UAV discreta cubierta
Cuando en el campo de pruebas de Occidente hay una demostración exitosa de la nueva tecnología no tripulada de aviones no tripulados, en el Ministerio de Defensa de Rusia, el nivel de robo sin castigo ya supera los miles de millones de dólares. Paradójicamente, pero el hecho es: cuanto mayor es el nivel de robo en la industria militar y de defensa de Rusia, más en la mente de algunos de los representantes de la dirección militar-industrial del país hay optimismo y determinación para "alcanzar y superar a América" en las áreas de vanguardia de la ciencia y la tecnología, que afectan radicalmente En el desarrollo de la última tecnología militar.

El final de 2012 fue un gran éxito para la Marina de los Estados Unidos y Northrop Grumman. En el programa para la creación del complejo de aviones de reconocimiento y ataque no tripulados (RUAC) basado en portaaviones UCLASS (Unmanned Carrier Launched Airborne Surveillance and Strike), se han elaborado las siguientes etapas, acercando a los desarrolladores el inicio de las pruebas de vuelo de demostradores de este sistema en un portaaviones en 2013. Para ello, se están creando dos prototipos (AV-1 y AV-2) del vehículo aéreo no tripulado (UAV) X-47B, desarrollado por Northrop Grumman y que representan hoy las plataformas experimentales no tripuladas más avanzadas que sirven como prototipo de las prometedoras RUAC, que en 10 años puede aparecer en las composiciones de cubierta aviación grupos basados en portaaviones de propulsión nuclear de la Marina de los EE. UU.
Nuevo avión del Pentágono
A mediados de los 90, el Pentágono comenzó a trabajar en el concepto de UAV, diseñado principalmente para misiones de combate. La Fuerza Aérea y la Marina de los EE. UU. han lanzado dos programas de demostración de percusión separados. drones tipo UCAV (Vehículo de combate aéreo no tripulado). Para la Fuerza Aérea, Boeing desarrolló el demostrador X-45, y para la Armada flota este programa fue designado UCAV-N (Vehículo de combate aéreo no tripulado - Armada), en el que Northrop Grumman y Boeing trabajaron en dos proyectos competidores separados: el X-47 Pegasus y el X-46, respectivamente. Sin embargo, en junio de 2003, el departamento de defensa de EE. UU. Decidió combinar los dos conceptos para la Fuerza Aérea y la Armada en un programa J-UCAS (Sistema Aéreo de Combate No Tripulado Conjunto) bajo la dirección de la Agencia de Proyectos de Investigación Avanzada de Defensa (DARPA). El propósito de tal fusión y transformación del trabajo en curso fue la necesidad de crear un sistema ofensivo universal, en el que los componentes de aviación y tierra se adaptarían para realizar misiones de combate especiales. Luego, en diciembre de 2004, se ordenó a la DARPA que transfiriera el control de todos los recursos del programa J-UCAS a la Fuerza Aérea de los Estados Unidos. Sin embargo, todas las reordenaciones y transformaciones no dieron un resultado positivo, y esta dirección se cerró en 2006. Para entonces, el programa de I + D había gastado más de $ 1,45 millones, lo que lo convierte en uno de los vehículos no tripulados más costosos jamás implementados por el Pentágono.
Sin embargo, la Armada no abandonó la idea de introducir nuevos tipos de aviones en las composiciones de sus ya poderosos grupos de aviación naval y en mayo 2010 realizó una solicitud de información sobre el UAV de la plataforma UCAV, que más tarde se llamó UCLASS, para las principales corporaciones de defensa de los Estados Unidos. La idea que ocuparon los jefes de los estrategas navales de Estados Unidos fue la siguiente. Hizo falta un complejo de ataque de reconocimiento discreto capaz, a fines de 2018, para operar en conjunto con aviones de cabina tripulados como parte del grupo de aviones de portaaviones. El RUAC propuesto, que consta de cuatro a seis vehículos aéreos no tripulados (UAV), debe actuar de forma autónoma con los portaaviones CVN-68 Nimitz y Gerald Ford CVN-78, debe estar en el aire sin reabastecer de combustible las horas 11 - 14, y también ser capaz de reponer el combustible del reabastecimiento de combustible de aeronaves. en los sistemas "cono de manguera" o "depósito de combustible de varilla de llenado".
Una característica distintiva importante del sistema UCLASS fue su misión de operar en el espacio aéreo bien protegido por los sistemas de defensa aérea, lo que significa que el UAV debería tener un bajo nivel de visibilidad de radar por analogía con la versión de plataforma del caza F-35C de quinta generación.
Los contratos para el desarrollo de este concepto de la Armada se entregaron a las compañías General Atomix Aeronautical Systems, Lockheed Martin y Northrop Grumman.
Pero ahora estamos más interesados en el concepto X-47B propuesto por Northrop Grumman, ya que sus dos manifestantes están construidos, vuelan y se están preparando para los vuelos de prueba en el portaaviones nuclear Harry Truman. La compañía recibió un contrato de la Armada para producir un modelo de un sistema aéreo no tripulado de demostración de sistema de aviones de combate no tripulados (UCAS-D) en agosto 2007. Como parte del programa de desarrollo y las pruebas de vuelo de dos demostradores X-47B con dimensiones de caza, se obtendrá la experiencia necesaria, que se planea utilizar en el programa competitivo posterior para crear para la Armada de los Estados Unidos un UCLASS RUAK no tripulado basado en la cubierta.
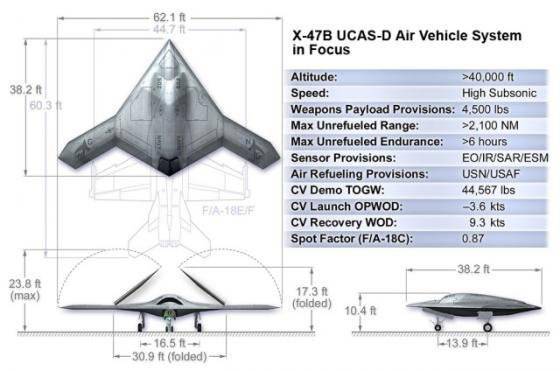
La versión X-47B es una versión mejorada del dispositivo X-47A UCAV-N, está hecha con un diseño aerodinámico sin cola, tiene una longitud de medidores 11 y una envergadura de 18,9. El aumento de la envergadura del ala en combinación con el turborreactor Pratt & Whitney F100-220U permite que el modelo permanezca en el aire durante nueve horas y proporciona una distancia de kilómetros 2960. Las consolas del ala delta del dispositivo se hacen plegadas, lo que reduce su tamaño y proporciona una base en el portaaviones.

Opción marina
El primer vuelo exitoso del X-47B se realizó el 2011 del año de febrero en el Dryden Flight Test Center en la base de Edwards (California) de la Fuerza Aérea de los EE. UU. Y luego, en junio, el 2012 se envió a la Estación Aérea Naval del Río Patuxent (Maryland) para Llevando a cabo la siguiente etapa de pruebas.
Un mes después, en julio 29, hubo un segundo vuelo allí. Según lo informado por el comando de los sistemas de aviación de las fuerzas navales, el demostrador de UAV despegó del aeródromo y estuvo en el aire 35 minutos, la altitud de los metros 2300 y la velocidad 330 kilómetros por hora.
Este vuelo sobre la Bahía de Chesapeake abrió el programa de prueba de vuelo X-47B, en el cual se debe confirmar la compatibilidad del modelo con los procedimientos de vuelo estándar en la cubierta y su equipo de aterrizaje. El espacio aéreo aquí permite a los desarrolladores de UAV realizar vuelos de prueba sin ninguna restricción hasta la transferencia del programa de vuelo al portaaviones en el año 2013.
Uno de los complejos de prueba en la estación de aviación simula las condiciones del portaaviones y permite a los desarrolladores verificar que el UAV está listo para las pruebas en el mar, en particular, para probar la posibilidad de un despegue con la ayuda de una catapulta y un acercamiento y aterrizaje con un aerodinámico hasta que se realicen las pruebas reales en la cubierta.
A fines de noviembre de este año, el primer lanzamiento del X-47B se llevó a cabo en el río Patuxent utilizando una catapulta de vapor en tierra costera, después de lo cual el dispositivo realizó un vuelo de prueba sobre la bahía de Chesapeake. La misión de vuelo permitió la ejecución de varias maniobras que simulan un programa de vuelo UAV cuando aterrizan en la cubierta de un portaaviones en la trayectoria de planeo deseada. Según Darel Martis, director de pruebas de vuelo del demostrador UCAS-D en Northrop Grumman, este lanzamiento es un paso muy importante en el programa de prueba, ya que la capacidad de controlar con precisión el dispositivo mediante una CDU inalámbrica (Unidad de control remoto), que jugará un papel importante en las operaciones futuras con X-47B en el barco. Entre estas operaciones están el rodaje del UAV, su movimiento a la catapulta de la cubierta y su acoplamiento, el desacoplamiento del aerofinador después del aterrizaje y la salida rápida de la plataforma de aterrizaje.
El equipo combinado de especialistas navales y la compañía de desarrollo Northrop Grumman continuarán los vuelos terrestres durante las próximas semanas antes del lanzamiento del segundo demostrador de UAV X-47B a bordo del portaaviones atómico CVN-75 Harry Harman. Estos trabajos se llevarán a cabo hasta el final del año, y en 2013, se planea iniciar vuelos desde la cubierta, continuándolos en 2014 año con pruebas de vuelo para el reabastecimiento de combustible autónomo de X-47B en el aire utilizando el programa AAR (Reaprovisionamiento de aire autónomo) utilizando una barra y un cono de repostaje.
En el curso de este programa, las tecnologías necesarias para la posterior creación del RUAK no tripulado de bajo perfil sin tripulación se probarán de manera consistente. Para 2020, la Armada planea comenzar a operar en el portaaviones del primer escuadrón de vehículos aéreos no tripulados de reconocimiento, que tiene las dimensiones de un caza de cubierta.
En la etapa inicial de las pruebas de cubierta en diciembre del demostrador X-47B, se planea verificar la compatibilidad del dispositivo con las operaciones estándar realizadas con el grupo de aeronaves basado en el portaaviones. Para ello, el barco está equipado con el equipo y el software adecuados. De acuerdo con el programa de comando de los sistemas de aviación de la Armada de los EE. UU., Los vehículos aéreos no tripulados realizarán varios rodajes en la cubierta de un portaaviones, así como otras operaciones.
Las pruebas de demostración de vuelo X-47B programadas para el año 2013 incluyen que el demostrador UCAS-D despegue y aterrice en la cubierta de un portaaviones, ubique el vehículo en el espacio aéreo controlado por el servicio de control de tráfico aéreo de la aeronave y realice otras operaciones regulares con este modelo.
Como parte del programa UCAS-D, 2013 tiene previsto probar la posibilidad de que un demostrador X-47B autónomo y discreto funcione de manera segura desde un portaaviones, incluido el despegue y el aterrizaje, después de lo cual su repostaje autónomo en el aire se llevará a cabo en el 2014-m.
Anticipándose a las pruebas en el mar, los desarrolladores probaron el control del dispositivo en la cubierta del barco utilizando un dispositivo de visualización portátil inalámbrico CDU (Control Display Unit), que permitirá a los operadores maniobrar el UAV en un portaaviones a través del control remoto. . El trabajo se llevó a cabo a principios de noviembre en la Estación Aérea Naval de EE. UU. Patuxent River y demostró la capacidad de maniobrar con seguridad el dispositivo en una cubierta llena de otras aeronaves, con control inalámbrico. El programa de prueba preveía controlar el empuje del motor UAV, realizar el rodaje en tierra, salir del dispositivo a la catapulta y conectarse con él, así como mover zumbido en la zona de aterrizaje simulado después de que se complete el aterrizaje.
El operador de cubierta X-47B trabajará en conjunto con el jefe de la cabina de vuelo de un portaaviones cuando realice operaciones para cambiar su posición en la nave utilizando un dispositivo CDU. El líder de vuelo utilizará los comandos manuales tradicionales para mostrar cómo la unidad puede moverse a lo largo de la cubierta. El operador con el dispositivo de control planea estar detrás del director de vuelo y usar la CDU para duplicar los comandos manuales y transmitirlos al UAV en forma digital a través de un enlace inalámbrico.
Otras tareas que X-47B debe realizar en el aire también se están desarrollando con éxito. En particular, se realizaron una serie de pruebas de vuelo para demostrar la tecnología que puede ayudar a aumentar el alcance y la duración del vuelo de los posibles vehículos aéreos no tripulados basados en la cubierta de aviones no tripulados al realizar operaciones de reconocimiento o ataque.
Estas pruebas demostraron las capacidades del hardware y software creados que pueden ayudar a X-47B a realizar reabastecimiento de combustible autónomo en el aire de AAR (reabastecimiento de combustible aéreo autónomo) en el año 2014. Como informó la compañía Northrop Grumman, durante las pruebas de vuelo del programa AAR, las funciones del X-47B drone BLAH fueron realizadas por su simulador, el avión “Lidzhet” de la compañía Kalspan. El avión K707 de Omega Air Reefwell Company se usó como un petrolero. Demostró la posibilidad de reabastecerse de combustible con dos métodos utilizados por la Marina de los EE. UU. Y la Fuerza Aérea. En el primer caso, se trataba de un sistema de "cono de manguera", y en el segundo, la recepción de combustible de otros dispositivos utilizando una barra de combustible. En pruebas, la transferencia de combustible en el aire entre la aeronave no se llevó a cabo.
En el "Lirjet" se instalaron equivalentes funcionales del sistema de navegación, el procesador del sistema de control de vuelo y el sistema de revisión del hemisferio delantero, que el X-47B utilizará cuando realice operaciones de repostaje en el aire. El avión no tenía un cuello de llenado o un receptor. El K707 era casi idéntico al avión KC-135 de la Fuerza Aérea de los EE. UU. Y está equipado con un cono de llenado.
En cada sesión de entrenamiento de reabastecimiento de combustible en el aire, el simulador del UAV "Lidzhet" se retiró para eliminar aproximadamente 1,6 kilómetros del petrolero. El piloto luego transfirió el control de la aeronave al procesador de a bordo del X-47B, proporcionando control de vuelo autónomo y controlando el simulador de la aeronave durante la prueba.
Durante una operación regular de "reabastecimiento de combustible", el operador a bordo del K707 o el líder de vuelo en tierra emitieron órdenes al "Lirjet" al pasar cada posición principal al repostar en el aire: controlar la posición del contacto detrás del petrolero al reabastecerse de combustible, posición después del reabastecimiento de combustible.
A bordo del X-47B, se utilizará un sistema de navegación visual por satélite híbrido junto con un sistema de control de vuelo autónomo, que permitirá determinar y mantener con precisión la distancia entre el tanque y la unidad que se va a repostar.
Northrop Grumman y la Marina planean realizar pruebas adicionales en el programa AAR utilizando el mismo avión, cuando el hardware y el software X-47B probados en las pruebas de vuelo estén listos.

Equivalente europeo
La implementación del programa para crear vehículos aéreos no tripulados para drones en los Estados Unidos está bajo el escrutinio de las principales compañías aeroespaciales europeas. Nadie en Europa quiere que Estados Unidos haga un largo camino para crear las últimas tecnologías que estarán en demanda en futuros conflictos militares. En la actualidad, la industria de defensa de Francia y Alemania está tratando de evitar la compra de los tambores estadounidenses MQ-9 "Ripper" (Reaper) de la compañía "General Atomics" (General Atomics). Estos dos países europeos están considerando la adquisición conjunta de gran parte de este modelo para un uso conjunto adicional. Sin embargo, los fondos disponibles destinados a la compra de vehículos aéreos no tripulados estadounidenses, con toda probabilidad, pueden retirarse del programa para financiar el desarrollo del avión no tripulado europeo, lo que lo pondrá en una posición difícil. Para demostrar a los gobiernos de sus países la disponibilidad de tecnologías similares en el campo de los vehículos no tripulados militares, así como para ejercer cierta presión sobre el liderazgo político-militar de Francia y Alemania, el 1 2012 del año en el sitio francés de Istries se realizó el tan esperado primer vuelo del manifestante del dron europeo UAV Neuron. .
El contratista principal de este programa, la empresa francesa de fabricación de aviones Dassault Aviation (Dassault Aviation), así como un grupo de empresas subcontratistas de cinco países europeos, esperan que el primer vuelo de Neuron sirva como un tipo de catalizador y obligue a los gobiernos de los países que participan en el proyecto a combinar esfuerzos y coordinar Sus acciones en el desarrollo de su propio vehículo no tripulado. El primer paso en esta dirección podría ser la decisión de construir un nuevo modelo, el Neuron-2, que tendría una configuración más avanzada y permitiría pruebas intensivas de tropas de las capacidades de un posible UAV de ataque.
Además del programa Neuron, Dassault Aviation, junto con los British BAE Systems (BAE Systems), explorará la posibilidad de crear un UAV de combate anglo-francés prometedor, así como un drone de longitud media del tipo MALE (Long-Altitude Long-Endurance ).
El UAV Neuron realizó el primer vuelo de 25 minutos, en el que se evaluaron los siguientes pasos básicos: rodaje automático del vehículo a lo largo de la pista, manteniéndolo en el medio de la pista, despegando, aterrizando y aterrizando, corriendo a lo largo de un carril a alta velocidad, Rendimiento en el aire de varias vueltas, escalar, bucear suavemente. Las pruebas se realizaron en el rango de posibles regímenes de vuelo, y la velocidad del dispositivo alcanzó 277 kilómetros por hora, y la altura - metros 610.
Ahora está previsto que el modelo se transfiera al Centro de Electrónica de Sistemas de Armas (Center de l'Electronique de l'Armement) de la Delegación General para Armamentos de Francia DGA para realizar estudios de cuatro meses de sus signos de separación en varios rangos del espectro electromagnético (radar, infrarrojo, ultravioleta, óptico, etc.) En una cámara anecoica especial. Una vez finalizado este trabajo, el UAV será devuelto a Istres, donde en abril 2013 comenzará el programa de sus pruebas de vuelo, que en medio de 2014 finalizarán con el lanzamiento de bombas guiadas desde el compartimiento interno de armas. Se planea que los bombardeos en un escenario de combate simulado se lleven a cabo en un objetivo terrestre detectado, identificado y capturado para acompañar a los sensores de drones a bordo de dispositivos ópticos electrónicos e infrarrojos. El dispositivo se está preparando para realizar pruebas no solo en Francia, sino también en Suecia e Italia, y cada vez que los sitios de prueba midan su nivel de visibilidad en diferentes rangos del espectro electromagnético cuando trabajan con sistemas nacionales de defensa aérea y otros sistemas de armas. En total, durante las pruebas de vuelo, el UAV Neuron realizará aproximadamente cien vuelos, cada uno de los cuales tendrá una duración de al menos una hora.
El programa de creación de tecnología de demostración de la tecnología de aviones no tripulados Neuron se anunció en 2003, y el contrato correspondiente por un valor aproximado de 400 millones de euros se emitió al final de 2005. Aproximadamente la mitad de esta cantidad vino a Francia (Dassault Aviation y Thales), mientras que los fondos restantes se distribuyeron entre otros participantes del programa: Grecia (HAI), Italia (Alenia Aermacchi), Suecia (SAAB), España (EADS-CASA), Suiza (RUAG).
El control sobre la implementación del programa está a cargo de la Dirección General de Armamentos de Francia DGA, el contratista principal es Dassault Aviation, que subcontrata directamente con sus socios industriales. La organización del trabajo no permite la duplicación, los trabajos contratados están diseñados para utilizar solo aquellos conocimientos que ya se encuentran en las reservas científicas y técnicas de los participantes del programa, y no para desarrollos prometedores. Este enfoque, como señalan los expertos, es fundamentalmente nuevo para los programas conjuntos europeos y garantiza la disciplina financiera y tecnológica durante la implementación del proyecto.
A diferencia de la mayoría de los otros vehículos aéreos no tripulados que ya están en funcionamiento, el Neuron no es un vehículo a control remoto, pero realiza una tarea preprogramada sin ingresar ningún comando adicional desde el suelo. El rol del operador en tierra es observar el progreso del vuelo y confirmar cada etapa exitosa, aunque si es necesario puede ingresar al circuito de comando y tomar el control.
Los participantes del proyecto consideran el vuelo UAV totalmente autónomo como el más óptimo en condiciones de combate, ya que esto permitirá que el dron de combate realice la tarea incluso si la línea de datos de comando está inhabilitada por una interferencia intensa. En el caso del tipo de aeronave a control remoto RPV (Vehículo pilotado a distancia), están programados para una inmersión vertical y destrucción al golpear el suelo en caso de fallo del canal de control de vuelo.
La masa de la "Neurona": seco - cinco, la carga útil - dos (combustible y armas) y el máximo despegue - siete toneladas. El dispositivo puede estar en el aire durante aproximadamente tres horas, volando a una velocidad correspondiente al número M = 0,8, en altitudes de hasta 3000 metros.
Con respecto al nivel de visibilidad del UAV, los representantes oficiales de Dassault Aviation lo compararon con el auge, y señalaron que la magnitud de la superficie de dispersión efectiva se explorará desde diferentes ángulos durante los próximos meses de prueba de 18.
Leer más: http://vpk-news.ru/articles/13673

El final de 2012 fue un gran éxito para la Marina de los Estados Unidos y Northrop Grumman. En el programa para la creación del complejo de aviones de reconocimiento y ataque no tripulados (RUAC) basado en portaaviones UCLASS (Unmanned Carrier Launched Airborne Surveillance and Strike), se han elaborado las siguientes etapas, acercando a los desarrolladores el inicio de las pruebas de vuelo de demostradores de este sistema en un portaaviones en 2013. Para ello, se están creando dos prototipos (AV-1 y AV-2) del vehículo aéreo no tripulado (UAV) X-47B, desarrollado por Northrop Grumman y que representan hoy las plataformas experimentales no tripuladas más avanzadas que sirven como prototipo de las prometedoras RUAC, que en 10 años puede aparecer en las composiciones de cubierta aviación grupos basados en portaaviones de propulsión nuclear de la Marina de los EE. UU.
Nuevo avión del Pentágono
A mediados de los 90, el Pentágono comenzó a trabajar en el concepto de UAV, diseñado principalmente para misiones de combate. La Fuerza Aérea y la Marina de los EE. UU. han lanzado dos programas de demostración de percusión separados. drones tipo UCAV (Vehículo de combate aéreo no tripulado). Para la Fuerza Aérea, Boeing desarrolló el demostrador X-45, y para la Armada flota este programa fue designado UCAV-N (Vehículo de combate aéreo no tripulado - Armada), en el que Northrop Grumman y Boeing trabajaron en dos proyectos competidores separados: el X-47 Pegasus y el X-46, respectivamente. Sin embargo, en junio de 2003, el departamento de defensa de EE. UU. Decidió combinar los dos conceptos para la Fuerza Aérea y la Armada en un programa J-UCAS (Sistema Aéreo de Combate No Tripulado Conjunto) bajo la dirección de la Agencia de Proyectos de Investigación Avanzada de Defensa (DARPA). El propósito de tal fusión y transformación del trabajo en curso fue la necesidad de crear un sistema ofensivo universal, en el que los componentes de aviación y tierra se adaptarían para realizar misiones de combate especiales. Luego, en diciembre de 2004, se ordenó a la DARPA que transfiriera el control de todos los recursos del programa J-UCAS a la Fuerza Aérea de los Estados Unidos. Sin embargo, todas las reordenaciones y transformaciones no dieron un resultado positivo, y esta dirección se cerró en 2006. Para entonces, el programa de I + D había gastado más de $ 1,45 millones, lo que lo convierte en uno de los vehículos no tripulados más costosos jamás implementados por el Pentágono.
Sin embargo, la Armada no abandonó la idea de introducir nuevos tipos de aviones en las composiciones de sus ya poderosos grupos de aviación naval y en mayo 2010 realizó una solicitud de información sobre el UAV de la plataforma UCAV, que más tarde se llamó UCLASS, para las principales corporaciones de defensa de los Estados Unidos. La idea que ocuparon los jefes de los estrategas navales de Estados Unidos fue la siguiente. Hizo falta un complejo de ataque de reconocimiento discreto capaz, a fines de 2018, para operar en conjunto con aviones de cabina tripulados como parte del grupo de aviones de portaaviones. El RUAC propuesto, que consta de cuatro a seis vehículos aéreos no tripulados (UAV), debe actuar de forma autónoma con los portaaviones CVN-68 Nimitz y Gerald Ford CVN-78, debe estar en el aire sin reabastecer de combustible las horas 11 - 14, y también ser capaz de reponer el combustible del reabastecimiento de combustible de aeronaves. en los sistemas "cono de manguera" o "depósito de combustible de varilla de llenado".
Una característica distintiva importante del sistema UCLASS fue su misión de operar en el espacio aéreo bien protegido por los sistemas de defensa aérea, lo que significa que el UAV debería tener un bajo nivel de visibilidad de radar por analogía con la versión de plataforma del caza F-35C de quinta generación.
Los contratos para el desarrollo de este concepto de la Armada se entregaron a las compañías General Atomix Aeronautical Systems, Lockheed Martin y Northrop Grumman.
Pero ahora estamos más interesados en el concepto X-47B propuesto por Northrop Grumman, ya que sus dos manifestantes están construidos, vuelan y se están preparando para los vuelos de prueba en el portaaviones nuclear Harry Truman. La compañía recibió un contrato de la Armada para producir un modelo de un sistema aéreo no tripulado de demostración de sistema de aviones de combate no tripulados (UCAS-D) en agosto 2007. Como parte del programa de desarrollo y las pruebas de vuelo de dos demostradores X-47B con dimensiones de caza, se obtendrá la experiencia necesaria, que se planea utilizar en el programa competitivo posterior para crear para la Armada de los Estados Unidos un UCLASS RUAK no tripulado basado en la cubierta.
La versión X-47B es una versión mejorada del dispositivo X-47A UCAV-N, está hecha con un diseño aerodinámico sin cola, tiene una longitud de medidores 11 y una envergadura de 18,9. El aumento de la envergadura del ala en combinación con el turborreactor Pratt & Whitney F100-220U permite que el modelo permanezca en el aire durante nueve horas y proporciona una distancia de kilómetros 2960. Las consolas del ala delta del dispositivo se hacen plegadas, lo que reduce su tamaño y proporciona una base en el portaaviones.
Opción marina
El primer vuelo exitoso del X-47B se realizó el 2011 del año de febrero en el Dryden Flight Test Center en la base de Edwards (California) de la Fuerza Aérea de los EE. UU. Y luego, en junio, el 2012 se envió a la Estación Aérea Naval del Río Patuxent (Maryland) para Llevando a cabo la siguiente etapa de pruebas.
Un mes después, en julio 29, hubo un segundo vuelo allí. Según lo informado por el comando de los sistemas de aviación de las fuerzas navales, el demostrador de UAV despegó del aeródromo y estuvo en el aire 35 minutos, la altitud de los metros 2300 y la velocidad 330 kilómetros por hora.
Este vuelo sobre la Bahía de Chesapeake abrió el programa de prueba de vuelo X-47B, en el cual se debe confirmar la compatibilidad del modelo con los procedimientos de vuelo estándar en la cubierta y su equipo de aterrizaje. El espacio aéreo aquí permite a los desarrolladores de UAV realizar vuelos de prueba sin ninguna restricción hasta la transferencia del programa de vuelo al portaaviones en el año 2013.
Uno de los complejos de prueba en la estación de aviación simula las condiciones del portaaviones y permite a los desarrolladores verificar que el UAV está listo para las pruebas en el mar, en particular, para probar la posibilidad de un despegue con la ayuda de una catapulta y un acercamiento y aterrizaje con un aerodinámico hasta que se realicen las pruebas reales en la cubierta.
A fines de noviembre de este año, el primer lanzamiento del X-47B se llevó a cabo en el río Patuxent utilizando una catapulta de vapor en tierra costera, después de lo cual el dispositivo realizó un vuelo de prueba sobre la bahía de Chesapeake. La misión de vuelo permitió la ejecución de varias maniobras que simulan un programa de vuelo UAV cuando aterrizan en la cubierta de un portaaviones en la trayectoria de planeo deseada. Según Darel Martis, director de pruebas de vuelo del demostrador UCAS-D en Northrop Grumman, este lanzamiento es un paso muy importante en el programa de prueba, ya que la capacidad de controlar con precisión el dispositivo mediante una CDU inalámbrica (Unidad de control remoto), que jugará un papel importante en las operaciones futuras con X-47B en el barco. Entre estas operaciones están el rodaje del UAV, su movimiento a la catapulta de la cubierta y su acoplamiento, el desacoplamiento del aerofinador después del aterrizaje y la salida rápida de la plataforma de aterrizaje.
El equipo combinado de especialistas navales y la compañía de desarrollo Northrop Grumman continuarán los vuelos terrestres durante las próximas semanas antes del lanzamiento del segundo demostrador de UAV X-47B a bordo del portaaviones atómico CVN-75 Harry Harman. Estos trabajos se llevarán a cabo hasta el final del año, y en 2013, se planea iniciar vuelos desde la cubierta, continuándolos en 2014 año con pruebas de vuelo para el reabastecimiento de combustible autónomo de X-47B en el aire utilizando el programa AAR (Reaprovisionamiento de aire autónomo) utilizando una barra y un cono de repostaje.
En el curso de este programa, las tecnologías necesarias para la posterior creación del RUAK no tripulado de bajo perfil sin tripulación se probarán de manera consistente. Para 2020, la Armada planea comenzar a operar en el portaaviones del primer escuadrón de vehículos aéreos no tripulados de reconocimiento, que tiene las dimensiones de un caza de cubierta.
En la etapa inicial de las pruebas de cubierta en diciembre del demostrador X-47B, se planea verificar la compatibilidad del dispositivo con las operaciones estándar realizadas con el grupo de aeronaves basado en el portaaviones. Para ello, el barco está equipado con el equipo y el software adecuados. De acuerdo con el programa de comando de los sistemas de aviación de la Armada de los EE. UU., Los vehículos aéreos no tripulados realizarán varios rodajes en la cubierta de un portaaviones, así como otras operaciones.
Las pruebas de demostración de vuelo X-47B programadas para el año 2013 incluyen que el demostrador UCAS-D despegue y aterrice en la cubierta de un portaaviones, ubique el vehículo en el espacio aéreo controlado por el servicio de control de tráfico aéreo de la aeronave y realice otras operaciones regulares con este modelo.
Como parte del programa UCAS-D, 2013 tiene previsto probar la posibilidad de que un demostrador X-47B autónomo y discreto funcione de manera segura desde un portaaviones, incluido el despegue y el aterrizaje, después de lo cual su repostaje autónomo en el aire se llevará a cabo en el 2014-m.
Anticipándose a las pruebas en el mar, los desarrolladores probaron el control del dispositivo en la cubierta del barco utilizando un dispositivo de visualización portátil inalámbrico CDU (Control Display Unit), que permitirá a los operadores maniobrar el UAV en un portaaviones a través del control remoto. . El trabajo se llevó a cabo a principios de noviembre en la Estación Aérea Naval de EE. UU. Patuxent River y demostró la capacidad de maniobrar con seguridad el dispositivo en una cubierta llena de otras aeronaves, con control inalámbrico. El programa de prueba preveía controlar el empuje del motor UAV, realizar el rodaje en tierra, salir del dispositivo a la catapulta y conectarse con él, así como mover zumbido en la zona de aterrizaje simulado después de que se complete el aterrizaje.
El operador de cubierta X-47B trabajará en conjunto con el jefe de la cabina de vuelo de un portaaviones cuando realice operaciones para cambiar su posición en la nave utilizando un dispositivo CDU. El líder de vuelo utilizará los comandos manuales tradicionales para mostrar cómo la unidad puede moverse a lo largo de la cubierta. El operador con el dispositivo de control planea estar detrás del director de vuelo y usar la CDU para duplicar los comandos manuales y transmitirlos al UAV en forma digital a través de un enlace inalámbrico.
Otras tareas que X-47B debe realizar en el aire también se están desarrollando con éxito. En particular, se realizaron una serie de pruebas de vuelo para demostrar la tecnología que puede ayudar a aumentar el alcance y la duración del vuelo de los posibles vehículos aéreos no tripulados basados en la cubierta de aviones no tripulados al realizar operaciones de reconocimiento o ataque.
Estas pruebas demostraron las capacidades del hardware y software creados que pueden ayudar a X-47B a realizar reabastecimiento de combustible autónomo en el aire de AAR (reabastecimiento de combustible aéreo autónomo) en el año 2014. Como informó la compañía Northrop Grumman, durante las pruebas de vuelo del programa AAR, las funciones del X-47B drone BLAH fueron realizadas por su simulador, el avión “Lidzhet” de la compañía Kalspan. El avión K707 de Omega Air Reefwell Company se usó como un petrolero. Demostró la posibilidad de reabastecerse de combustible con dos métodos utilizados por la Marina de los EE. UU. Y la Fuerza Aérea. En el primer caso, se trataba de un sistema de "cono de manguera", y en el segundo, la recepción de combustible de otros dispositivos utilizando una barra de combustible. En pruebas, la transferencia de combustible en el aire entre la aeronave no se llevó a cabo.
En el "Lirjet" se instalaron equivalentes funcionales del sistema de navegación, el procesador del sistema de control de vuelo y el sistema de revisión del hemisferio delantero, que el X-47B utilizará cuando realice operaciones de repostaje en el aire. El avión no tenía un cuello de llenado o un receptor. El K707 era casi idéntico al avión KC-135 de la Fuerza Aérea de los EE. UU. Y está equipado con un cono de llenado.
En cada sesión de entrenamiento de reabastecimiento de combustible en el aire, el simulador del UAV "Lidzhet" se retiró para eliminar aproximadamente 1,6 kilómetros del petrolero. El piloto luego transfirió el control de la aeronave al procesador de a bordo del X-47B, proporcionando control de vuelo autónomo y controlando el simulador de la aeronave durante la prueba.
Durante una operación regular de "reabastecimiento de combustible", el operador a bordo del K707 o el líder de vuelo en tierra emitieron órdenes al "Lirjet" al pasar cada posición principal al repostar en el aire: controlar la posición del contacto detrás del petrolero al reabastecerse de combustible, posición después del reabastecimiento de combustible.
A bordo del X-47B, se utilizará un sistema de navegación visual por satélite híbrido junto con un sistema de control de vuelo autónomo, que permitirá determinar y mantener con precisión la distancia entre el tanque y la unidad que se va a repostar.
Northrop Grumman y la Marina planean realizar pruebas adicionales en el programa AAR utilizando el mismo avión, cuando el hardware y el software X-47B probados en las pruebas de vuelo estén listos.
Equivalente europeo
La implementación del programa para crear vehículos aéreos no tripulados para drones en los Estados Unidos está bajo el escrutinio de las principales compañías aeroespaciales europeas. Nadie en Europa quiere que Estados Unidos haga un largo camino para crear las últimas tecnologías que estarán en demanda en futuros conflictos militares. En la actualidad, la industria de defensa de Francia y Alemania está tratando de evitar la compra de los tambores estadounidenses MQ-9 "Ripper" (Reaper) de la compañía "General Atomics" (General Atomics). Estos dos países europeos están considerando la adquisición conjunta de gran parte de este modelo para un uso conjunto adicional. Sin embargo, los fondos disponibles destinados a la compra de vehículos aéreos no tripulados estadounidenses, con toda probabilidad, pueden retirarse del programa para financiar el desarrollo del avión no tripulado europeo, lo que lo pondrá en una posición difícil. Para demostrar a los gobiernos de sus países la disponibilidad de tecnologías similares en el campo de los vehículos no tripulados militares, así como para ejercer cierta presión sobre el liderazgo político-militar de Francia y Alemania, el 1 2012 del año en el sitio francés de Istries se realizó el tan esperado primer vuelo del manifestante del dron europeo UAV Neuron. .
El contratista principal de este programa, la empresa francesa de fabricación de aviones Dassault Aviation (Dassault Aviation), así como un grupo de empresas subcontratistas de cinco países europeos, esperan que el primer vuelo de Neuron sirva como un tipo de catalizador y obligue a los gobiernos de los países que participan en el proyecto a combinar esfuerzos y coordinar Sus acciones en el desarrollo de su propio vehículo no tripulado. El primer paso en esta dirección podría ser la decisión de construir un nuevo modelo, el Neuron-2, que tendría una configuración más avanzada y permitiría pruebas intensivas de tropas de las capacidades de un posible UAV de ataque.
Además del programa Neuron, Dassault Aviation, junto con los British BAE Systems (BAE Systems), explorará la posibilidad de crear un UAV de combate anglo-francés prometedor, así como un drone de longitud media del tipo MALE (Long-Altitude Long-Endurance ).
El UAV Neuron realizó el primer vuelo de 25 minutos, en el que se evaluaron los siguientes pasos básicos: rodaje automático del vehículo a lo largo de la pista, manteniéndolo en el medio de la pista, despegando, aterrizando y aterrizando, corriendo a lo largo de un carril a alta velocidad, Rendimiento en el aire de varias vueltas, escalar, bucear suavemente. Las pruebas se realizaron en el rango de posibles regímenes de vuelo, y la velocidad del dispositivo alcanzó 277 kilómetros por hora, y la altura - metros 610.
Ahora está previsto que el modelo se transfiera al Centro de Electrónica de Sistemas de Armas (Center de l'Electronique de l'Armement) de la Delegación General para Armamentos de Francia DGA para realizar estudios de cuatro meses de sus signos de separación en varios rangos del espectro electromagnético (radar, infrarrojo, ultravioleta, óptico, etc.) En una cámara anecoica especial. Una vez finalizado este trabajo, el UAV será devuelto a Istres, donde en abril 2013 comenzará el programa de sus pruebas de vuelo, que en medio de 2014 finalizarán con el lanzamiento de bombas guiadas desde el compartimiento interno de armas. Se planea que los bombardeos en un escenario de combate simulado se lleven a cabo en un objetivo terrestre detectado, identificado y capturado para acompañar a los sensores de drones a bordo de dispositivos ópticos electrónicos e infrarrojos. El dispositivo se está preparando para realizar pruebas no solo en Francia, sino también en Suecia e Italia, y cada vez que los sitios de prueba midan su nivel de visibilidad en diferentes rangos del espectro electromagnético cuando trabajan con sistemas nacionales de defensa aérea y otros sistemas de armas. En total, durante las pruebas de vuelo, el UAV Neuron realizará aproximadamente cien vuelos, cada uno de los cuales tendrá una duración de al menos una hora.
El programa de creación de tecnología de demostración de la tecnología de aviones no tripulados Neuron se anunció en 2003, y el contrato correspondiente por un valor aproximado de 400 millones de euros se emitió al final de 2005. Aproximadamente la mitad de esta cantidad vino a Francia (Dassault Aviation y Thales), mientras que los fondos restantes se distribuyeron entre otros participantes del programa: Grecia (HAI), Italia (Alenia Aermacchi), Suecia (SAAB), España (EADS-CASA), Suiza (RUAG).
El control sobre la implementación del programa está a cargo de la Dirección General de Armamentos de Francia DGA, el contratista principal es Dassault Aviation, que subcontrata directamente con sus socios industriales. La organización del trabajo no permite la duplicación, los trabajos contratados están diseñados para utilizar solo aquellos conocimientos que ya se encuentran en las reservas científicas y técnicas de los participantes del programa, y no para desarrollos prometedores. Este enfoque, como señalan los expertos, es fundamentalmente nuevo para los programas conjuntos europeos y garantiza la disciplina financiera y tecnológica durante la implementación del proyecto.
A diferencia de la mayoría de los otros vehículos aéreos no tripulados que ya están en funcionamiento, el Neuron no es un vehículo a control remoto, pero realiza una tarea preprogramada sin ingresar ningún comando adicional desde el suelo. El rol del operador en tierra es observar el progreso del vuelo y confirmar cada etapa exitosa, aunque si es necesario puede ingresar al circuito de comando y tomar el control.
Los participantes del proyecto consideran el vuelo UAV totalmente autónomo como el más óptimo en condiciones de combate, ya que esto permitirá que el dron de combate realice la tarea incluso si la línea de datos de comando está inhabilitada por una interferencia intensa. En el caso del tipo de aeronave a control remoto RPV (Vehículo pilotado a distancia), están programados para una inmersión vertical y destrucción al golpear el suelo en caso de fallo del canal de control de vuelo.
La masa de la "Neurona": seco - cinco, la carga útil - dos (combustible y armas) y el máximo despegue - siete toneladas. El dispositivo puede estar en el aire durante aproximadamente tres horas, volando a una velocidad correspondiente al número M = 0,8, en altitudes de hasta 3000 metros.
Con respecto al nivel de visibilidad del UAV, los representantes oficiales de Dassault Aviation lo compararon con el auge, y señalaron que la magnitud de la superficie de dispersión efectiva se explorará desde diferentes ángulos durante los próximos meses de prueba de 18.
Leer más: http://vpk-news.ru/articles/13673
información