Un poco sobre los robots de combate americanos.

Una de las direcciones más prometedoras en el desarrollo de equipos militares son los vehículos controlados a distancia. Dichos vehículos pueden volar, moverse sobre y bajo el agua, y también viajar en tierra, realizando diversas tareas, desde reconocimiento hasta ataques. Dio la casualidad de que se presta la mayor atención a los equipos voladores controlados a distancia: vehículos aéreos no tripulados. Sin embargo, se puede aplicar un enfoque similar a casi cualquier equipo militar, incluido el terrestre. Al mismo tiempo, los sistemas terrestres controlados a distancia no solo existen, sino que también se utilizan activamente en una situación de combate real. Considere los modelos más famosos e interesantes de tales robots Produccion americana
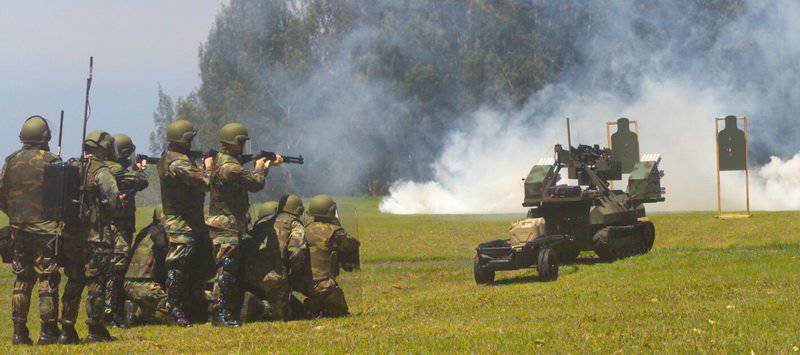
Gladiator
El desarrollo del primer proyecto de robot de combate exitoso en Estados Unidos comenzó en el año 1993. El Pentágono lanzó el programa TUGV (Vehículo terrestre no tripulado táctico - Vehículo terrestre no tripulado táctico), cuyo objetivo era equipar a las unidades de fuerzas especiales con un robot de control remoto ligero multiusos. El aparato TUGV debía ser portador de varios equipos o armas, capaces de acompañar a las unidades de infantería y ayudarlos en el desempeño de las misiones de combate. El proyecto involucró a varias firmas, entre ellas Lockheed Martin y Carnegie Mellon University. Todos ellos presentaron sus versiones del auto, que más tarde se convirtieron en la base de un proyecto en toda regla. Una de las razones de tal "lanzamiento" fue la duda del cliente sobre la apariencia específica del nuevo dispositivo. Vale la pena señalar que el problema más difícil se resolvió al principio. Consistía en el concepto de aplicación y, como resultado, en el diseño del robot. Si se considerara como una herramienta de soporte multipropósito fácil, entonces podría hacerse simple, barato y, al mismo tiempo, desprotegido. Una alternativa a esto fue un robot con reserva antibalas, un motor más potente y un precio correspondiente. Como resultado, el Pentágono eligió el segundo enfoque para la creación de un robot de combate.

La primera versión del robot del proyecto TUGV, llamada Gladiator, se realizó sobre una base de seguimiento. Era un dispositivo pequeño con un sistema de control remoto, una cámara de video y un motor de gasolina de baja potencia. Como arma, podría llevar una ametralladora de calibre de rifle. En general, para mediados de los años noventa, la primera versión del "Gladiador" no era mala, pero había demasiadas quejas. Debido a esto, las empresas participantes en el programa hicieron la segunda opción. Gladiator-2 recibió un chasis de seis ruedas completamente nuevo con un motor diesel. Además, la segunda versión del "Gladiador" estaba equipada con un SWARM de instalación multifunción, diseñado para montar una ametralladora de calibre hasta 12,7 mm. Además de armas El nuevo robot llevaba un sistema de vigilancia diurno y nocturno y lanzagranadas de humo. Todo esto se ubicó en una plataforma estabilizada. La necesidad de instalar unos brazos pequeños serios ha llevado a un aumento en el tamaño de toda la máquina. El peso de combate del segundo "Gladiador" podría alcanzar una tonelada, y las dimensiones geométricas de la máquina sin equipo adicional eran iguales al medidor 1,8x1,35x1,2. La tercera versión del robot Gladiator tenía aún mayor tamaño y peso. Ahora en un estado completamente cargado, el robot pesaba tanto como tres toneladas. Una interesante innovación en el diseño fue la transmisión eléctrica. Esto no llevó a un aumento significativo en la velocidad máxima, pero ayudó a reducir el ruido producido por la máquina mediante el uso de baterías.
La última versión de la máquina Gladiator fue desarrollada por la Universidad Carnegie Mellon, que finalmente recibió una orden para continuar trabajando en la tercera iteración del proyecto. Después de una serie de eventos de mediados de los dos mil años, todo el programa Gladiator se encontró en una posición ambigua relacionada con la reducción de fondos. Con desarrollos favorables, el Pentágono esperaba comprar al menos doscientos de esos robots para ser usados por el Cuerpo de Marines.
Trituradora
Desarrollado a mediados del milésimo. A pedido de DARPA, los miembros del personal de la Universidad Carnegie Mellon han creado una plataforma universal robótica con ruedas. Se supuso que en el futuro este aparato podría utilizarse para realizar diversas tareas en una situación real o, como mínimo, tomarlo como base para nuevos desarrollos. El robot blindado Crusher resultó ser bastante grande (más de cinco metros de longitud y aproximadamente una altura y media) y bastante pesado: el peso máximo en vacío es de aproximadamente seis toneladas. Al mismo tiempo, la masa propia de la plataforma es más de dos veces menor: el hecho es que debido a la naturaleza experimental del proyecto, los diseñadores estadounidenses hicieron de la armadura un elemento separado del complejo. Como resultado, la trituradora puede transportar hasta 3600 un kilogramo de armadura y carga. El cuerpo de la máquina controlada remotamente en sí está hecho de un marco de titanio (marco), aluminio (la mayoría de los detalles de enchapado) y acero (parachoques, etc.).

La movilidad de la trituradora es proporcionada por el tren de rodaje original de seis ruedas, cada uno de los cuales tiene una suspensión independiente. Además de proporcionar depreciación, la suspensión puede cambiar la distancia al suelo de un automóvil de cero a 75 centímetros. Se supone que al cambiar la distancia al suelo, la Trituradora, o un vehículo basado en ella, podrá arrastrarse por los obstáculos o pasar sobre ellos. Naturalmente, siempre que el obstáculo tenga el tamaño adecuado. En el eje de cada rueda hay un motor de tracción con una potencia de aproximadamente 250 caballos de fuerza. Por lo tanto, la potencia total de todos los motores es igual a 1680 HP. El suministro de energía eléctrica de los motores eléctricos se realiza mediante baterías y un generador con una potencia de hasta 58 kilovatio. El último es alimentado por un diesel 72 fuerte. Se eligió la opción con electrotransmisión para garantizar el menor movimiento de ruido: si es necesario, el operador apaga el ruido del diesel y utiliza la carga de la batería. Dependiendo de la carga, las condiciones del terreno y otros factores, la distancia de viaje por carga de la batería puede ser de tres a dieciséis kilómetros a velocidades de hasta 42 km / h. Bajo ciertas condiciones, Crusher puede realizar una marcha continua, cargando las baterías alternativamente y usándolas, hasta que se desarrolle una reserva de combustible.
A bordo de la "trituradora de ruedas" hay un conjunto de equipos que le permite recopilar toda la información necesaria para la gestión. En primer lugar, se trata de cámaras de video, en cuyo campo de visión cae casi todo el hemisferio frontal. Además, varios buscadores de rango láser, acelerómetros, giroscopios, etc. son estándar en la máquina. Toda la información telemétrica se transmite por radio al panel de control. El operador de la máquina trituradora trabaja con los controles, en la mayoría de los casos completamente idénticos a las unidades de automóvil correspondientes. Video y datos sobre velocidad, orientación, etc. Se muestra en seis monitores. En realidad, el control se lleva a cabo con la ayuda del volante, los pedales y algunas similitudes con el pomo del engranaje. El software Crasher proporciona varios algoritmos de trabajo autónomos. En caso de pérdida de la señal de control o a petición del operador, la máquina puede conducir automáticamente a un punto determinado, superando los obstáculos. Por ejemplo, la base donde la Trituradora volverá en caso de problemas de comunicación se puede elegir como punto final.
Durante la etapa final del diseño, el robot Crusher recibió una torreta blindada con una ametralladora de gran calibre y un complejo de reconocimiento. En el segundo caso, se instaló una pequeña torre giratoria con una varilla telescópica, equipada con un sistema de videovigilancia y un equipo de medición y focalización láser, en el lugar de aterrizaje estándar para armamento adicional. Por razones obvias, Crusher se construyó en el número de varias copias y se usó solo como una plataforma para desarrollar nuevas tecnologías. Este paso fue correcto, porque ya en las primeras etapas de la prueba se descubrieron una gran cantidad de problemas, principalmente con el software y la operación conjunta de varios sistemas. Sin embargo, al final de los dos mil años, el proyecto Crusher se recordó y se convirtió en la base de otros desarrollos.
APD
Demostrador de plataforma autónoma: una plataforma de demostración independiente. De hecho, es una continuación del proyecto Crusher. Al emitir los términos de referencia para el APD, la agencia DARPA exigió aumentar la velocidad máxima, mejorar la permeabilidad y garantizar la posibilidad de operación en las tropas. Los dos primeros problemas se resolvieron reemplazando los motores y finalizando el chasis. Como resultado, la velocidad máxima aumentó a 80 km / h. También resolvió varios otros problemas técnicos relacionados con la mejora del rendimiento del demostrador de la plataforma. El hecho es que este robot multipropósito se creó como parte del programa FCS (Sistema de Combate Futuro - Sistema de Combate del Futuro) y se convertiría en un elemento completo del equipo para algunas unidades. Entre otras cosas, DARPA indicó la necesidad de transportar dos complejos de APD en el mismo avión C-130. Por lo tanto, el peso seco de la máquina y el panel de control no deben exceder las toneladas de 8,5-9.

Estructuralmente, el APD es una trituradora bastante modificada. Aproximadamente lo mismo se puede decir sobre el sistema de control. Las diferencias externas de los equipos casi no son perceptibles, pero la parte del software ha experimentado serias mejoras, habiendo recibido algunas grandes oportunidades para acciones autónomas. Según algunas fuentes, en el futuro, los cerebros electrónicos de la APD pueden incluso ser capaces de evaluar el peligro de una situación y luego trasladarse a un lugar más tranquilo. Cabe señalar que no está del todo claro cómo se realizará exactamente esta evaluación. En cuanto al equipo objetivo, la "Plataforma de Demostración Autónoma" puede llevar una torreta con armas o equipo de reconocimiento. Además, existe cierto volumen interno para el transporte de carga.
Después de la abolición del programa FCS, la máquina APD con control remoto estaba en el limbo. Por un lado, ya no se ajusta tan claramente a la imagen en perspectiva de las fuerzas armadas estadounidenses, pero por otro lado, ya se ha invertido mucho dinero y esfuerzo. Como resultado, el proyecto APD cambió su estado y siguió siendo un desarrollo experimental. El desarrollo de la "Plataforma" continúa hasta el presente. Sus creadores argumentan que si los militares vuelven a mostrar interés, entonces el APD puede ir a las tropas para el año de 2020. Sin embargo, el Pentágono aún no ha indicado su intención de cambiar el estado de un proyecto prometedor.
XM1216
Es necesario hacer una advertencia importante: el ejército de EE. UU. No solo ordena vehículos pesados con control remoto. Para una serie de tareas, su tamaño no solo es inútil, sino también dañino, si no peligroso. Por esta razón, la creación de varios proyectos de robots ligeros de fines militares comenzó hace mucho tiempo. Como ejemplo, considere el programa SUGV (Vehículo terrestre no tripulado pequeño - Vehículo terrestre no tripulado pequeño).

En el curso de la implementación del proyecto global FCS, el liderazgo de las fuerzas armadas estadounidenses quería obtener un pequeño vehículo controlado a distancia, principalmente destinado a fines de reconocimiento. El principal requisito para el SUGV era el peso ligero: era necesario garantizar que el aparato pudiera ser transportado por las fuerzas de los soldados. La orden para el desarrollo de tal complejo fue recibida por iRobot, y el proyecto recibió el nombre de ejército XM1216. El diseño de un pequeño robot de reconocimiento se remonta a la línea de robots multiusos PackBot. El XM1216 tiene una unidad de propulsión rastreada conectada a un motor eléctrico. El diseño del tren de rodaje es interesante: además de las dos pistas principales, se instala un par adicional en el robot. Está montado en uno de los extremos de las pistas principales y está diseñado para superar varios obstáculos, para lo cual tiene la capacidad de girar dentro de un sector pequeño. Se pueden utilizar pistas adicionales como palanca para repulsar al escalar o para descender suavemente de cualquier obstáculo.
Todo el equipo objetivo del robot XM1216 consiste en una cámara de video montada en un elevador articulado pequeño. Si es necesario, el robot puede transportar hasta 2,5-3 kg de carga. La señal de la cámara se transmite por radio al complejo de control del operador. El equipo para controlar el robot consiste en una unidad principal con una pequeña pantalla LCD y la propia consola, que se asemeja a los controladores de juego-gamepads de acuerdo con el diseño. El peso total de todos los equipos complejos XM1216 SUGV no supera los kilogramos 15-16, lo que permite transportar tanto la consola como el robot con una sola persona. Para mayor comodidad, todos los sistemas se colocan en una mochila contenedor especial.

En febrero, 2012, el Pentágono completó las pruebas del robot XM1216 y firmó un contrato de suministro. El número exacto de complejos ordenados no fue anunciado, pero hay razones para creer que el puntaje es de decenas o incluso cientos de unidades. La cantidad del acuerdo tampoco se llama.
***
Vale la pena señalar que los robots descritos anteriormente son solo la punta del iceberg. El hecho es que el número total de tipos que se están desarrollando actualmente es igual a varias docenas, y un examen detallado de cada uno por separado llevaría demasiado tiempo. Para los años 2025-30, el Pentágono planea adoptar al menos cien nuevos modelos de robots para diversos propósitos y con diferentes características. Los preparativos para tal equipo de tropas a gran escala ya han comenzado, lo que llevó a la aparición de una gran cantidad de tipos.
En los materiales de los sitios:
http://otvaga2004.ru/
http://globalsecurity.org/
http://usmc.mil/
http://army.mil/
http://dailytech.com/
http://defencetalk.com/
información