ANPA vs AUG

En artículos anteriores, consideramos las posibilidades para detectar grupos de ataque de portaaviones (AUG) reconocimiento espacial, UAV eléctricos estratosféricos, UAV de gran y media altitud de clase HALE y MALE... Inmediatamente antes de golpear el AUG se puede arreglar "Caza impulsada" con la ayuda de una bandada de vehículos aéreos no tripulados de pequeño tamaño basados en misiles de crucero и destrucción de aeronaves AWACS en la dirección del ataque.
Consideremos otra dirección prometedora: los vehículos submarinos autónomos no tripulados (AUV).
Hablemos de algunos puntos de inmediato.
A menudo, en los comentarios de los artículos suena algo como esto:
"¿Por qué hablar de lo que no es?"
"Nunca tendremos eso".
"Nunca tendremos eso".
Y así sucesivamente etc.
No tenemos muchas cosas. Por ejemplo, en realidad no tenemos portaaviones (no contamos al desafortunado Kuznetsov como tal), pero las conversaciones sobre su creación han estado circulando durante más de una década. No tenemos vehículos aéreos no tripulados de gran altura, pero hace un año no había vehículos de media altura, y este año ya han pasado a las tropas. No hay vehículos de lanzamiento reutilizables y la producción de satélites asciende a cientos y miles al año, pero hace un par de años nadie tenía esto. Y no tenemos ningún obstáculo fundamental para dominar estas tecnologías (pero hay muchas razones para no dominarlas).
En nuestro tiempo, las tecnologías civiles y militares se están desarrollando rápidamente, como resultado de lo cual aparecen sistemas y complejos (todavía imposible hace una década). Y no estamos hablando de la mítica "antigravedad", sino de tecnologías completamente terrestres, como el láser. armas, que, aunque comenzó a crearse hace mucho tiempo, solo ahora ha madurado hasta su uso práctico. Por tanto, intentaremos tener en cuenta las previsiones técnicas de hoy y de mañana. Bueno, creer en ellos o no es un asunto privado para todos.
¿Dónde conseguir el dinero para todo esto? Puede que no todo funcione, pero hay dinero más que suficiente en el país. La pregunta debería plantearse más bien sobre su uso previsto / inadecuado.
Planeadores submarinos
Anteriormente, analizamos los UAV eléctricos de gran altitud, potencialmente capaces de estar en el aire durante meses o incluso años. Hay algo conceptualmente similar para flota.
Estamos hablando de los llamados planeadores submarinos, que utilizan el efecto del deslizamiento submarino cambiando la flotabilidad y el asiento. Además, su parte submarina se puede conectar con un cable a la superficie, llevando una batería solar y antenas de comunicación.
Un ejemplo es el aparato Wave Glider, que tiene una estructura de dos secciones. El casco con el mecanismo de gobierno, las baterías de iones de litio y los paneles solares está conectado al bastidor parcial submarino mediante un cable de 8 metros de largo. Las alas del marco oscilan y le dan al Wave Glider una velocidad de aproximadamente dos kilómetros por hora.
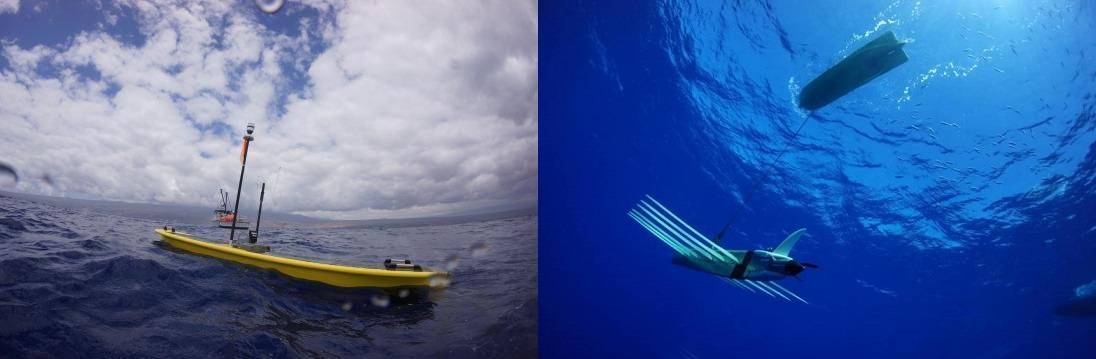
Planeador de olas
Wave Glider tiene buena resistencia a las condiciones de tormenta. La autonomía del dispositivo es de 1 año sin mantenimiento. La plataforma Wave Glider es de código abierto. Y se pueden integrar varios equipos en él. El costo de un Wave Glider es de aproximadamente $ 220.
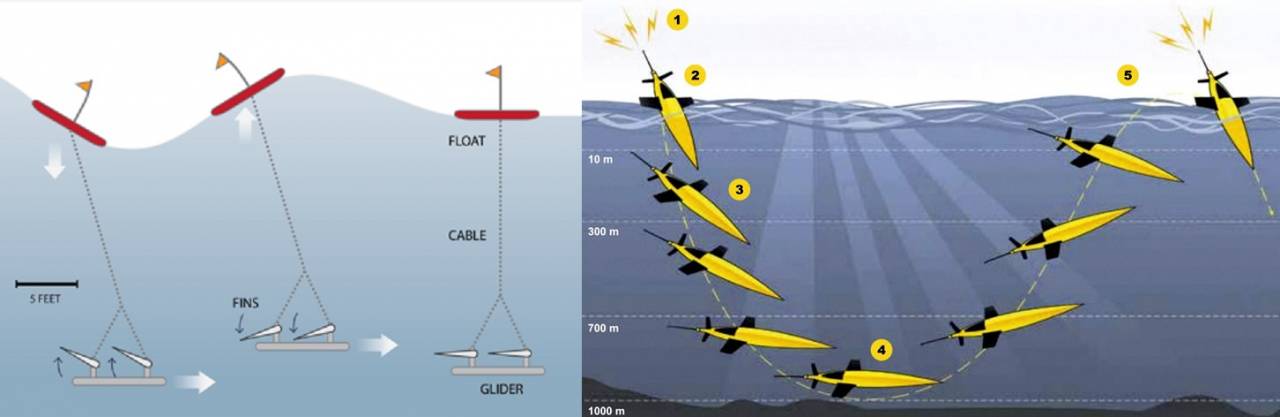
Esquemas para mover planeadores de diferentes tipos.
Wave Glider está construido con tecnología civil. Y se utiliza para fines civiles: para medir la actividad sísmica, el campo magnético, la calidad del agua en áreas de perforación en aguas profundas, buscar fugas de petróleo, estudiar la salinidad, la temperatura del agua, las corrientes oceánicas y muchas otras tareas.
Con fines militares, los dispositivos Wave Glider se están probando para resolver problemas de búsqueda de submarinos, protección de puertos, reconocimiento y vigilancia, recolección de datos meteorológicos y transmisión de comunicaciones.
En Rusia, el desarrollo de planeadores submarinos lo lleva a cabo JSC NPP PT Okeanos. El primer ejemplo práctico, el planeador MAKO, con una profundidad de inmersión de trabajo de hasta 100 metros, fue desarrollado y probado en 2012.

Planeador experimentado MAKO de JSC "NPP PT" Oceanos "
Los expertos sugieren la posibilidad de desplegar cientos e incluso miles de planeadores submarinos en el futuro, operando dentro de una única estructura distribuida centrada en la red. La autonomía de los planeadores submarinos puede ser de hasta cinco años.
Sus ventajas (además de una alta autonomía) incluyen bajo costo de creación y operación, bajo nivel de sus propios campos físicos, facilidad de implementación.
Si tomamos como base el costo del aparato Wave Glider de 220 mil dólares estadounidenses, entonces se pueden producir 200 unidades por valor de 44 millones de dólares estadounidenses por año. En 5 años habrá 1000 de ellos. Y en el futuro, esta cantidad se puede mantener a un nivel constante.
¿Es mucho o poco? El área de los océanos del mundo es de 361 kilómetros cuadrados. Así, cuando se lancen 260 planeadores submarinos, habrá 000 kilómetros cuadrados por 1000 planeador (esto es un cuadrado con un lado de 1 km).

Mil planeadores submarinos, distribuidos por la superficie de las aguas del Océano Mundial.
De hecho, el área de la superficie del agua que nos interesa será mucho menor, también eliminaremos las aguas fronterizas, la superficie cubierta de hielo. Y, finalmente, un planeador submarino caerá sobre un cuadrado con un lado del orden de 100-200 kilómetros.
¿Qué pueden hacer estos planeadores? En primer lugar, para resolver las tareas de inteligencia electrónica (RTR): para detectar la radiación de las estaciones de radar (radar) de los aviones de alerta temprana (AWACS) y el radar de los aviones de detección antisubmarina (PLO), intercambio de radio a través de los canales de comunicación Link-16. También puede detectar señales de boyas hidroacústicas que operan en modo activo, instalaciones de comunicación acústica submarina y el funcionamiento de estaciones hidroacústicas (GAS) en modo activo.
En Rusia, se están desarrollando métodos no acústicos para detectar objetivos de bajo ruido por rastros de estela, térmicos y radiactivos, así como por campos de rastros del movimiento de hélices bajo el agua. Es posible que algunos de ellos se puedan implementar como parte del equipo de planeador submarino.
La información agregada recibida a través de los canales de transmisión de datos por satélite de toda la red de planeadores submarinos permitirá detectar con una alta probabilidad barcos de superficie, aviones AWACS y PLO, submarinos enemigos.
¿Puede un solo barco "deslizarse" entre cientos de planeadores submarinos? Probablemente si. ¿AUG podrá hacer esto? Improbable. Y cuantos más barcos y aviones haya en el AUG, más probable será que se revele su ubicación.
Los barcos y aviones de AUG operan en un vasto territorio, decenas de miles de kilómetros cuadrados.
¿Puede el enemigo detectar planeadores submarinos? Quizás, pero no todos. Y nunca estará seguro de haberlos encontrado a todos. El planeador en sí tiene una visibilidad mínima y la transmisión de datos al satélite se puede realizar en ráfagas cortas.
Además, como en el caso de los UAV eléctricos estratosféricos, existe una alta probabilidad de que haya muchos planeadores no solo militares, sino también civiles. Encontrarlos y destruirlos a todos requerirá una actividad significativa por parte del enemigo, que lo desenmascarará frente a otros medios de reconocimiento.
Las misiones de planeadores no se limitarán solo al reconocimiento. Se pueden usar para dar señales falsas en el radar y rangos acústicos para atraer deliberadamente la atención del enemigo y desviar sus recursos de la búsqueda de otras amenazas.
No se puede descartar la posibilidad de utilizar planeadores como una especie de campos minados móviles. Sin embargo, estos ya serán productos mucho más grandes, más complejos y costosos.
Vehículos submarinos autónomos no tripulados
En principio, los planeadores submarinos considerados en el apartado anterior también se refieren a AUV ligeros, pero en este artículo utilizaremos esta abreviatura en relación con vehículos submarinos no tripulados de mayor dimensión.
La Oficina Central de Diseño de Ingeniería Marina de Rubin ha realizado trabajos de I + D en el vehículo submarino robótico Surrogate.

Imagen de AUV "Surrogate".
La longitud del casco del AUV "Surrogate" es de 17 metros, el desplazamiento estimado es de 40 toneladas. Profundidad de buceo de hasta 600 metros, velocidad máxima de 24 nudos, alcance de crucero de más de 600 millas náuticas. La tarea principal del AUV "Surrogate" es simular las características magnetoacústicas de varios submarinos.
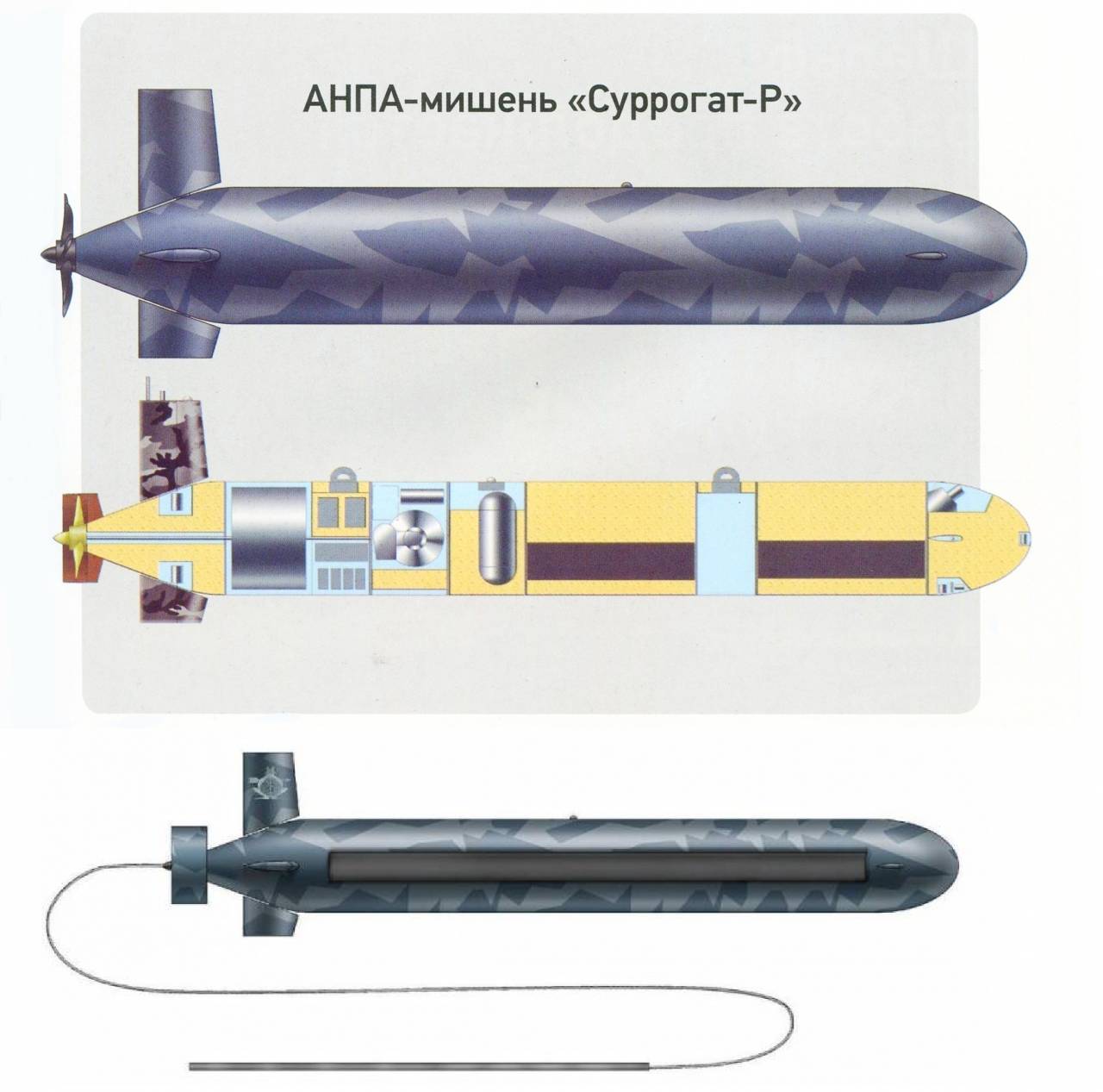
Esquema "sustituto" de AUV.
Los AUV del tipo "sustituto" se pueden utilizar para desviar las fuerzas antisubmarinas enemigas, para cubrir el despliegue de cruceros submarinos de misiles estratégicos (SSBN). Potencialmente, sus dimensiones les permiten colocarse en el casco exterior de submarinos nucleares multipropósito (MCSNS) y SSBN.

Barco balístico y de misiles nucleares submarinos (SSBN) "Ohio" con pequeños submarinos unidos al casco para transportar saboteadores. Asimismo, se pueden fijar varios AUV "Surrogate" en el casco del MCSAP / SSBN.
Usando el AUV "Surrogate", SSNS y SSBN pueden aumentar su capacidad de supervivencia e implementar nuevos esquemas tácticos para contrarrestar NK y submarinos enemigos.
Los dispositivos de tipo "sustituto" AUV pueden considerarse el "primer signo" entre tales armas. En el futuro, su diseño se volverá más complicado y la lista de tareas a resolver se expandirá: esto es reconocimiento y comunicaciones de retransmisión, y el uso de AUV como plataforma de armas remotas, y no solo para armas torpedo o misiles antibuque (ASM), sino también para tales. Armas específicas para submarinos, como sistemas de misiles antiaéreos (SAM).
La colocación de sistemas de defensa aérea en submarinos tripulados y deshabitados puede cambiar significativamente el formato de la guerra en el mar, nivelando en gran medida las capacidades de los aviones PLO y AWACS que cubren el AUG..
En Rusia hay una base importante para la creación de un AUV. Un ejemplo es el AUV SGP Vityaz-D de aguas profundas desarrollado por Rubin Central Design Bureau MT.

AUV SGP "Vityaz-D" desarrollado por CDB MT "Rubin".
AUV SGP "Vityaz-D" está diseñado para levantamiento y búsqueda y levantamiento batimétrico, muestreo de la capa superior del suelo, levantamiento sonar de la topografía del fondo, medición de parámetros hidrofísicos del medio marino. El dispositivo tiene flotabilidad cero, se utilizan aleaciones de titanio y esferoplásticos de alta resistencia en el diseño. Está impulsado por cuatro motores de crucero y diez propulsores. La carga útil incluye ecosondas, sonares, instalaciones de comunicación y navegación hidroacústicas, cámaras de video y otros equipos de investigación. El alcance es de 150 km, la autonomía del dispositivo es de aproximadamente un día.
También se han desarrollado AUV de la serie "Clavicémbalo", que existen en dos modificaciones: "Clavicémbalo-1R", desarrollado por el Instituto de Problemas de Tecnologías Marinas de la Rama del Lejano Oriente de la Academia de Ciencias de Rusia (IMPT FEB RAS) y "Clavicémbalo-2R-PM", desarrollado por la Oficina Central de Diseño MT "Rubin" (muy probablemente, la investigación fue realizada por estas organizaciones en conjunto).

AUV "Harpsichord-1R" (arriba) y "Harpsichord-2R-PM" (abajo).
El peso del AUV "Harpsichord-1R" es de 2,5 toneladas con una longitud de casco de 5,8 my un diámetro de 0,9 m. La profundidad de inmersión es de hasta 6000 m, el rango de crucero es de hasta 300 km, la velocidad es de 2,9 nudos. El equipo del AUV "Harpsichord-1R" incluye sonares de barrido lateral, un buscador electromagnético, un magnetómetro, un sistema de video digital, un perfilador acústico, sensores de temperatura y conductividad. El movimiento se realiza mediante baterías recargables.
Sobre la base del AUV, así como boyas hidroacústicas flotantes, submarinas y congeladas conectadas a través de los satélites Gonets-D1M al centro de mando, la empresa Okeanpribor planea crear el sistema de navegación y comunicación Positioner.
El sistema debe permitir la navegación de los AUV y vincularlos con los centros de control terrestres, aéreos y marítimos en tiempo real mediante comunicaciones VHF, con posibilidad de control directo del AUV.
Cabe señalar que los AUV existentes y futuros todavía tienen un rango bastante limitado. Quizás este problema pueda resolverse radicalmente mediante el uso generalizado de baterías avanzadas, plantas de energía para submarinos no nucleares (NNS) o incluso la creación de reactores nucleares compactos similares a los instalados en el Poseidon AUV. Un reactor de este tipo, si se proporciona un recurso suficiente, puede instalarse no solo en el AUV, sino en submarinos nucleares de pequeño tamaño basados en submarinos no nucleares y diesel-eléctricos. Discutimos este tema en detalle en el artículo. Reactor nuclear para NAPL. Will Poseidón pone el huevo de Dollezhal.
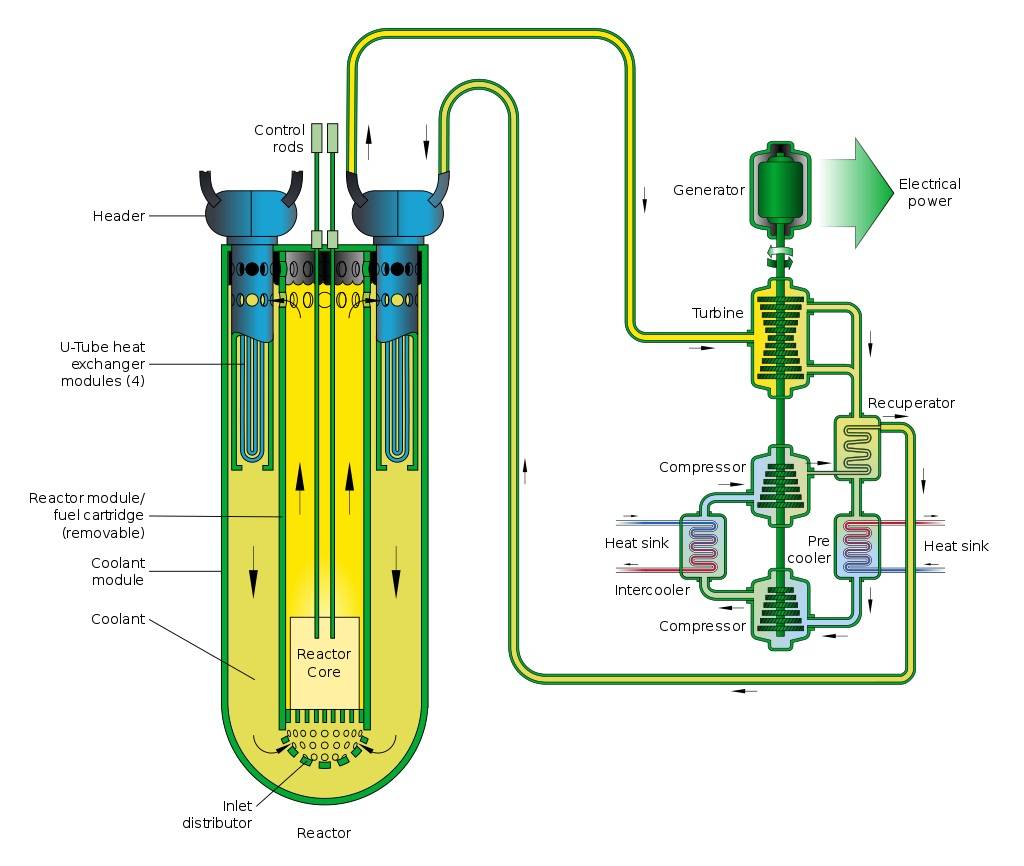
Diagrama de un reactor con un refrigerante de metal líquido, presumiblemente instalado en el Poseidon AUV.
El propio Poseidon AUV también es de interés. Incluso si no consideramos la posibilidad de golpear las naves AUG directamente con la ojiva nuclear del AUV "Poseidon", se puede usar efectivamente para abrir el modo sigiloso AUG.
En el marco de la solución de este problema, en el Poseidon AUV se pueden instalar equipos de reconocimiento y / o equipos para simular las características magnetoacústicas de varios submarinos en lugar de una ojiva nuclear. La masa del Poseidon AUV es de unas 100 toneladas. Esto permitirá acomodar equipos bastante masivos en él, y un reactor nuclear puede proporcionarle la energía necesaria.

AUV "Poseidón"
Tras la detección inicial de AUG mediante reconocimiento espacial mediante imágenes de radar y / o una estela (aunque la pierdan en el futuro), mediante UAV de gran altitud RTR mediante la actividad de aeronaves AWACS (aunque posteriormente sean derribadas) y planeadores submarinos interceptando canales de comunicación Enlace -16 y señales no acústicas, se envían varios AUV condicionales "Poseidon-R" a la supuesta zona del movimiento AUG. Deben moverse a la máxima velocidad, con el mayor cambio brusco e impredecible posible de trayectoria y profundidad de inmersión (hasta 1000 metros).
Por un lado, esto permitirá que la OLP del enemigo detecte el Poseidon-R AUV. Por otro lado, su derrota será difícil debido a su alta velocidad (hasta 110 nudos) y su compleja trayectoria. Periódicamente, a intervalos irregulares, la velocidad del Poseidon-R AUV debe reducirse durante un breve período de tiempo para garantizar el funcionamiento eficiente del GAS.
El enemigo no puede saber que es el Poseidon AUV con una ojiva nuclear o el Poseidon-R AUV realizando la función de reconocimiento. En consecuencia, el enemigo no podrá ignorar esta situación de ninguna manera y se verá obligado a lanzar todas las fuerzas disponibles para destruir el Poseidon-R AUV, para realizar una maniobra de evasión. Esto conducirá al despegue de aviones y helicópteros de la OLP, un aumento en la velocidad de movimiento de los buques de superficie y submarinos, un intercambio de radio intensivo entre ellos, la liberación de boyas hidroacústicas, torpedos y cargas de profundidad.
El alcance del AUV "Poseidon-R", que supera los 10 kilómetros, les permitirá "conducir" el AUG durante días, lo que, como resultado, con una alta probabilidad conducirá a su detección por diversos medios de reconocimiento.
Hallazgos
A mediano plazo, el océano puede estar saturado con una gran cantidad de AUV ligeros: planeadores submarinos capaces de monitorear continuamente el medio ambiente durante varios años, formando una red de reconocimiento distribuida que controla una gran área de la superficie y las profundidades del agua. Esto complicará significativamente la tarea del movimiento encubierto de grupos de ataque navales y portaaviones y, en el futuro, barcos y submarinos individuales.
A su vez, los AUV "pesados" se pueden utilizar como compañeros esclavos para barcos de superficie y submarinos, que pueden utilizarse para reconocimiento, comunicaciones de retransmisión o como plataforma de armas remotas. Asumen los principales riesgos de ser destruidos por el enemigo. En el futuro, muchas misiones de combate del AUV podrán resolverse de forma completamente autónoma. En particular, para realizar comunicaciones de reconocimiento y retransmisión como parte de sistemas de comunicaciones e inteligencia distribuidos centrados en la red.
Las elevadas características técnicas del Poseidon AUV con motor nuclear permiten considerarlo no solo como un instrumento de disuasión nuclear estratégica, sino también como base para la creación de un complejo que se puede utilizar para descubrir la ubicación del AUG.
Juntos, los AUV de varios tipos formarán otra "capa" de reconocimiento que complementa las capacidades del reconocimiento por satélite, los UAV eléctricos estratosféricos y los UAV de clase HALE y MALE de gran altitud / altitud media.
- Andrey mitrofanov
- robotrends.ru
información