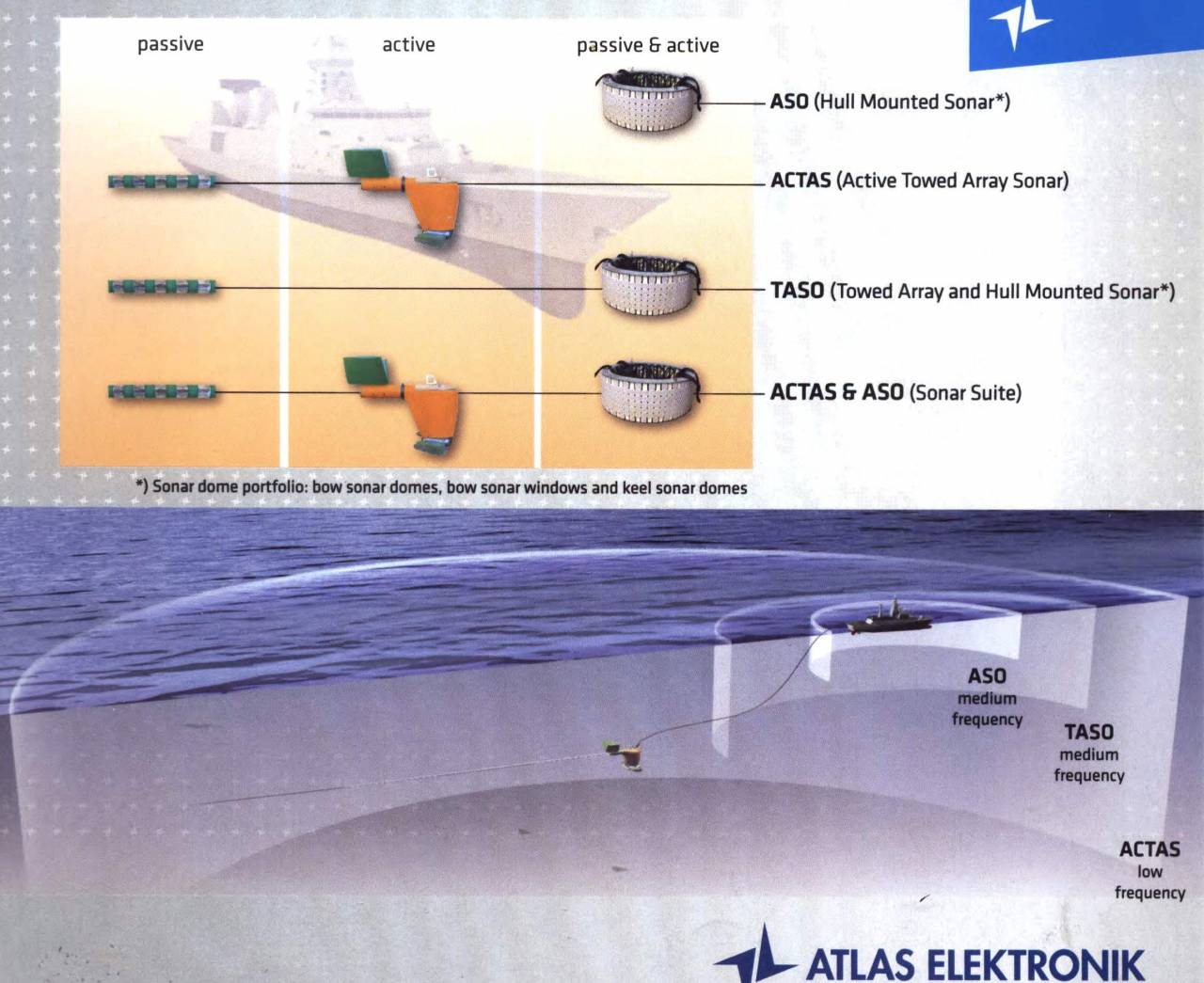
Conjunto completo y relación de rangos de detección de elementos de a bordo GAS de la firma ATLASELEKTRONIK[/ Center]

Un ejemplo de un BUGAS compacto con GPA fabricado por tecnologías Geospectrum
En la Federación Rusa, se desarrolló una familia de modernos "Minotauro" / "Vignette" de BUGAS, con características de rendimiento cercanas a los análogos extranjeros.
Se instalan nuevos BUGAS en los buques de los proyectos 22380 y 22350.
Sin embargo, la situación real es casi catastrófica.
En primer lugar, se interrumpió la modernización por nuevos GAS de los barcos de la tripulación de combate y el suministro normal (en masa) de nuevos. Es decir Hay muy pocos barcos con GAS nuevo. Y esto significa que, teniendo en cuenta las condiciones hidrológicas reales (complejas) y, por regla general, la estructura zonal del campo acústico (la presencia de zonas de "iluminación" y "sombra"), no se puede hablar de ninguna defensa antisubmarina efectiva. No se proporciona PLO confiable ni siquiera para buques de guerra (y más aún para barcos individuales).

Carrocería remolcada BUGAS "Minotauro"
Dadas las condiciones, la iluminación efectiva y confiable del entorno submarino solo puede garantizarse mediante un grupo de fuerzas antisubmarinas diferentes distribuidas de manera óptima en el área, que operan como un "complejo de búsqueda único de múltiples posiciones". El número extremadamente pequeño de naves nuevas con los Minotauros simplemente no permite que se formen.
En segundo lugar, nuestros "Minotauros" no proporcionan la creación de un sistema completo de búsqueda de múltiples posiciones, porque existen en un "mundo paralelo" de nuestro propio avión antisubmarino.
Los helicópteros antisubmarinos se han convertido en una parte muy importante de los nuevos motores de búsqueda. Equiparlos con un nuevo OGAS de baja frecuencia permitió proporcionar una "luz de fondo" efectiva tanto para los buques RSLA como para los GPBA.

Modo de múltiples posiciones OGAS HERLAS
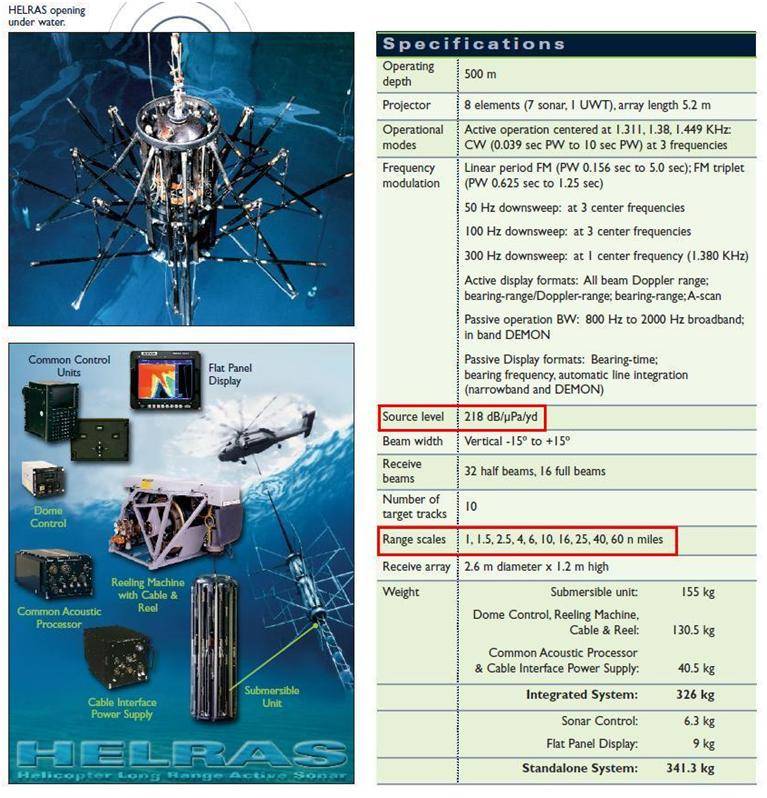
TTX OGAS HERLAS
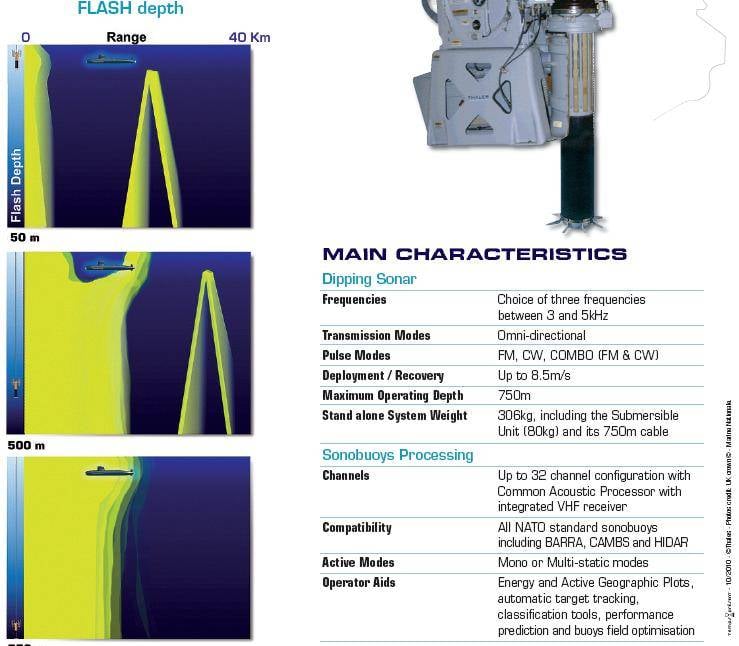
Características y área de iluminación en diferentes condiciones ОГАС FLASH
Y aunque los helicópteros occidentales pueden proporcionar una colaboración de múltiples posiciones con Bugas y aviación (RSAH) con el nuevo OGAS, incluso los últimos barcos del proyecto 22350 tienen un helicóptero Ka-27M modernizado, que esencialmente tiene el mismo "Ros" OGAS de alta frecuencia (solo digital) y en una nueva base de elementos), como en el helicóptero Ka-27 soviético de los años 80, que tiene características de rendimiento absolutamente insatisfactorias y no puede trabajar junto con el Minotauro, o para "resaltar" el campo de los Archivos Estatales de Radiación de Rusia. Solo porque trabajan en diferentes rangos de frecuencia.

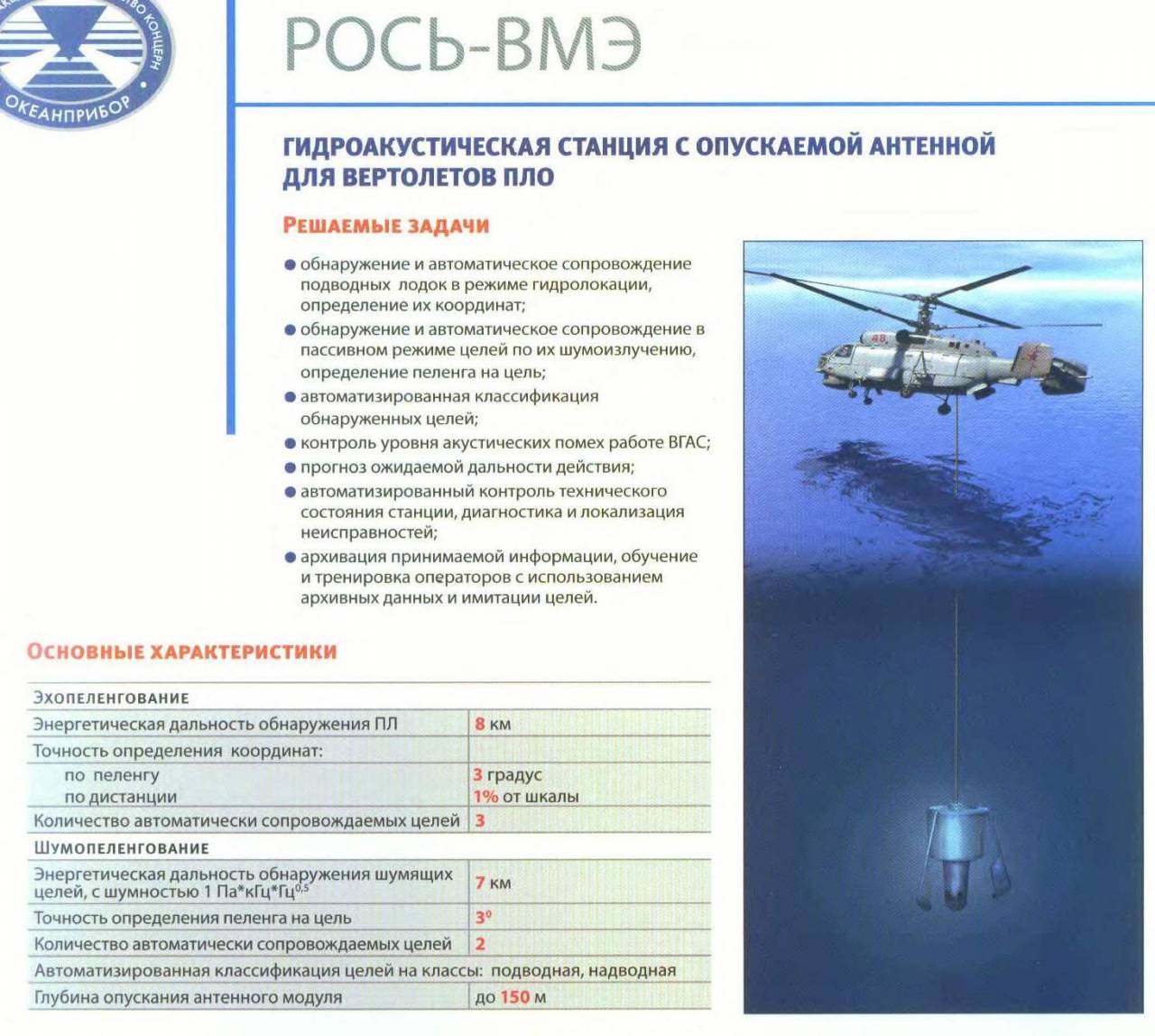
OGAS "Ros"
¿Tenemos OGAS de baja frecuencia en nuestro país? Sí, hay, por ejemplo, "Sterlet" (que tiene una masa cercana a las OGAS HELRAS).

OGAS "Sterlet".
Sin embargo, su rango de frecuencia del modo activo difiere del Minotauro (es decir, no proporciona trabajo conjunto nuevamente), y lo más importante, la aviación naval "no lo ve en blanco".
Desafortunadamente, hasta ahora, nuestra aviación naval es un "automóvil separado" del "tren" de la Armada. En consecuencia, el OGAS y el RSLAB de la Armada "viven" en la misma "realidad paralela" del GAS del buque de la Armada.
¿El resultado?
A pesar de todas las dificultades tecnológicas, tenemos un nivel técnico muy decente de hidroacústica doméstica. Sin embargo, con la percepción e implementación de nuevos conceptos (modernos) para construir y usar herramientas de búsqueda de submarinos, estamos simplemente en la oscuridad: un retraso detrás de Occidente por al menos una generación.
De hecho, el país no tiene defensa antisubmarina, y esto no molesta a los funcionarios en absoluto. Incluso los últimos portadores de Calibre (proyecto 21631 y 22800) no tienen armas antisubmarinas ni protección antitorpedo.
El "VHC-2 moderno" elemental ya podría aumentar significativamente su estabilidad de combate, haciendo posible detectar tanto un ataque de torpedo como un medio submarino de saboteadores (a distancias mucho más largas que el "Anapa" regular) y, con suerte, y submarinos.
Tenemos una gran cantidad de PSKR Bohr, que no están planificados para su uso en caso de guerra. Una pregunta simple: en caso de guerra con Turquía, ¿qué comenzarían a hacer estos PSKR Bohr? ¿Esconderse en las bases?
Y el último ejemplo. De la categoría "hacer avergonzar a los almirantes".


El GAS remolcado es visible en la popa, en la primera foto, sin tapa.
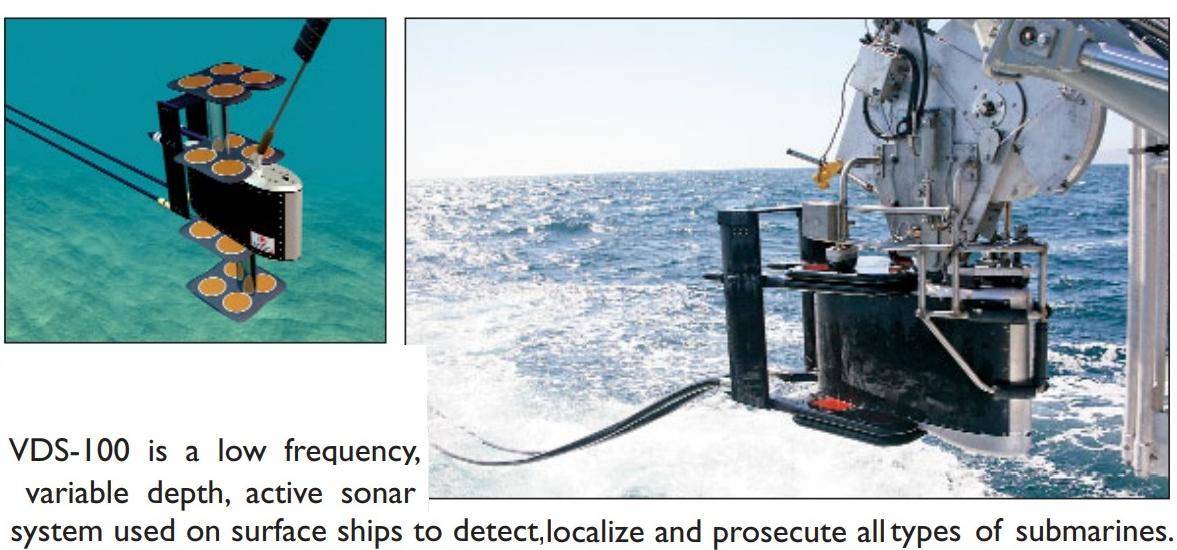
La Armada egipcia modernizó sus patrulleras del proyecto chino Hainan (el "pedigrí" del cual proviene de nuestro proyecto 122 del final de la Segunda Guerra Mundial) con la instalación de BUGAS modernos (VDS-100 de L3 fue mencionado en los medios).
De hecho, según sus características, es el Minotauro, pero instalado en un barco con un desplazamiento de 450 toneladas.
[Centro]
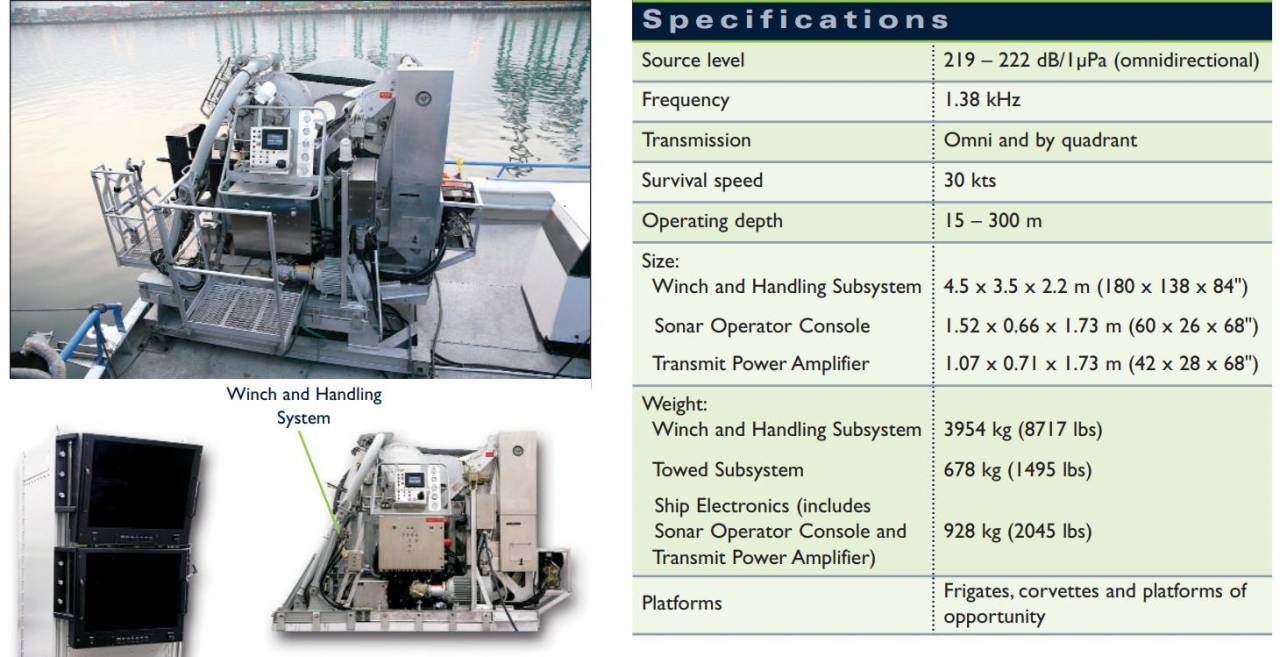
VDS-100
¿Por qué la Armada rusa no tiene nada de esto? ¿Por qué no tenemos una serie de OGAS modernos de baja frecuencia? ¿GAS de pequeño tamaño para equipamiento masivo de barcos de la Armada (sin GAC "a gran escala") y PSKR BOHR durante la movilización? De hecho, tecnológicamente, todo esto está completamente dentro del poder de la industria nacional.
Y la pregunta más importante: ¿se tomarán finalmente medidas para corregir esta situación vergonzosa e inaceptable?
To be continued ...
- Maxim Klimov, Alexander Timokhin
- Wikipedia commons, Surf Factory, GeoSpectrum Technologies, L3, Ministerio de Defensa de Rusia, USNI News
información