Buena suerte y fallas aeronaves hipersónicas.
El trabajo constante para aumentar la velocidad de los aviones a principios de los años sesenta del siglo pasado trajo Aviación a velocidades hipersónicas. El cohete experimental norteamericano X-15 realizó casi doscientos vuelos, la mayoría de los cuales aceleró a una velocidad cinco veces mayor que la del sonido. Tales velocidades prometían grandes perspectivas para los aviones, especialmente los militares. Sin embargo, una serie de características del vuelo hipersónico dificultó la creación de nuevos aviones cohete o dispositivos similares adecuados para su uso práctico.
El ejemplo más sorprendente de la dificultad de crear tales estructuras fueron los proyectos soviéticos y estadounidenses "Spiral" y Boeing X-20 Dyna-Soar. Durante estos proyectos, ambos países realizaron mucha investigación, construyeron varios aviones experimentales y dedicaron mucho tiempo y esfuerzo. Sin embargo, la "Espiral" y X-20 no volaban. La complejidad, el alto costo y las perspectivas poco claras finalmente llevaron al cierre de ambos proyectos y a las cambiantes prioridades de los clientes potenciales. Para una comprensión más completa de esa situación, vale la pena echar un vistazo más de cerca a Spiral, X-20 y otros proyectos de una época posterior.
"Luchador" americano
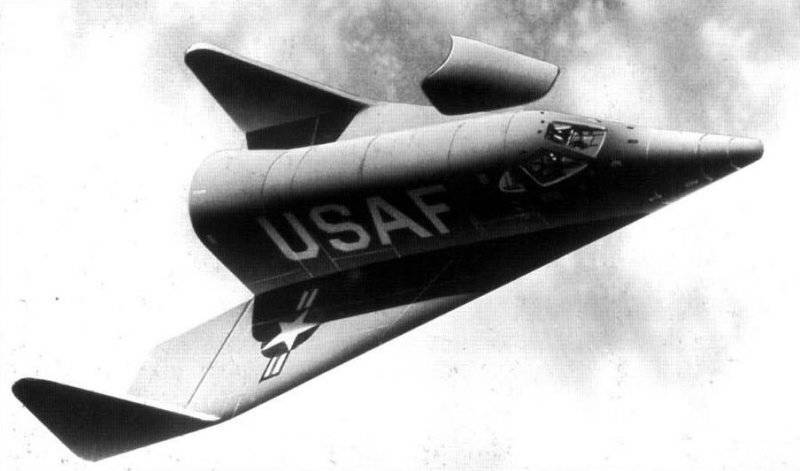
En 1957, Estados Unidos lanzó el programa X-20 Dyna-Soar, cuyo objetivo era crear un plano orbital tripulado multifuncional. Dependiendo de la necesidad táctica, se suponía que el X-20 debía realizar el reconocimiento de los objetivos enemigos, atacarlos o destruir a los orbitadores enemigos, incluidos los aviones similares a este. Independientemente de la tarea táctica, el Dyna-Soar tenía una gran ventaja sobre los aviones tradicionales: los sistemas antiaéreos existentes y futuros, por definición, no podían derribarlos. Por lo tanto, el enemigo solo tendría que observar el vuelo de X-20 con la ayuda del radar y ser consciente de su impotencia.
Ya al inicio del trabajo en el proyecto X-20, se formaron dos métodos de su posible aplicación. El primero, llamado boost-glide (aceleración y planificación) significaba llevar un plano orbital a una altura de aproximadamente 150-160 kilómetros sobre el suelo, después de lo cual se convirtió en un vuelo de planificación. Dado que durante el vuelo utilizando el método boost-glide, la velocidad de la nave no debería exceder la primera velocidad espacial, siempre permanecería a la distancia requerida desde la superficie del planeta, pero no se arriesgaría a volar al espacio. Después de alcanzar la altura deseada con un acelerador de aceleración, se suponía que el dispositivo debía ir al área objetivo y realizar un descenso a una altura de aproximadamente 50-60 kilómetros. En la parte inferior de la trayectoria, se suponía que Dyna-Soar debía fotografiar objetos o aliviar la carga de combate. Además, al tener una velocidad alta, la aeronave volvería a una mayor altitud, aunque una más pequeña en comparación con la inicial. Con la ayuda del constante "buceo" en la atmósfera de X-20, según los cálculos de los especialistas de la compañía Boeing, en unas pocas horas podría rodar alrededor de la Tierra y sentarse en el aeródromo cerca del lugar de lanzamiento. Cabe destacar que el X-20 en la configuración para el vuelo de planeo no estaba planeado para equiparse con motores. Todas las maniobras que el dispositivo tuvo que realizar únicamente debido al "intercambio" de altitud para la velocidad y la espalda.
La segunda aplicación X-20 fue diseñada para interceptar satélites u otras naves espaciales. En este caso, después de colocar el dispositivo en órbita, se acopló una etapa superior especial, que le permitió maniobrar. Dicha configuración permitiría a Dyna-Soar estar en órbita durante varios días, para maniobrar, detectar y destruir naves espaciales enemigas. Al final de la tarea, la etapa superior tuvo que dar un impulso de frenado y transferir el X-20 a la trayectoria de descenso. Se suponía que un interceptor basado en X-20 estaba equipado con una estación de radar para detectar objetivos enemigos, así como con armas de misiles para su destrucción.
Inicialmente, varias compañías afirmaron el desarrollo de la nave espacial Dyna-Soar, pero al final se eligió a Boeing. En su versión, el prometedor avión espacial se veía así. El dispositivo con una longitud de casi 11 medidores tenía un ala delta con un lapso de 6,2 M. El ala de barrido grande estaba ubicada directamente debajo del fuselaje y en ciertas etapas del vuelo debía realizar la función de un freno aerodinámico. El control del aparato durante el aterrizaje se debería haber realizado usando elevones en el borde trasero del ala y dos quillas con timones ubicados en las puntas de las consolas. El fuselaje estaba dispuesto de una manera interesante. En la parte delantera había electrónica y volantes dinámicos a gas. Detrás del compartimento del instrumento se encontraba la cabina del piloto. Un "volante espacial" podría controlar completamente todos los sistemas de un plano orbital. Se propuso que los controles X-20 se hicieran por analogía con las aeronaves convencionales: perillas de control de balanceo y inclinación, así como pedales. El control de la etapa superior en la versión del interceptor de espacio fue planeado para llevarse a cabo utilizando un panel de control separado. Para salvar al piloto, se propuso usar un asiento de expulsión con un motor de combustible sólido. Sin embargo, no importa cuánto lo intentaron los ingenieros de Boeing, no lograron brindar rescate a altas velocidades, comenzando con M = 1,5-2. Inmediatamente detrás de la cabina había un compartimiento de carga en el que era posible colocar armas que pesaban hasta mil libras (aproximadamente 450 kg). Finalmente, la popa del fuselaje se dio debajo de las unidades de acoplamiento con la plataforma superior o el vehículo de lanzamiento.
Debido a las enormes velocidades de diseño, al volar en la atmósfera, el X-20 tuvo que acelerar a 7-7,5 kilómetros por segundo: el diseño del fuselaje consistió exclusivamente en metales y aleaciones refractarios. Cabe destacar que la protección de la estructura contra el sobrecalentamiento debería haberse realizado exclusivamente mediante la liberación de energía térmica en forma de radiación. No se proporcionaron materiales de absorción de calor o de combustión gradual. El acristalamiento de la cabina durante casi toda la duración del vuelo se cerró con un carenado especial. Por lo tanto, el piloto podría inspeccionar el ambiente a través del vidrio solo durante el aterrizaje, cuando se dejó caer el carenado. Para el aterrizaje, el X-20 fue planeado para ser equipado con un tren de aterrizaje de esquí triciclo.
El primer vuelo del X-20 tuvo lugar en el año 1964. Menos de un año después, estaba previsto lanzar el primer Dyna-Soar con el piloto a bordo. Los autores del proyecto lograron construir varias maquetas de varios sistemas, seleccionaron seis pilotos de prueba y comenzaron a prepararse para la construcción del prototipo. Sin embargo, después de varios años de controversia, el ejército estadounidense dejó de ver la necesidad de una máquina X-20. En su opinión, el lanzamiento de tal avión era demasiado complicado y costoso. Por lo tanto, se le dio una mayor prioridad al proyecto de la estación orbital MOL, y luego a Skylab. El programa X-20 se cerró por desesperanza. Parte de la tecnología se utilizó posteriormente en el desarrollo de nuevas naves espaciales reutilizables.
"Espiral" soviética
Aproximadamente simultáneamente con el cierre del proyecto Dyna-Soar en el otro lado del planeta, el trabajo activo acaba de comenzar en un proyecto similar. Al mismo tiempo, los diseñadores soviéticos de la Oficina de Diseño A.I. Mikoyan bajo el liderazgo de G.E. Lozino-Lozinsky eligió una forma ligeramente diferente de entregar un avión orbital de combate a la altura de trabajo. En lugar de un cohete portador, costoso de fabricar, desechable y que requiere instalaciones de lanzamiento relativamente complejas, se propuso utilizar un avión esparcidor especial. Tuvo que elevar el orbitador a una cierta altura, acelerarlo a velocidad hipersónica y reiniciarlo. A continuación, el plano orbital con la ayuda de un cohete adicional fue llevado a la altura de trabajo, donde podía realizar su tarea. Por lo tanto, de todo el sistema Espiral, solo el acelerador orbitador era desechable. Todos los demás elementos del complejo sano y salvo volvieron y pudieron usarse de nuevo.

A pesar del hecho de que la parte principal del complejo Espiral era un plano orbital, el más interesante es el plano esparcidor. Tuvo que hacer un vuelo hipersónico en la atmósfera terrestre, que es su principal "punto culminante". El plano de aceleración hipersónico (GDS), también conocido como "50-50", se suponía que debía proporcionar una altura de aproximadamente 30 kilómetros y una aceleración preliminar del plano orbital con su acelerador. Estructuralmente, el "50-50" era un medidor 38 sin cola con un ala triangular de barrido variable con un tramo de 16,5 my arandelas de quilla en los extremos de las consolas. Para el flujo correcto, el ala había desarrollado nódulos que alcanzaban la nariz del fuselaje y tenían un barrido del orden de 80 °. Aproximadamente dos tercios de la longitud de la aeronave, este parámetro cambió dramáticamente y luego el borde frontal del ala tuvo un barrido en 60 °. El fuselaje, apuntado en la parte de la nariz, se expandió gradualmente y en la parte de la cola era una estructura con una sección transversal cercana a la rectangular. En la parte trasera del fuselaje, se planeó colocar un bloque de cuatro motores, cuyas tomas de aire estaban ubicadas en la superficie inferior del fuselaje, ligeramente detrás del punto de barrido.
Especial atención son los motores del GDS. Para equipar la oficina de diseño de aeronaves AM. Cradle recibió el encargo de desarrollar nuevos motores de turborreactores que funcionen con hidrógeno líquido. Se eligió este combustible debido a la posibilidad de enfriamiento adicional de las cuchillas del motor. Debido a esta característica, la TRD del esquema tradicional podría operar a altas velocidades y producir más energía sin el riesgo de dañar la estructura. Además, para optimizar la velocidad del aire en la entrada a la entrada, la superficie inferior del fuselaje tenía una forma especial. Como resultado de todas estas medidas, se suponía que los motores potenciales emitían cada 17,5-18 toneladas de empuje cada uno y proporcionaban al conjunto de Spiral una velocidad de aproximadamente 6М.
Desafortunadamente, la creación de nuevos motores de hidrógeno se retrasó fuertemente. Como resultado, en una cierta etapa del programa Spiral, comenzó la creación de un motor de turborreactor de queroseno con parámetros aceptables de empuje y consumo de combustible. Sin embargo, en la configuración de "queroseno", el avión 50-50 ya no podía acelerar a una velocidad seis veces mayor que la velocidad del sonido. Sin el uso de combustible de hidrógeno, su velocidad se redujo en casi una vez y media. Vale la pena señalar que, según los cálculos de los diseñadores, los materiales y las tecnologías disponibles en ese momento podrían proporcionar vuelo a ambas velocidades, por lo que los motores fueron el principal problema para crear una aeronave hipersónica de pleno derecho.
La construcción del prototipo GSR se planeó originalmente para principios de los años setenta. Sin embargo, una serie de problemas tecnológicos y estructurales no resueltos llevaron primero a una revisión de los plazos y luego al cierre del proyecto. Hasta finales de los años setenta, continuaron los trabajos sobre varios elementos del proyecto Spiral. En primer lugar, se prestó especial atención al propio plano orbital, para probar las tecnologías y el diseño de los cuales se crearon y probaron varios dispositivos experimentales. Sin embargo, los problemas con una hélice de avión hipersónica y el cambio de prioridades en el desarrollo de sistemas espaciales reutilizables llevaron al cierre de todo el programa.
Tiempo de exito
Parece que todos los esfuerzos desplegados por los superpoderes en los proyectos de aviones hipersónicos, con el tiempo comenzaron a dar los primeros frutos. Así, en los años ochenta, Fakel Design Bureau y CIAM trabajaron juntos en un ramjet para un prometedor avión hipersónico. Las pruebas completas de un motor de este tipo en el suelo eran simplemente imposibles, así que tuve que crear un laboratorio "frío". La base de este sistema fueron los misiles antiaéreos 5ХNUMX, tomados del sistema de defensa aérea C-28В y adecuados para la velocidad de vuelo. En la fabricación del laboratorio volador, la ojiva fue desmantelada del cohete original, y la unidad de frío se instaló en su lugar. Además, el complejo tenía que incluir un camión cisterna especialmente diseñado para trabajar con hidrógeno líquido.

La unidad consistía en un tanque de combustible para hidrógeno líquido, líneas de combustible, un sistema de control y un motor E-57 hipersónico. Debido a las características de diseño, este motor podría funcionar solo en altitudes de al menos 15 kilómetros y a velocidades dentro de M = 3,5-6,5. El módulo Cold transportaba una cantidad de combustible relativamente pequeña, calculada para 60-80 segundos de vuelo, dependiendo del modo. Todos los vuelos de prueba de "Frío" se llevaron a cabo de acuerdo con el mismo esquema: se lanzó el cohete, que aceleró el módulo a la velocidad del motor de chorro, y, según el programa de vuelo, se lanzó. Desde 1991 a 1999, se realizaron un total de siete vuelos de prueba en el año, en tres de los cuales el motor de flujo directo funcionó de acuerdo con el programa establecido. La duración máxima del vuelo con el motor encendido fue 77 segundos, y después de analizar los datos de telemetría, quedó claro que el motor seguía funcionando incluso después de generar la cantidad total de combustible.

Otro proyecto doméstico, posiblemente exitoso, fue el tema de GEL (Hypersonic Experimental Aircraft) o X-90. Se sabe que este proyecto se creó en el MKB "Rainbow" a fines de los años ochenta y luego se demostró en varias exposiciones de aviación. Al mismo tiempo, hay evidencia de la terminación del trabajo en el proyecto en el año 1992, es decir, Antes del primer espectáculo al público en general. El aparato GELA era un misil de crucero con un ala triangular y un fuselaje plegables, casi completamente entregado a un motor de chorro. Al parecer, para garantizar el flujo de aire requerido en la entrada a la entrada de aire, el cohete estaba equipado con un carenado especial en forma de cuña. Con una masa inicial de aproximadamente 15 toneladas, el cohete X-90 probablemente podría acelerar a una velocidad de al menos M = 4,5. Hasta ahora, no hay información confiable sobre los resultados del proyecto GEL. Según algunas fuentes, un misil de crucero experimentado fue lanzado desde un avión por primera vez a fines de los años ochenta, y un poco más tarde realizó su primer vuelo hipersónico. Sin embargo, no hay una confirmación probada y notable de esto.
En el extranjero, la creación de nuevas aeronaves hipersónicas se desarrolló aproximadamente al mismo ritmo que en nuestro país, y no hubo mucho éxito hasta cierto tiempo. El "punto de inflexión" fue el proyecto Boeing X-43. Exteriormente, este avión se parecía en cierto modo al GEL ruso. Debido al uso de un motor ramjet, nuevamente fue necesario usar un cono de punta que optimice el flujo frente a la toma de aire. En la sección de la cola, el X-43 tenía dos pequeñas alas estabilizadoras y dos quillas. En junio, 2001, este drone hipersónico realizó su primer vuelo, que no tuvo éxito. Debido a problemas con el sistema de control, el dispositivo fue destruido al ser ordenado desde el suelo. El segundo vuelo se realizó sin problemas, y en el tercero, en 2004 del año, el avión no tripulado estableció un récord, acelerando a una velocidad del orden de 11200 kilómetros por hora, alrededor de M = 9,5-9,6.


El desarrollo del proyecto X-43 fue el cohete X-51. Se está creando con una base para el futuro y, a largo plazo, debe ser una de las principales armas de la aviación estratégica estadounidense. Este misil de crucero repite algunos de los elementos de la apariencia de los aviones hipersónicos anteriores, pero tiene un fuselaje menos ancho. Según los datos oficiales, el cohete X-51 debería poder volar a una velocidad del orden de M = 6-7. Tales velocidades son necesarias para un posible uso en el llamado sistema. Rápida huelga global. A finales de mayo, 2010, el X-51, por primera vez, salió volando. Casi todo el programa de vuelo se completó con éxito, pero al final los evaluadores tuvieron que dar la orden de autodestruirse debido a un mal funcionamiento en algunos sistemas de cohetes. El segundo y tercer lanzamiento, en la primavera de 2011 y en el verano de 2012, no tuvieron ningún éxito. En este momento, al comienzo de 2013, los empleados de Boeing están preparando un cuarto lanzamiento de prueba, que será decisivo en el futuro del programa. Si el cohete realiza al menos una parte del programa planificado, el trabajo continuará. En caso de un inicio fallido, el proyecto, posiblemente, se cerrará.
El secreto de su fracaso.
Como puede ver, después del legendario X-15, el número de proyectos exitosos de aviones hipersónicos se puede contar con los dedos de una mano. Al mismo tiempo, ya ha transcurrido medio siglo desde los vuelos suborbitales del avión cohete estadounidense. Tratemos de lidiar con los problemas existentes y sus causas.
Primero hay que recordar el tema del costo. Alcanzar nuevos picos, que en este caso son velocidades hipersónicas, siempre requiere una inversión de tiempo y, lo más importante, dinero. Como resultado, todos los desarrollos avanzados, incluidos los de la industria hipersónica, terminan en financiamiento. Además, casi todos los demás problemas relacionados con el desarrollo de dicho equipo están directamente relacionados con el financiamiento.
La segunda pregunta es quizás la más voluminosa y compleja. Esto es tecnología. El principal problema en la creación del plan de cohete X-15 y todos los dispositivos hipersónicos posteriores fue la creación y el dominio de la producción de nuevas aleaciones resistentes al calor. Por ejemplo, algunas áreas de la superficie exterior del X-15 durante las etapas se calentaron hasta los grados 600-650. En consecuencia, el cohete X-51 que vuela a velocidades aún más altas debería tener elementos estructurales más resistentes al calor. En el ejemplo del proyecto "50-50" también puede ver la dificultad de crear una planta de energía para un avión hipersónico. Inicialmente, se suponía que debía equipar a este avión con motores turbofan que funcionaban con hidrógeno, pero la complejidad de crear un motor de este tipo, especialmente diseñado para funcionar a velocidades hipersónicas, finalmente fue forzada a abandonarlo y volver al sistema habitual de "queroseno". Después de tal transición, la tasa máxima de GSR se redujo significativamente, lo que debería haber tenido un impacto en todas las características del complejo Espiral.
Aparte de la tecnología en general, vale la pena quedarse en electrónica. Es bastante obvio que la respuesta humana es simplemente insuficiente para controlar efectivamente un avión hipersónico que vuela a velocidad de crucero. Por lo tanto, la mayoría de las tareas, por ejemplo, la estabilización en vuelo, deben asignarse a la automatización, que puede analizar simultáneamente la masa de parámetros y emitir comandos al sistema de control. Cabe señalar que en la situación actual con el rápido desarrollo de las tecnologías digitales, un sistema de control automático de este tipo para una aeronave ya no es una tarea muy compleja. Además, en el futuro es posible crear sistemas completamente autónomos que no solo puedan realizar el conjunto de tareas de antemano, sino también adaptar sus acciones a la situación actual.
Una consecuencia directa de la creación de tales sistemas puede ser la eliminación del complejo de la parte más frágil y poco confiable de la misma: la persona. Al mismo tiempo, la aparición de sistemas totalmente autónomos está esperando no solo a los científicos involucrados en la creación de aviones hipersónicos. La inteligencia artificial no es la primera década, es el sueño de muchas personas, pero hasta ahora algunos avances en esta área no nos permiten esperar la rápida creación de una computadora totalmente autónoma que pueda reemplazar a las personas. En cuanto al control desde el control remoto, esta forma de eliminar a una persona del costado del dispositivo no parece demasiado realista. Al volar a velocidades hipersónicas, el aire alrededor del dispositivo puede calentarse a un estado de plasma y filtrar todas las señales de radio. Por lo tanto, el UAV en modo crucero no podrá recibir comandos del operador ni enviarle ninguna información. Como resultado, la administración solo es posible de dos maneras: una persona a bordo o un sistema totalmente autónomo, cuyas capacidades corresponden plenamente a las tareas presentadas. No hace falta decir que, en la actualidad, la persona tiene el mayor potencial para adaptarse a la situación y la electrónica todavía no puede competir en igualdad de condiciones con él.
Finalmente, la infraestructura. El avión del proyecto X-20 requirió la creación de un cosmódromo especial desde el cual podría despegar usando un vehículo de lanzamiento. Por supuesto, para él sería posible asignar una plataforma de lanzamiento separada, pero el posible uso militar tendría una apariencia completamente indecente. Primero, para garantizar el nivel adecuado de protección contra las naves espaciales enemigas, sería necesario mantener varios Dyno-Soars en servicio al mismo tiempo. Es bastante costoso e inseguro debido al hecho de que los vehículos de lanzamiento con combustible estarán en la plataforma de lanzamiento abierta a todos los vientos y otros fenómenos meteorológicos desagradables. En segundo lugar, para no causar daños a otros programas espaciales, no será posible seleccionar simplemente una o dos plataformas de lanzamiento de las existentes. Tendremos que construir nuevas instalaciones que sean bastante vulnerables a las armas de ataque del enemigo. Finalmente, en algunos casos, por ejemplo, en defensa de misiles, los "combatientes espaciales" pueden no tener tiempo para alcanzar la línea de intercepción y perder varias ojivas de misiles enemigos. A todos estos problemas, también vale la pena agregar el alto costo del programa en sí, la construcción de aparatos e infraestructura para ellos, así como el alto costo del servicio permanente.

El avión de overclocking soviético 50-50 sería un poco más conveniente a este respecto. Cuando se utiliza queroseno, no se requiere ningún equipo especial de combustible de aeródromo. Sin embargo, la versión de hidrógeno del proyectil ya no podría funcionar sin la presencia de un equipo correspondiente de reabastecimiento de combustible, complejo de combustible, etc. en el aeródromo. Sistemas diseñados para trabajar con hidrógeno licuado. Proyectos como el X-43 de los EE. UU. Y el X-51 de los EE. UU., En la medida en que se conoce, requieren menos equipos especiales. En cualquier caso, mientras se encontraban en las etapas de prueba, los aeródromos, que se estaban preparando para los lanzamientos de prueba, no se modernizaron seriamente. Al mismo tiempo, el uso real del misil serie X-51 puede requerir ciertos cambios en la infraestructura de las bases militares, pero por el momento no se puede decir cuáles serán.
En general, las razones objetivas dificultan el rápido desarrollo de los aviones hipersónicos. El progreso, complejo en sí mismo, se ve obstaculizado por una serie de problemas característicos de este tipo de tecnología. Por lo tanto, en los próximos años, definitivamente no vale la pena esperar la aparición de una aeronave hipersónica totalmente apta para uso práctico. Recientemente, hay rumores de que en medio del 2013 actual, los militares e ingenieros rusos comenzarán a probar algún tipo de avión que pueda viajar a velocidades hipersónicas. Cualquier información detallada sobre este proyecto, así como el hecho de su existencia, aún no se ha anunciado oficialmente. Si estos rumores son ciertos, de todos modos en los próximos años, el proyecto será puramente científico y experimental. La aparición del primer avión hipersónico en serie, con capacidades prácticamente aplicables, debe atribuirse al período posterior al año 2020 o incluso más tarde.
En los materiales de los sitios:
http://astronautix.com/
http://ntrs.nasa.gov/
http://buran.ru/
http://testpilot.ru/
http://aviationweek.com/
http://globalsecurity.org/
http://airwar.ru/
El ejemplo más sorprendente de la dificultad de crear tales estructuras fueron los proyectos soviéticos y estadounidenses "Spiral" y Boeing X-20 Dyna-Soar. Durante estos proyectos, ambos países realizaron mucha investigación, construyeron varios aviones experimentales y dedicaron mucho tiempo y esfuerzo. Sin embargo, la "Espiral" y X-20 no volaban. La complejidad, el alto costo y las perspectivas poco claras finalmente llevaron al cierre de ambos proyectos y a las cambiantes prioridades de los clientes potenciales. Para una comprensión más completa de esa situación, vale la pena echar un vistazo más de cerca a Spiral, X-20 y otros proyectos de una época posterior.
"Luchador" americano
En 1957, Estados Unidos lanzó el programa X-20 Dyna-Soar, cuyo objetivo era crear un plano orbital tripulado multifuncional. Dependiendo de la necesidad táctica, se suponía que el X-20 debía realizar el reconocimiento de los objetivos enemigos, atacarlos o destruir a los orbitadores enemigos, incluidos los aviones similares a este. Independientemente de la tarea táctica, el Dyna-Soar tenía una gran ventaja sobre los aviones tradicionales: los sistemas antiaéreos existentes y futuros, por definición, no podían derribarlos. Por lo tanto, el enemigo solo tendría que observar el vuelo de X-20 con la ayuda del radar y ser consciente de su impotencia.
Ya al inicio del trabajo en el proyecto X-20, se formaron dos métodos de su posible aplicación. El primero, llamado boost-glide (aceleración y planificación) significaba llevar un plano orbital a una altura de aproximadamente 150-160 kilómetros sobre el suelo, después de lo cual se convirtió en un vuelo de planificación. Dado que durante el vuelo utilizando el método boost-glide, la velocidad de la nave no debería exceder la primera velocidad espacial, siempre permanecería a la distancia requerida desde la superficie del planeta, pero no se arriesgaría a volar al espacio. Después de alcanzar la altura deseada con un acelerador de aceleración, se suponía que el dispositivo debía ir al área objetivo y realizar un descenso a una altura de aproximadamente 50-60 kilómetros. En la parte inferior de la trayectoria, se suponía que Dyna-Soar debía fotografiar objetos o aliviar la carga de combate. Además, al tener una velocidad alta, la aeronave volvería a una mayor altitud, aunque una más pequeña en comparación con la inicial. Con la ayuda del constante "buceo" en la atmósfera de X-20, según los cálculos de los especialistas de la compañía Boeing, en unas pocas horas podría rodar alrededor de la Tierra y sentarse en el aeródromo cerca del lugar de lanzamiento. Cabe destacar que el X-20 en la configuración para el vuelo de planeo no estaba planeado para equiparse con motores. Todas las maniobras que el dispositivo tuvo que realizar únicamente debido al "intercambio" de altitud para la velocidad y la espalda.
La segunda aplicación X-20 fue diseñada para interceptar satélites u otras naves espaciales. En este caso, después de colocar el dispositivo en órbita, se acopló una etapa superior especial, que le permitió maniobrar. Dicha configuración permitiría a Dyna-Soar estar en órbita durante varios días, para maniobrar, detectar y destruir naves espaciales enemigas. Al final de la tarea, la etapa superior tuvo que dar un impulso de frenado y transferir el X-20 a la trayectoria de descenso. Se suponía que un interceptor basado en X-20 estaba equipado con una estación de radar para detectar objetivos enemigos, así como con armas de misiles para su destrucción.
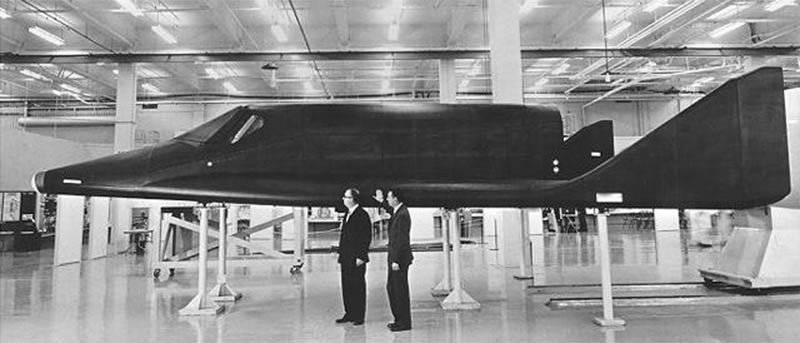
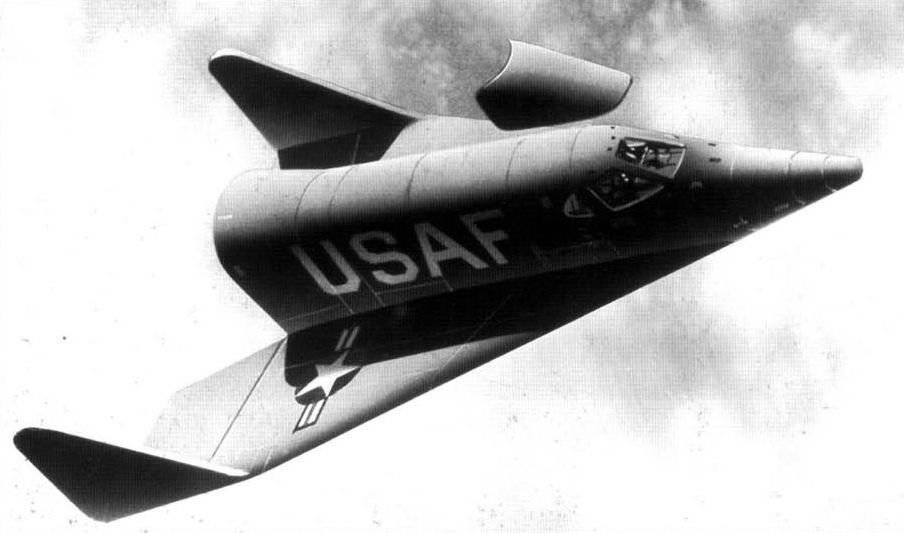
Inicialmente, varias compañías afirmaron el desarrollo de la nave espacial Dyna-Soar, pero al final se eligió a Boeing. En su versión, el prometedor avión espacial se veía así. El dispositivo con una longitud de casi 11 medidores tenía un ala delta con un lapso de 6,2 M. El ala de barrido grande estaba ubicada directamente debajo del fuselaje y en ciertas etapas del vuelo debía realizar la función de un freno aerodinámico. El control del aparato durante el aterrizaje se debería haber realizado usando elevones en el borde trasero del ala y dos quillas con timones ubicados en las puntas de las consolas. El fuselaje estaba dispuesto de una manera interesante. En la parte delantera había electrónica y volantes dinámicos a gas. Detrás del compartimento del instrumento se encontraba la cabina del piloto. Un "volante espacial" podría controlar completamente todos los sistemas de un plano orbital. Se propuso que los controles X-20 se hicieran por analogía con las aeronaves convencionales: perillas de control de balanceo y inclinación, así como pedales. El control de la etapa superior en la versión del interceptor de espacio fue planeado para llevarse a cabo utilizando un panel de control separado. Para salvar al piloto, se propuso usar un asiento de expulsión con un motor de combustible sólido. Sin embargo, no importa cuánto lo intentaron los ingenieros de Boeing, no lograron brindar rescate a altas velocidades, comenzando con M = 1,5-2. Inmediatamente detrás de la cabina había un compartimiento de carga en el que era posible colocar armas que pesaban hasta mil libras (aproximadamente 450 kg). Finalmente, la popa del fuselaje se dio debajo de las unidades de acoplamiento con la plataforma superior o el vehículo de lanzamiento.
Debido a las enormes velocidades de diseño, al volar en la atmósfera, el X-20 tuvo que acelerar a 7-7,5 kilómetros por segundo: el diseño del fuselaje consistió exclusivamente en metales y aleaciones refractarios. Cabe destacar que la protección de la estructura contra el sobrecalentamiento debería haberse realizado exclusivamente mediante la liberación de energía térmica en forma de radiación. No se proporcionaron materiales de absorción de calor o de combustión gradual. El acristalamiento de la cabina durante casi toda la duración del vuelo se cerró con un carenado especial. Por lo tanto, el piloto podría inspeccionar el ambiente a través del vidrio solo durante el aterrizaje, cuando se dejó caer el carenado. Para el aterrizaje, el X-20 fue planeado para ser equipado con un tren de aterrizaje de esquí triciclo.
El primer vuelo del X-20 tuvo lugar en el año 1964. Menos de un año después, estaba previsto lanzar el primer Dyna-Soar con el piloto a bordo. Los autores del proyecto lograron construir varias maquetas de varios sistemas, seleccionaron seis pilotos de prueba y comenzaron a prepararse para la construcción del prototipo. Sin embargo, después de varios años de controversia, el ejército estadounidense dejó de ver la necesidad de una máquina X-20. En su opinión, el lanzamiento de tal avión era demasiado complicado y costoso. Por lo tanto, se le dio una mayor prioridad al proyecto de la estación orbital MOL, y luego a Skylab. El programa X-20 se cerró por desesperanza. Parte de la tecnología se utilizó posteriormente en el desarrollo de nuevas naves espaciales reutilizables.
"Espiral" soviética
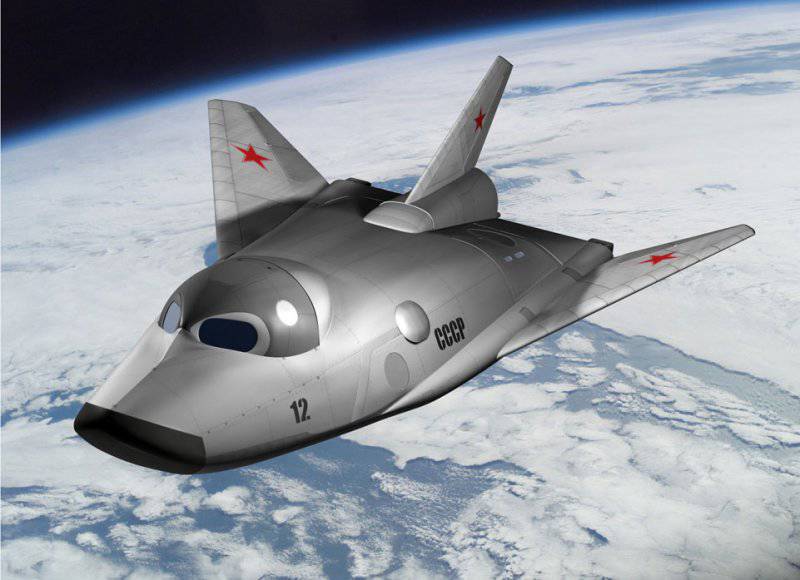
Aproximadamente simultáneamente con el cierre del proyecto Dyna-Soar en el otro lado del planeta, el trabajo activo acaba de comenzar en un proyecto similar. Al mismo tiempo, los diseñadores soviéticos de la Oficina de Diseño A.I. Mikoyan bajo el liderazgo de G.E. Lozino-Lozinsky eligió una forma ligeramente diferente de entregar un avión orbital de combate a la altura de trabajo. En lugar de un cohete portador, costoso de fabricar, desechable y que requiere instalaciones de lanzamiento relativamente complejas, se propuso utilizar un avión esparcidor especial. Tuvo que elevar el orbitador a una cierta altura, acelerarlo a velocidad hipersónica y reiniciarlo. A continuación, el plano orbital con la ayuda de un cohete adicional fue llevado a la altura de trabajo, donde podía realizar su tarea. Por lo tanto, de todo el sistema Espiral, solo el acelerador orbitador era desechable. Todos los demás elementos del complejo sano y salvo volvieron y pudieron usarse de nuevo.

A pesar del hecho de que la parte principal del complejo Espiral era un plano orbital, el más interesante es el plano esparcidor. Tuvo que hacer un vuelo hipersónico en la atmósfera terrestre, que es su principal "punto culminante". El plano de aceleración hipersónico (GDS), también conocido como "50-50", se suponía que debía proporcionar una altura de aproximadamente 30 kilómetros y una aceleración preliminar del plano orbital con su acelerador. Estructuralmente, el "50-50" era un medidor 38 sin cola con un ala triangular de barrido variable con un tramo de 16,5 my arandelas de quilla en los extremos de las consolas. Para el flujo correcto, el ala había desarrollado nódulos que alcanzaban la nariz del fuselaje y tenían un barrido del orden de 80 °. Aproximadamente dos tercios de la longitud de la aeronave, este parámetro cambió dramáticamente y luego el borde frontal del ala tuvo un barrido en 60 °. El fuselaje, apuntado en la parte de la nariz, se expandió gradualmente y en la parte de la cola era una estructura con una sección transversal cercana a la rectangular. En la parte trasera del fuselaje, se planeó colocar un bloque de cuatro motores, cuyas tomas de aire estaban ubicadas en la superficie inferior del fuselaje, ligeramente detrás del punto de barrido.
Especial atención son los motores del GDS. Para equipar la oficina de diseño de aeronaves AM. Cradle recibió el encargo de desarrollar nuevos motores de turborreactores que funcionen con hidrógeno líquido. Se eligió este combustible debido a la posibilidad de enfriamiento adicional de las cuchillas del motor. Debido a esta característica, la TRD del esquema tradicional podría operar a altas velocidades y producir más energía sin el riesgo de dañar la estructura. Además, para optimizar la velocidad del aire en la entrada a la entrada, la superficie inferior del fuselaje tenía una forma especial. Como resultado de todas estas medidas, se suponía que los motores potenciales emitían cada 17,5-18 toneladas de empuje cada uno y proporcionaban al conjunto de Spiral una velocidad de aproximadamente 6М.

Desafortunadamente, la creación de nuevos motores de hidrógeno se retrasó fuertemente. Como resultado, en una cierta etapa del programa Spiral, comenzó la creación de un motor de turborreactor de queroseno con parámetros aceptables de empuje y consumo de combustible. Sin embargo, en la configuración de "queroseno", el avión 50-50 ya no podía acelerar a una velocidad seis veces mayor que la velocidad del sonido. Sin el uso de combustible de hidrógeno, su velocidad se redujo en casi una vez y media. Vale la pena señalar que, según los cálculos de los diseñadores, los materiales y las tecnologías disponibles en ese momento podrían proporcionar vuelo a ambas velocidades, por lo que los motores fueron el principal problema para crear una aeronave hipersónica de pleno derecho.
La construcción del prototipo GSR se planeó originalmente para principios de los años setenta. Sin embargo, una serie de problemas tecnológicos y estructurales no resueltos llevaron primero a una revisión de los plazos y luego al cierre del proyecto. Hasta finales de los años setenta, continuaron los trabajos sobre varios elementos del proyecto Spiral. En primer lugar, se prestó especial atención al propio plano orbital, para probar las tecnologías y el diseño de los cuales se crearon y probaron varios dispositivos experimentales. Sin embargo, los problemas con una hélice de avión hipersónica y el cambio de prioridades en el desarrollo de sistemas espaciales reutilizables llevaron al cierre de todo el programa.
Tiempo de exito
Parece que todos los esfuerzos desplegados por los superpoderes en los proyectos de aviones hipersónicos, con el tiempo comenzaron a dar los primeros frutos. Así, en los años ochenta, Fakel Design Bureau y CIAM trabajaron juntos en un ramjet para un prometedor avión hipersónico. Las pruebas completas de un motor de este tipo en el suelo eran simplemente imposibles, así que tuve que crear un laboratorio "frío". La base de este sistema fueron los misiles antiaéreos 5ХNUMX, tomados del sistema de defensa aérea C-28В y adecuados para la velocidad de vuelo. En la fabricación del laboratorio volador, la ojiva fue desmantelada del cohete original, y la unidad de frío se instaló en su lugar. Además, el complejo tenía que incluir un camión cisterna especialmente diseñado para trabajar con hidrógeno líquido.

La unidad consistía en un tanque de combustible para hidrógeno líquido, líneas de combustible, un sistema de control y un motor E-57 hipersónico. Debido a las características de diseño, este motor podría funcionar solo en altitudes de al menos 15 kilómetros y a velocidades dentro de M = 3,5-6,5. El módulo Cold transportaba una cantidad de combustible relativamente pequeña, calculada para 60-80 segundos de vuelo, dependiendo del modo. Todos los vuelos de prueba de "Frío" se llevaron a cabo de acuerdo con el mismo esquema: se lanzó el cohete, que aceleró el módulo a la velocidad del motor de chorro, y, según el programa de vuelo, se lanzó. Desde 1991 a 1999, se realizaron un total de siete vuelos de prueba en el año, en tres de los cuales el motor de flujo directo funcionó de acuerdo con el programa establecido. La duración máxima del vuelo con el motor encendido fue 77 segundos, y después de analizar los datos de telemetría, quedó claro que el motor seguía funcionando incluso después de generar la cantidad total de combustible.
Otro proyecto doméstico, posiblemente exitoso, fue el tema de GEL (Hypersonic Experimental Aircraft) o X-90. Se sabe que este proyecto se creó en el MKB "Rainbow" a fines de los años ochenta y luego se demostró en varias exposiciones de aviación. Al mismo tiempo, hay evidencia de la terminación del trabajo en el proyecto en el año 1992, es decir, Antes del primer espectáculo al público en general. El aparato GELA era un misil de crucero con un ala triangular y un fuselaje plegables, casi completamente entregado a un motor de chorro. Al parecer, para garantizar el flujo de aire requerido en la entrada a la entrada de aire, el cohete estaba equipado con un carenado especial en forma de cuña. Con una masa inicial de aproximadamente 15 toneladas, el cohete X-90 probablemente podría acelerar a una velocidad de al menos M = 4,5. Hasta ahora, no hay información confiable sobre los resultados del proyecto GEL. Según algunas fuentes, un misil de crucero experimentado fue lanzado desde un avión por primera vez a fines de los años ochenta, y un poco más tarde realizó su primer vuelo hipersónico. Sin embargo, no hay una confirmación probada y notable de esto.
En el extranjero, la creación de nuevas aeronaves hipersónicas se desarrolló aproximadamente al mismo ritmo que en nuestro país, y no hubo mucho éxito hasta cierto tiempo. El "punto de inflexión" fue el proyecto Boeing X-43. Exteriormente, este avión se parecía en cierto modo al GEL ruso. Debido al uso de un motor ramjet, nuevamente fue necesario usar un cono de punta que optimice el flujo frente a la toma de aire. En la sección de la cola, el X-43 tenía dos pequeñas alas estabilizadoras y dos quillas. En junio, 2001, este drone hipersónico realizó su primer vuelo, que no tuvo éxito. Debido a problemas con el sistema de control, el dispositivo fue destruido al ser ordenado desde el suelo. El segundo vuelo se realizó sin problemas, y en el tercero, en 2004 del año, el avión no tripulado estableció un récord, acelerando a una velocidad del orden de 11200 kilómetros por hora, alrededor de M = 9,5-9,6.

Boeing X-43

Boeing X-51
El desarrollo del proyecto X-43 fue el cohete X-51. Se está creando con una base para el futuro y, a largo plazo, debe ser una de las principales armas de la aviación estratégica estadounidense. Este misil de crucero repite algunos de los elementos de la apariencia de los aviones hipersónicos anteriores, pero tiene un fuselaje menos ancho. Según los datos oficiales, el cohete X-51 debería poder volar a una velocidad del orden de M = 6-7. Tales velocidades son necesarias para un posible uso en el llamado sistema. Rápida huelga global. A finales de mayo, 2010, el X-51, por primera vez, salió volando. Casi todo el programa de vuelo se completó con éxito, pero al final los evaluadores tuvieron que dar la orden de autodestruirse debido a un mal funcionamiento en algunos sistemas de cohetes. El segundo y tercer lanzamiento, en la primavera de 2011 y en el verano de 2012, no tuvieron ningún éxito. En este momento, al comienzo de 2013, los empleados de Boeing están preparando un cuarto lanzamiento de prueba, que será decisivo en el futuro del programa. Si el cohete realiza al menos una parte del programa planificado, el trabajo continuará. En caso de un inicio fallido, el proyecto, posiblemente, se cerrará.
El secreto de su fracaso.
Como puede ver, después del legendario X-15, el número de proyectos exitosos de aviones hipersónicos se puede contar con los dedos de una mano. Al mismo tiempo, ya ha transcurrido medio siglo desde los vuelos suborbitales del avión cohete estadounidense. Tratemos de lidiar con los problemas existentes y sus causas.
Primero hay que recordar el tema del costo. Alcanzar nuevos picos, que en este caso son velocidades hipersónicas, siempre requiere una inversión de tiempo y, lo más importante, dinero. Como resultado, todos los desarrollos avanzados, incluidos los de la industria hipersónica, terminan en financiamiento. Además, casi todos los demás problemas relacionados con el desarrollo de dicho equipo están directamente relacionados con el financiamiento.
La segunda pregunta es quizás la más voluminosa y compleja. Esto es tecnología. El principal problema en la creación del plan de cohete X-15 y todos los dispositivos hipersónicos posteriores fue la creación y el dominio de la producción de nuevas aleaciones resistentes al calor. Por ejemplo, algunas áreas de la superficie exterior del X-15 durante las etapas se calentaron hasta los grados 600-650. En consecuencia, el cohete X-51 que vuela a velocidades aún más altas debería tener elementos estructurales más resistentes al calor. En el ejemplo del proyecto "50-50" también puede ver la dificultad de crear una planta de energía para un avión hipersónico. Inicialmente, se suponía que debía equipar a este avión con motores turbofan que funcionaban con hidrógeno, pero la complejidad de crear un motor de este tipo, especialmente diseñado para funcionar a velocidades hipersónicas, finalmente fue forzada a abandonarlo y volver al sistema habitual de "queroseno". Después de tal transición, la tasa máxima de GSR se redujo significativamente, lo que debería haber tenido un impacto en todas las características del complejo Espiral.
Aparte de la tecnología en general, vale la pena quedarse en electrónica. Es bastante obvio que la respuesta humana es simplemente insuficiente para controlar efectivamente un avión hipersónico que vuela a velocidad de crucero. Por lo tanto, la mayoría de las tareas, por ejemplo, la estabilización en vuelo, deben asignarse a la automatización, que puede analizar simultáneamente la masa de parámetros y emitir comandos al sistema de control. Cabe señalar que en la situación actual con el rápido desarrollo de las tecnologías digitales, un sistema de control automático de este tipo para una aeronave ya no es una tarea muy compleja. Además, en el futuro es posible crear sistemas completamente autónomos que no solo puedan realizar el conjunto de tareas de antemano, sino también adaptar sus acciones a la situación actual.
Una consecuencia directa de la creación de tales sistemas puede ser la eliminación del complejo de la parte más frágil y poco confiable de la misma: la persona. Al mismo tiempo, la aparición de sistemas totalmente autónomos está esperando no solo a los científicos involucrados en la creación de aviones hipersónicos. La inteligencia artificial no es la primera década, es el sueño de muchas personas, pero hasta ahora algunos avances en esta área no nos permiten esperar la rápida creación de una computadora totalmente autónoma que pueda reemplazar a las personas. En cuanto al control desde el control remoto, esta forma de eliminar a una persona del costado del dispositivo no parece demasiado realista. Al volar a velocidades hipersónicas, el aire alrededor del dispositivo puede calentarse a un estado de plasma y filtrar todas las señales de radio. Por lo tanto, el UAV en modo crucero no podrá recibir comandos del operador ni enviarle ninguna información. Como resultado, la administración solo es posible de dos maneras: una persona a bordo o un sistema totalmente autónomo, cuyas capacidades corresponden plenamente a las tareas presentadas. No hace falta decir que, en la actualidad, la persona tiene el mayor potencial para adaptarse a la situación y la electrónica todavía no puede competir en igualdad de condiciones con él.
Finalmente, la infraestructura. El avión del proyecto X-20 requirió la creación de un cosmódromo especial desde el cual podría despegar usando un vehículo de lanzamiento. Por supuesto, para él sería posible asignar una plataforma de lanzamiento separada, pero el posible uso militar tendría una apariencia completamente indecente. Primero, para garantizar el nivel adecuado de protección contra las naves espaciales enemigas, sería necesario mantener varios Dyno-Soars en servicio al mismo tiempo. Es bastante costoso e inseguro debido al hecho de que los vehículos de lanzamiento con combustible estarán en la plataforma de lanzamiento abierta a todos los vientos y otros fenómenos meteorológicos desagradables. En segundo lugar, para no causar daños a otros programas espaciales, no será posible seleccionar simplemente una o dos plataformas de lanzamiento de las existentes. Tendremos que construir nuevas instalaciones que sean bastante vulnerables a las armas de ataque del enemigo. Finalmente, en algunos casos, por ejemplo, en defensa de misiles, los "combatientes espaciales" pueden no tener tiempo para alcanzar la línea de intercepción y perder varias ojivas de misiles enemigos. A todos estos problemas, también vale la pena agregar el alto costo del programa en sí, la construcción de aparatos e infraestructura para ellos, así como el alto costo del servicio permanente.
El avión de overclocking soviético 50-50 sería un poco más conveniente a este respecto. Cuando se utiliza queroseno, no se requiere ningún equipo especial de combustible de aeródromo. Sin embargo, la versión de hidrógeno del proyectil ya no podría funcionar sin la presencia de un equipo correspondiente de reabastecimiento de combustible, complejo de combustible, etc. en el aeródromo. Sistemas diseñados para trabajar con hidrógeno licuado. Proyectos como el X-43 de los EE. UU. Y el X-51 de los EE. UU., En la medida en que se conoce, requieren menos equipos especiales. En cualquier caso, mientras se encontraban en las etapas de prueba, los aeródromos, que se estaban preparando para los lanzamientos de prueba, no se modernizaron seriamente. Al mismo tiempo, el uso real del misil serie X-51 puede requerir ciertos cambios en la infraestructura de las bases militares, pero por el momento no se puede decir cuáles serán.
En general, las razones objetivas dificultan el rápido desarrollo de los aviones hipersónicos. El progreso, complejo en sí mismo, se ve obstaculizado por una serie de problemas característicos de este tipo de tecnología. Por lo tanto, en los próximos años, definitivamente no vale la pena esperar la aparición de una aeronave hipersónica totalmente apta para uso práctico. Recientemente, hay rumores de que en medio del 2013 actual, los militares e ingenieros rusos comenzarán a probar algún tipo de avión que pueda viajar a velocidades hipersónicas. Cualquier información detallada sobre este proyecto, así como el hecho de su existencia, aún no se ha anunciado oficialmente. Si estos rumores son ciertos, de todos modos en los próximos años, el proyecto será puramente científico y experimental. La aparición del primer avión hipersónico en serie, con capacidades prácticamente aplicables, debe atribuirse al período posterior al año 2020 o incluso más tarde.
En los materiales de los sitios:
http://astronautix.com/
http://ntrs.nasa.gov/
http://buran.ru/
http://testpilot.ru/
http://aviationweek.com/
http://globalsecurity.org/
http://airwar.ru/
información