Piloto Walker "Ortonog"
Los vehículos autopropulsados con propulsión a pie han atraído a científicos, ingenieros y usuarios potenciales. Los estudios disponibles muestran claramente las ventajas de los caminantes sobre los vehículos con ruedas o sobre orugas en varios tipos de superficie. Al mismo tiempo, hasta ahora ninguno de los proyectos de tecnología para caminar ha abandonado la etapa de prueba de los prototipos. El precio del alto rendimiento de la carretera es la mayor complejidad del diseño y los sistemas de control necesarios capaces de controlar el estado de la superficie, el funcionamiento de los agregados, etc. Hace unos días, hubo una demostración de la siguiente muestra del andador, diseñada para resolver algunos de los problemas existentes.

Durante la V Conferencia Internacional Científica y Práctica "Progreso de vehículos y sistemas-2013", celebrada recientemente en la Universidad Técnica del Estado de Volgogrado (VolSTU), a los participantes del evento de los países de 37 se les mostró el aparato experimental "Ortonog". La máquina para caminar, desarrollada por el personal del Departamento de Mecánica Teórica de la Universidad Técnica de Volgogrado y el TsKB Titan, está diseñada para probar los sistemas de control y demostrar las capacidades de un caminante con una unidad de propulsión ortogonal original. Vale la pena señalar que el Ortonog de Volgogrado fue por primera vez hace un año, pero el resultado de esas pruebas se vio afectado por la imperfección del sistema de control. Desde entonces, los desarrolladores del proyecto han mejorado los algoritmos mediante los cuales operan las unidades de la máquina, lo que ha llevado a un notable aumento en sus características. Durante la demostración en la conferencia de Ortonog, caminó libremente por el sitio de demostración, recibiendo comandos del panel de control.
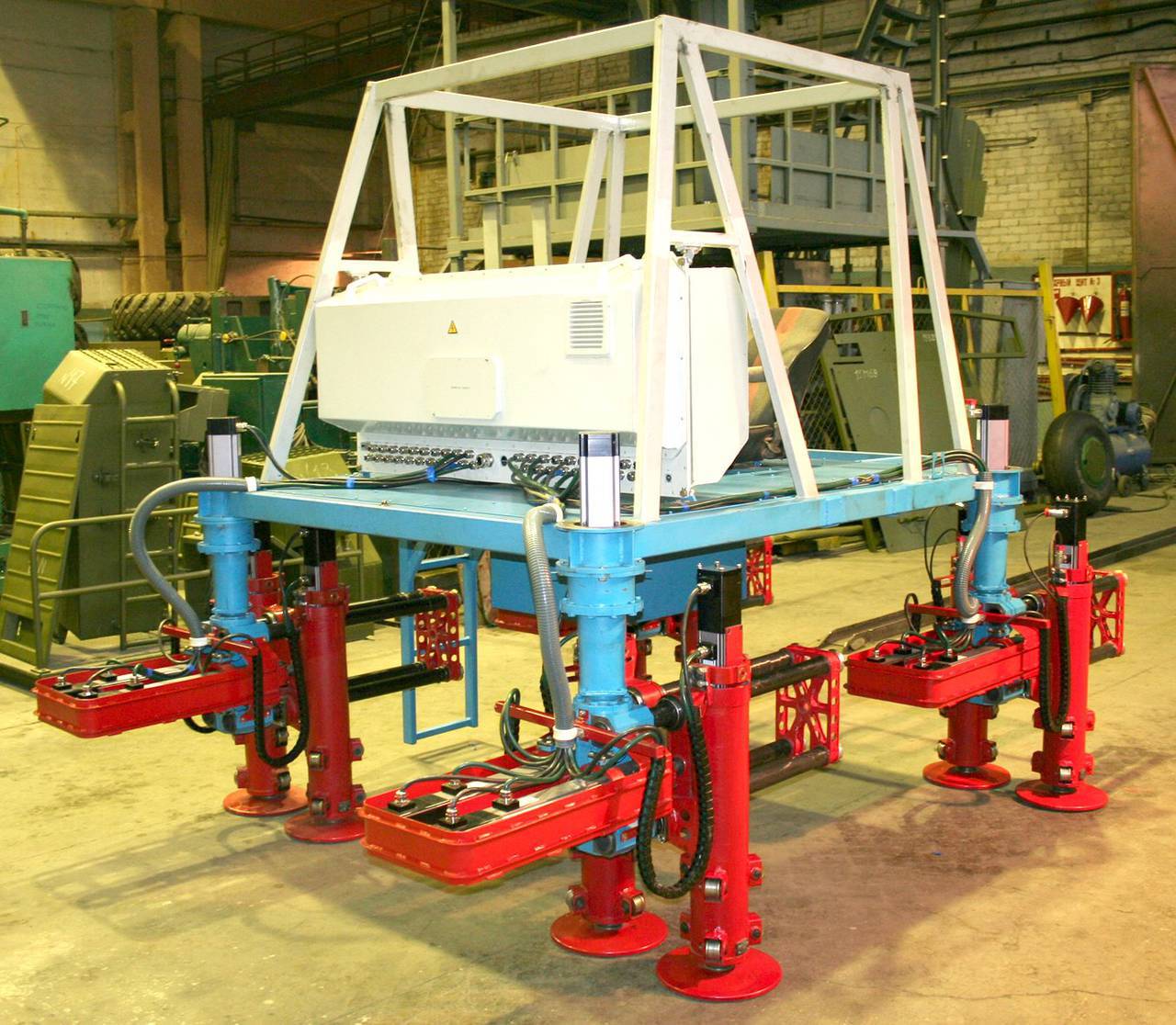
El diseño de la máquina experimental "Ortonog" es relativamente simple, pero al mismo tiempo efectivo. En el bastidor del aparato se instaló la cabina con el puesto de trabajo del operador-conductor y los sistemas de control. Detrás de él está montado un generador de gasolina de pequeño tamaño, que suministra al caminante la energía eléctrica necesaria para su funcionamiento. Cuatro bloques de empujadores ortogonales se fijan en la parte inferior del marco. El prototipo del automóvil Ortonog está pintado con los colores de la bandera rusa, lo que, entre otras cosas, facilita la identificación visual de varias unidades. Por lo tanto, los elementos de la cabina están pintados de blanco, el marco es azul y el chasis es rojo. La máquina experimental que pesa alrededor de 1200 kg tiene una longitud total del orden de los medidores 3,3, una anchura de no más de los medidores 2,2 y una altura de los medidores 2,75.
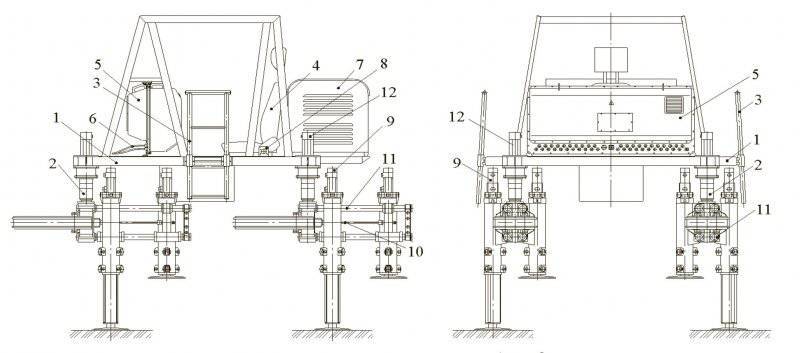
Cada uno de los cuatro bloques del chasis se divide convencionalmente en tres elementos: los mecanismos de movimiento vertical, los mecanismos de movimiento horizontal y los mecanismos de rotación. Los primeros tienen cilindros eléctricos en su composición y son responsables de subir y bajar los soportes circulares colocados en varillas retráctiles. Ortonog tiene ocho soportes de este tipo, dos para cada bloque del chasis. Los mecanismos de movimientos horizontales, consistentes en guías y actuadores, están diseñados para mover el cilindro y la varilla con el soporte. Cada bloque del chasis tiene dos juegos de guías y unidades, uno para cada cilindro con soporte. Finalmente, los engranajes giratorios despliegan todo el bloque del chasis alrededor de un eje vertical. Todo el tren de rodaje de la máquina experimental se basa en accionamientos eléctricos.
El movimiento del andador Ortonog sobre una superficie plana es el siguiente. La máquina levanta cuatro de los ocho soportes (uno de cada bloque en el chasis) y los desplaza hacia adelante utilizando mecanismos de movimiento horizontal. Además, el soporte cae a la superficie y el ciclo se repite, pero esta vez los otros cuatro soportes se elevan y avanzan. Durante el movimiento, el Ortonog utiliza unidades de desplazamiento alternativamente verticales, y los mecanismos horizontales funcionan casi todo el tiempo. Si es necesario, se activan los mecanismos de rotación. Su operación síncrona o separada asegura la rotación al ángulo requerido. Como puede verse en el diseño, el caminante experimental puede tomar turnos con un radio mínimo.
Todos los mecanismos de marcha están equipados con sensores que recopilan información sobre su trabajo. La información se transmite a la consola del conductor del operador y tiene la capacidad de realizar ajustes en el funcionamiento de la máquina. Uno de los mayores problemas en el proyecto Ortonog está relacionado con el trabajo del conductor. Como muestra la práctica, una persona puede operar efectivamente una máquina solo cuando se conduce sobre una superficie plana. Si existe la necesidad de desplazarse por terreno accidentado, etc. En rutas complejas, el operador no puede monitorear independientemente el trabajo de todos los mecanismos y seleccionar los algoritmos de operación necesarios en un momento u otro. En este sentido, simultáneamente con la parte técnica de la máquina, se desarrolló un complejo de control automatizado.
Inicialmente, se utilizó el siguiente método de control para probar la máquina experimental. El operador del complejo controlaba el funcionamiento autónomo del dispositivo de acuerdo con la información transmitida por el sistema de video. Si es necesario, en primer lugar, al superar los obstáculos, interfirió e hizo los ajustes necesarios en el trabajo del caminante. La gran mayoría de las acciones de control de la máquina se llevaron a cabo mediante la automatización sin intervención humana. En este caso, la automatización del aparato experimental recibió información sobre el funcionamiento de los sistemas y la posición de la máquina en el espacio solo de los sensores. No se tomaron medidas para utilizar la señal de video. El resultado de este enfoque de la recopilación de información necesaria para controlar la máquina fue una situación en la que la electrónica no puede sortear los obstáculos y esto requiere la intervención del operador.

Tales pruebas ayudaron a reunir la información necesaria para configurar un control de andador adaptativo. El equipo especial grabó todas las acciones del operador, la información de los sensores y también grabó la señal de las cámaras de video externas e integradas. En el futuro, se compararon todos los datos registrados y se seleccionaron los fragmentos de datos que correspondían a acciones específicas de los mecanismos. Esta información fue utilizada para la automatización de "aprendizaje". Los resultados de los sistemas de control de prueba y ajuste fino a primera vista no parecen demasiado altos. Sin embargo, ya a finales del año pasado, el aparato Ortonog pudo, independientemente y sin la ayuda del operador, moverse a lo largo de superficies rectas e inclinadas y mantener la posición requerida del cuerpo independientemente del ángulo de la superficie. Además, la unidad "aprendió" a detenerse de forma independiente, tropezó con un obstáculo y determinó el tamaño de la perturbación utilizando los mecanismos de tren de rodaje disponibles.
A pesar de que el aparato Ortonog aún no puede convertirse en la base de las máquinas para caminar adecuadas para el uso práctico, sus perspectivas ya son visibles. Como se desprende de la información disponible sobre el progreso del trabajo en este proyecto, el personal de VolSTU y TsKB "Titan" logró desarrollar un propulsor eficiente para caminar y crear algoritmos de control con buenas perspectivas. Según los datos oficiales, el automóvil Ortonog puede acelerar a velocidades superiores a 1,6 kilómetros por hora. La longitud y la altura del paso del soporte en 45 cm permiten que el dispositivo supere los obstáculos de hasta 40-45 cm en altura, al tiempo que mantiene la posición horizontal del marco. Para maniobras más complejas que involucran la inclinación del aparato, la altura máxima del obstáculo aumenta a 80, consulte. El ancho máximo del foso intersectado es el medidor 0,9. La hélice que camina es capaz de superar los aumentos a 40 °. Cuando se mueve a través de una pendiente, el Ortonog conserva la estabilidad en un ángulo de inclinación de la superficie a 60 °. Los bloques de chasis giratorios permiten que la unidad cambie la dirección del movimiento en cualquier ángulo con respecto a su eje longitudinal. Si es necesario, es posible moverse hacia los lados y girar con un radio de poco más de un metro.
Es demasiado pronto para hablar sobre las perspectivas del proyecto Ortonog. Este proyecto y el dispositivo construido de acuerdo con él son de naturaleza puramente experimental, lo que determina completamente los planes futuros de las organizaciones de desarrollo. En un futuro próximo, el departamento de "Mecánica teórica" de la Universidad Técnica de Volgogrado y la Oficina Central de Diseño "Titán" continuarán desarrollando los sistemas de propulsión y control a pie para ello. Solo después de la creación de algoritmos completos que puedan garantizar el trabajo del caminante en diversas superficies y en diferentes entornos, es posible comenzar a trabajar en la siguiente muestra experimental. El siguiente proyecto se puede utilizar para mejorar los desarrollos existentes y su adaptación a la aplicación práctica. Es poco probable que aparezca un nuevo proyecto en un futuro próximo: puede llevar varios años completar el trabajo en el aparato Ortonog.

En los materiales de los sitios:
http://cdbtitan.ru/
http://dtm.vstu.ru/
http://vpk.name/

Durante la V Conferencia Internacional Científica y Práctica "Progreso de vehículos y sistemas-2013", celebrada recientemente en la Universidad Técnica del Estado de Volgogrado (VolSTU), a los participantes del evento de los países de 37 se les mostró el aparato experimental "Ortonog". La máquina para caminar, desarrollada por el personal del Departamento de Mecánica Teórica de la Universidad Técnica de Volgogrado y el TsKB Titan, está diseñada para probar los sistemas de control y demostrar las capacidades de un caminante con una unidad de propulsión ortogonal original. Vale la pena señalar que el Ortonog de Volgogrado fue por primera vez hace un año, pero el resultado de esas pruebas se vio afectado por la imperfección del sistema de control. Desde entonces, los desarrolladores del proyecto han mejorado los algoritmos mediante los cuales operan las unidades de la máquina, lo que ha llevado a un notable aumento en sus características. Durante la demostración en la conferencia de Ortonog, caminó libremente por el sitio de demostración, recibiendo comandos del panel de control.
El diseño de la máquina experimental "Ortonog" es relativamente simple, pero al mismo tiempo efectivo. En el bastidor del aparato se instaló la cabina con el puesto de trabajo del operador-conductor y los sistemas de control. Detrás de él está montado un generador de gasolina de pequeño tamaño, que suministra al caminante la energía eléctrica necesaria para su funcionamiento. Cuatro bloques de empujadores ortogonales se fijan en la parte inferior del marco. El prototipo del automóvil Ortonog está pintado con los colores de la bandera rusa, lo que, entre otras cosas, facilita la identificación visual de varias unidades. Por lo tanto, los elementos de la cabina están pintados de blanco, el marco es azul y el chasis es rojo. La máquina experimental que pesa alrededor de 1200 kg tiene una longitud total del orden de los medidores 3,3, una anchura de no más de los medidores 2,2 y una altura de los medidores 2,75.
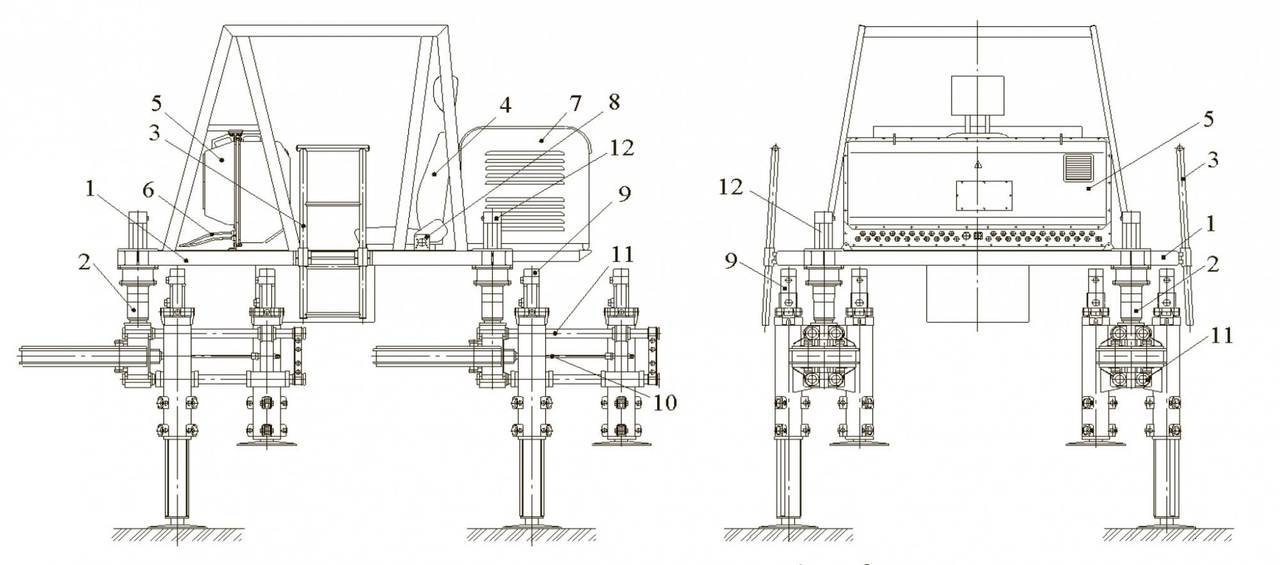
Esquema estructural de la marcha. el robot "Orthonog": 1 - cuadro; 2 - motores ambulantes; 3 - escaleras; 4 - asiento del operador; 5 - búnker de equipos eléctricos; 6 - red de cable; 7 - fuente de alimentación a bordo; 8 - panel; 9 - mecanismo de movimientos verticales; 10 - mecanismo de movimientos horizontales; 11 - guía; 12 - mecanismo de giro
Cada uno de los cuatro bloques del chasis se divide convencionalmente en tres elementos: los mecanismos de movimiento vertical, los mecanismos de movimiento horizontal y los mecanismos de rotación. Los primeros tienen cilindros eléctricos en su composición y son responsables de subir y bajar los soportes circulares colocados en varillas retráctiles. Ortonog tiene ocho soportes de este tipo, dos para cada bloque del chasis. Los mecanismos de movimientos horizontales, consistentes en guías y actuadores, están diseñados para mover el cilindro y la varilla con el soporte. Cada bloque del chasis tiene dos juegos de guías y unidades, uno para cada cilindro con soporte. Finalmente, los engranajes giratorios despliegan todo el bloque del chasis alrededor de un eje vertical. Todo el tren de rodaje de la máquina experimental se basa en accionamientos eléctricos.
El movimiento del andador Ortonog sobre una superficie plana es el siguiente. La máquina levanta cuatro de los ocho soportes (uno de cada bloque en el chasis) y los desplaza hacia adelante utilizando mecanismos de movimiento horizontal. Además, el soporte cae a la superficie y el ciclo se repite, pero esta vez los otros cuatro soportes se elevan y avanzan. Durante el movimiento, el Ortonog utiliza unidades de desplazamiento alternativamente verticales, y los mecanismos horizontales funcionan casi todo el tiempo. Si es necesario, se activan los mecanismos de rotación. Su operación síncrona o separada asegura la rotación al ángulo requerido. Como puede verse en el diseño, el caminante experimental puede tomar turnos con un radio mínimo.
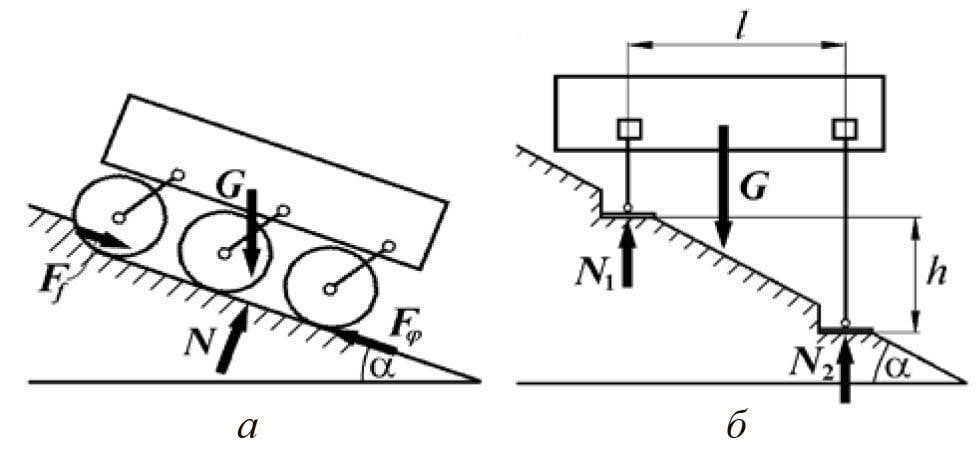
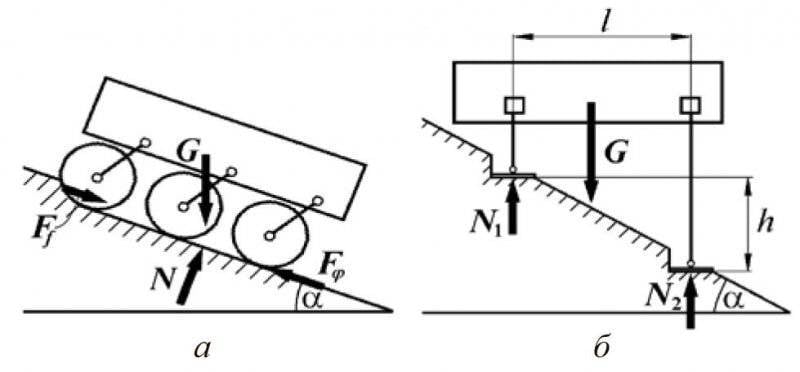
Movimiento a lo largo de la pendiente de los automóviles con ruedas (a) y a pie (b)
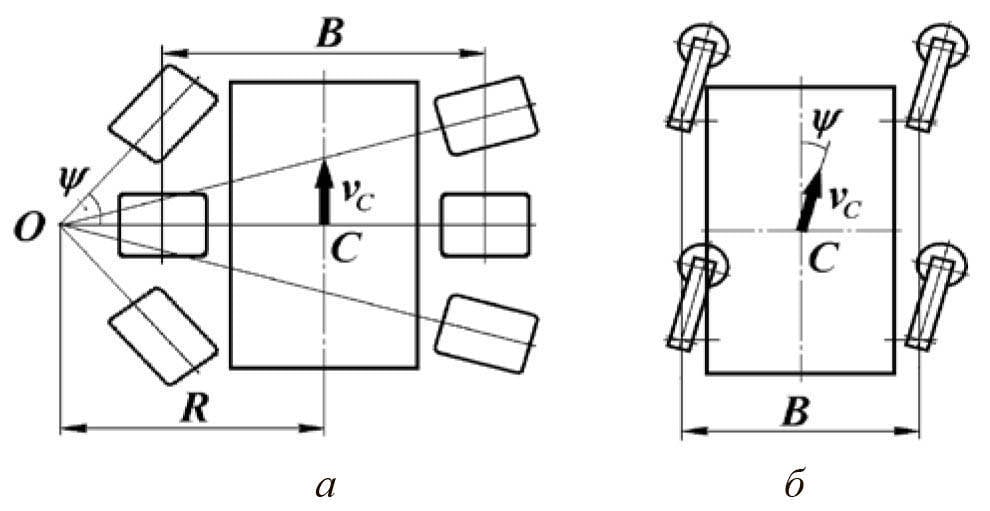
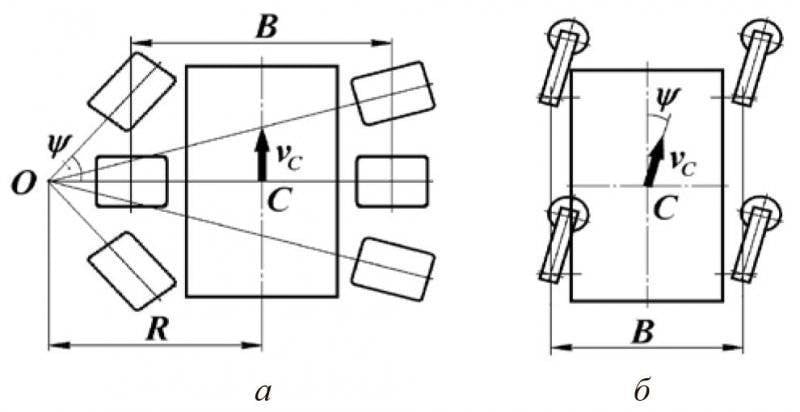
La figura 5. El esquema de rotación de los automóviles con ruedas (a) y de marcha (b).
Todos los mecanismos de marcha están equipados con sensores que recopilan información sobre su trabajo. La información se transmite a la consola del conductor del operador y tiene la capacidad de realizar ajustes en el funcionamiento de la máquina. Uno de los mayores problemas en el proyecto Ortonog está relacionado con el trabajo del conductor. Como muestra la práctica, una persona puede operar efectivamente una máquina solo cuando se conduce sobre una superficie plana. Si existe la necesidad de desplazarse por terreno accidentado, etc. En rutas complejas, el operador no puede monitorear independientemente el trabajo de todos los mecanismos y seleccionar los algoritmos de operación necesarios en un momento u otro. En este sentido, simultáneamente con la parte técnica de la máquina, se desarrolló un complejo de control automatizado.
Inicialmente, se utilizó el siguiente método de control para probar la máquina experimental. El operador del complejo controlaba el funcionamiento autónomo del dispositivo de acuerdo con la información transmitida por el sistema de video. Si es necesario, en primer lugar, al superar los obstáculos, interfirió e hizo los ajustes necesarios en el trabajo del caminante. La gran mayoría de las acciones de control de la máquina se llevaron a cabo mediante la automatización sin intervención humana. En este caso, la automatización del aparato experimental recibió información sobre el funcionamiento de los sistemas y la posición de la máquina en el espacio solo de los sensores. No se tomaron medidas para utilizar la señal de video. El resultado de este enfoque de la recopilación de información necesaria para controlar la máquina fue una situación en la que la electrónica no puede sortear los obstáculos y esto requiere la intervención del operador.

Tales pruebas ayudaron a reunir la información necesaria para configurar un control de andador adaptativo. El equipo especial grabó todas las acciones del operador, la información de los sensores y también grabó la señal de las cámaras de video externas e integradas. En el futuro, se compararon todos los datos registrados y se seleccionaron los fragmentos de datos que correspondían a acciones específicas de los mecanismos. Esta información fue utilizada para la automatización de "aprendizaje". Los resultados de los sistemas de control de prueba y ajuste fino a primera vista no parecen demasiado altos. Sin embargo, ya a finales del año pasado, el aparato Ortonog pudo, independientemente y sin la ayuda del operador, moverse a lo largo de superficies rectas e inclinadas y mantener la posición requerida del cuerpo independientemente del ángulo de la superficie. Además, la unidad "aprendió" a detenerse de forma independiente, tropezó con un obstáculo y determinó el tamaño de la perturbación utilizando los mecanismos de tren de rodaje disponibles.
A pesar de que el aparato Ortonog aún no puede convertirse en la base de las máquinas para caminar adecuadas para el uso práctico, sus perspectivas ya son visibles. Como se desprende de la información disponible sobre el progreso del trabajo en este proyecto, el personal de VolSTU y TsKB "Titan" logró desarrollar un propulsor eficiente para caminar y crear algoritmos de control con buenas perspectivas. Según los datos oficiales, el automóvil Ortonog puede acelerar a velocidades superiores a 1,6 kilómetros por hora. La longitud y la altura del paso del soporte en 45 cm permiten que el dispositivo supere los obstáculos de hasta 40-45 cm en altura, al tiempo que mantiene la posición horizontal del marco. Para maniobras más complejas que involucran la inclinación del aparato, la altura máxima del obstáculo aumenta a 80, consulte. El ancho máximo del foso intersectado es el medidor 0,9. La hélice que camina es capaz de superar los aumentos a 40 °. Cuando se mueve a través de una pendiente, el Ortonog conserva la estabilidad en un ángulo de inclinación de la superficie a 60 °. Los bloques de chasis giratorios permiten que la unidad cambie la dirección del movimiento en cualquier ángulo con respecto a su eje longitudinal. Si es necesario, es posible moverse hacia los lados y girar con un radio de poco más de un metro.
Es demasiado pronto para hablar sobre las perspectivas del proyecto Ortonog. Este proyecto y el dispositivo construido de acuerdo con él son de naturaleza puramente experimental, lo que determina completamente los planes futuros de las organizaciones de desarrollo. En un futuro próximo, el departamento de "Mecánica teórica" de la Universidad Técnica de Volgogrado y la Oficina Central de Diseño "Titán" continuarán desarrollando los sistemas de propulsión y control a pie para ello. Solo después de la creación de algoritmos completos que puedan garantizar el trabajo del caminante en diversas superficies y en diferentes entornos, es posible comenzar a trabajar en la siguiente muestra experimental. El siguiente proyecto se puede utilizar para mejorar los desarrollos existentes y su adaptación a la aplicación práctica. Es poco probable que aparezca un nuevo proyecto en un futuro próximo: puede llevar varios años completar el trabajo en el aparato Ortonog.
En los materiales de los sitios:
http://cdbtitan.ru/
http://dtm.vstu.ru/
http://vpk.name/
información