Dificultades tecnológicas críticas en el desarrollo de ATGM Javelin. Parte de 2
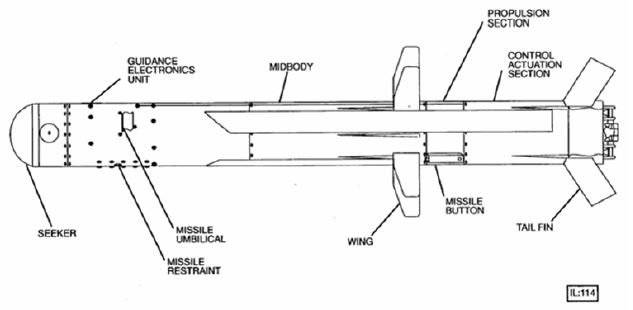
Cohete de jabalina

El operador de ATGM Javelin mira el comando y la unidad de lanzamiento.
Homing Head (GOS)
Al igual que Stinger, el cohete Javelin pertenece al sistema "shot-forget". Una vez lanzado, debe poder rastrear y destruir su objetivo sin la intervención adicional de un operador u otra fuente externa. La decisión sobre la necesidad de un sistema de "disparar y olvidar" fue tomada conjuntamente por el ejército y el Cuerpo de Marines y se implementó a través de un detector de infrarrojos y el más moderno sistema de rastreo a bordo.
Como se describió anteriormente, el operador utiliza el sistema IR PBC para detectar e identificar el objetivo. Luego cambia a un sistema de misiles infrarrojos independiente para establecer una marca en el objetivo y "arreglarlo". El operador establece los marcos alrededor de la imagen de destino, los "arregla", colocándolos de modo que el objetivo rellene el espacio entre los marcos tanto como sea posible. La tarea del GOS es esencialmente permanecer enfocado en la imagen del objetivo, continuar reconociéndola incluso cuando el objetivo está en movimiento, cuando la trayectoria de un cohete que vuela a una velocidad de más de 150 m / s cambia el punto de vista del GOS cuando los ángulos de ataque y cuando cambias el tamaño de la imagen del objetivo cuando el cohete se acerca. Todos los muchos detalles del GOS deberían funcionar correctamente, pero hay tres componentes que vale la pena mencionar: el detector, el sistema de enfriamiento y calibración y el sistema de estabilización.
El GOS está ubicado debajo de una tapa semiesférica hecha de sulfuro de zinc, que es transparente a la radiación infrarroja de onda larga utilizada en el detector. La radiación infrarroja penetra a través de la tapa y luego a través de una lente transparente enfocada hecha de germanio y sulfuro de zinc. La energía IR mediante espejos de aluminio pulido se refleja en el detector. El GOS del cohete Javelin está equipado con una matriz bidimensional en el plano focal del tamaño de 64 en el elemento 64. Los detectores están hechos de una aleación de telururo de cadmio y telururo de mercurio (llamado telururo de mercurio y cadmio, o HgCdTe). Cabe señalar que, a diferencia del detector de PBC IR, que es una matriz lineal de exploración, el detector GOS procesa las señales de los sensores y las transmite al sistema de rastreo de cohetes.
El desarrollo de una matriz bidimensional en el plano focal resultó ser muy difícil. Texas Instruments ha desarrollado arreglos de plano focal para PBC y GOS utilizando dispositivos foto-capacitivos en los cuales los fotones entrantes estimulan los electrones que inicialmente están en el detector en forma de una carga acumulada. Los electrones se descargan píxel por píxel a medida que las corrientes del circuito integrado de lectura pasan a la parte posterior del detector. A pesar del hecho de que tal enfoque se ha demostrado en la matriz de PBC, ha resultado muy difícil para el buscador de misiles crear una matriz bidimensional operativa en el plano focal. Texas Instruments no pudo obtener la calidad de HgCdTe requerida para un proceso foto-capacitivo aceptable, y la matriz bidimensional no tenía suficiente capacidad electrónica. Texas Instruments pudo hacer suficientes matrices bidimensionales para ganar la competencia, pero el proceso de su producción en masa no cumplió con los estándares de calidad y matrimonio. Solo desde 0,5% hasta 2% de las matrices producidas cumplieron con todos los requisitos. Los problemas de producción amenazaron con duplicar los costos de desarrollo y, en general, ponen en peligro la existencia misma del programa Javelin.
La urgencia de este problema se manifestó en 1991-92. La Oficina del Departamento de Defensa de los Estados Unidos, el Departamento de Fuerzas Terrestres y MICOM han creado un equipo especial para abordar este problema. Confiando en su propia experiencia técnica, concluyó que Texas Instruments simplemente no podía producir su desarrollo en las cantidades requeridas. El ejército reconoció que el éxito del programa dependía de la tecnología GOS y encontró una fuente alternativa para la producción de matrices. Se convirtieron en la corporación LORAL, que también encontró dificultades en la producción de matrices. Afortunadamente, la solución estaba a mano: el Centro de Investigación de Santa Bárbara de Hughes, el Centro de Investigación SBRC, en virtud de un acuerdo con DARPA, desarrolló otro diseño de matriz en el plano focal que podría hacerse de manera más eficiente. El diseño de Hughes utilizó un mecanismo fotoeléctrico en el que la señal de voltaje se generó directamente a partir de los efectos de los fotones y la acumulación de carga ocurrió en el circuito integrado de lectura en sí, y no en el material del detector. La administración del programa rechazó los servicios de Texas Instruments como el contratista principal, y también rechazó los servicios de LORAL como fuente alternativa y seleccionó a SBRC como proveedor matricial en el plano focal del GPS. Como resultado, el desarrollo de SBRC cumplió con las especificaciones requeridas, los volúmenes de suministros y la cantidad de chatarra. Texas Instruments continuó fabricando escáneres para CPB.
Para un funcionamiento óptimo del GOS, la matriz en el plano focal debe enfriarse y calibrarse. El detector de infrarrojos PBC se enfría utilizando una embarcación Dewar y un motor Stirling de circuito cerrado. No hay suficiente espacio en el cohete para usar este diseño. Antes de comenzar, la unidad de alimentación y refrigeración se instala en el exterior del contenedor de lanzamiento. Alimenta los sistemas eléctricos del cohete y suministra el gas de refrigeración a través del acelerador Joule-Thomson al GOS del cohete, mientras que el cohete en sí sigue en el contenedor de lanzamiento. Cuando se lanza un cohete, esta conexión externa se rompe y el gas de refrigeración se suministra desde el cilindro de gas con argón incrustado en el cohete. El gas está contenido en un pequeño cilindro a una presión de aproximadamente 420 kg por centímetro cuadrado. Esto es suficiente para enfriar el GOS durante todo el vuelo del cohete, aproximadamente 19-segundos. La fuente de alimentación externa y la unidad de refrigeración deben reemplazarse en caso de que se haya activado la unidad de giro y el cohete, por algún motivo, no se haya lanzado en cuatro minutos.
Este sistema de refrigeración también sirve al circuito integrado. Inicialmente, el circuito integrado se colocó fuera del área de enfriamiento y, por lo tanto, se usó una gran cantidad de cables para arreglos grandes. El fabricante logró colocar el microprocesador en el área refrigerada en la parte posterior del detector. Por lo tanto, solo los cables del microprocesador van al lado exterior del área enfriada. Por lo tanto, el número de cables se ha reducido significativamente: de 200 a 25.
GOS Javelina se calibra utilizando la llamada rueda "helicóptero". Este dispositivo es esencialmente un ventilador con cuchillas 6: cuchillas negras 5 con muy baja radiación IR y una cuchilla semirreflectante. Estas cuchillas giran frente a la óptica del GOS en un orden sincronizado, de modo que la matriz en el plano focal está constantemente provista de puntos de referencia (puntos de referencia) además del objetivo observado. Estas directrices sirven como una matriz para reducir el ruido constante introducido por diferentes grados de sensibilidad de los elementos individuales del detector.
Además del hecho de que el GOS debe enfriarse y calibrarse continuamente, la plataforma en la que se encuentra el GOS debe estabilizarse con respecto al movimiento del cuerpo del cohete y el GOS siempre debe permanecer en el objetivo. Aunque, a diferencia de Stinger, el casco de Javelina no gira en vuelo, el sistema de estabilización debe ser capaz de hacer frente a aceleraciones bruscas, movimientos hacia arriba / abajo y movimientos laterales y otros requisitos de la trayectoria del cohete, como una escalada pronunciada y una inmersión pronunciada. Esto se logra mediante un sistema de cardán de dos ejes, acelerómetros, giroscopios y motores para controlar los cambios en la posición de la plataforma. La información recibida de los giroscopios se alimenta a la electrónica del sistema de guía, que a su vez controla los motores montados en la plataforma GOS para que el GOS permanezca en el objetivo. Los cables que conectan el GPS con el resto del cohete fueron diseñados específicamente para no causar fricción, de modo que la plataforma del GPS pueda permanecer exactamente equilibrada. GOS Javelina desvía solo a los microradianos 10-20 en una G, lo que indica un excelente nivel de aislamiento.
Sistema de orientación y control.
El dispositivo de rastreo Javelina es un elemento esencial del sistema de guía y control. Las señales de cada uno de los más de los elementos 4000 del detector GOS se transmiten a un circuito integrado de lectura que crea una señal de video de un solo canal transmitida al dispositivo de rastreo para su procesamiento posterior. El dispositivo de rastreo compara cuadros individuales y calcula el ajuste necesario para mantener el cohete en el objetivo. Para realizar esta tarea, el dispositivo de rastreo debe poder determinar qué parte de la imagen general representa el objetivo en sí. Inicialmente, el objetivo es designado por el operador, quien coloca una marca de puntería en él. Después de eso, el dispositivo de rastreo utiliza algoritmos para comparar esta parte del cuadro (la comparación se basa en la imagen, los datos geométricos, los datos sobre el movimiento del objetivo) con la imagen proveniente del GPS. Al final de cada cuadro, el enlace se actualiza. El dispositivo de rastreo es capaz de sostener el cohete en el objetivo, incluso cuando el punto de vista del GOS cambia radicalmente durante el vuelo.
Para guía de misiles, el dispositivo de rastreo determina la posición del objetivo en el marco actual y lo compara con el punto de mira. Si la posición del objetivo no está en el centro, el dispositivo de rastreo calcula las correcciones y las transmite al sistema de guía de misiles, que, a su vez, transmite las correcciones correspondientes a las superficies de control (Javelin tiene cuatro aletas de cola móviles, así como seis alas fijas en la parte media del casco ). Esta parte del sistema se llama piloto automático. Utiliza un sistema de control de retroalimentación para guiar el misil, es decir, el sistema usa sensores para determinar la posición de las superficies de control. Si son rechazados, el controlador recibe una señal para su posterior ajuste.
Hay tres etapas principales de control de cohetes a lo largo de toda la trayectoria del vuelo: la fase inicial inmediatamente después del lanzamiento del motor de crucero, la parte principal del vuelo y la fase final en la que el dispositivo de rastreo selecciona un "lugar agradable" en el objetivo para su derrota. El piloto automático utiliza algoritmos de guía y datos del GOS para determinar cuándo se desplaza el cohete de una etapa de vuelo a otra. El perfil de vuelo puede variar significativamente según el modo de ataque elegido: recto o superior (el modo predeterminado). Cuando el modo de ataque está en la parte superior del cohete, después del lanzamiento, gana altitud bruscamente, realiza un vuelo de crucero a una altitud de aproximadamente 150 metros y luego se lanza a la parte superior del objetivo. En el modo de ataque directo, el cohete realiza un vuelo sostenido a una altitud de aproximadamente 45 metros. La trayectoria de vuelo exacta que toma en cuenta la distancia al objetivo se calcula por la unidad señaladora.
El desarrollo del dispositivo de rastreo Javelina fue producido tanto por la propia industria como por el arsenal de Redstone. Texas Instruments diseñó y fabricó prototipos, y Redstone actualizó y evaluó de forma independiente las capacidades del dispositivo de rastreo. Las pruebas estáticas mejoradas del GOS y el dispositivo de rastreo permitieron a los desarrolladores del dispositivo de rastreo probar, refinar y actualizar los algoritmos antes del inicio de las pruebas de vuelo. El programa de prueba estática también proporcionó datos invaluables para los desarrolladores de simulación de vuelo integrado. El programa de diseño de seguimiento aún no está completo.
Sistema de propulsión y ojiva.
Al igual que el Stinger, el Javelin utiliza un sistema de arranque suave. En otras palabras, el motor de arranque se lanza en el contenedor de lanzamiento y detiene su funcionamiento antes de que el cohete salga del contenedor, protegiendo así al operador de los efectos de los gases calientes. Un arranque suave proporciona un retroceso deficiente cuando se dispara desde el hombro y le permite lanzar sistemas antitanque desde edificios o plataformas cubiertas. Después de que el cohete sale del contenedor de lanzamiento y se retira a una distancia segura, el motor principal del cohete arranca y las alas y las aletas se abren. El cohete se mueve hacia el objetivo a velocidad subsónica. Debido a los requisitos de arranque suave, seguridad del operador y bajo peso, los logros más modernos de ese tiempo se utilizaron para desarrollar el exclusivo motor ATGM de Javelin. Los ingenieros del programa Javelin han logrado un progreso tecnológico significativo que, combinado con los logros de la industria, ha permitido a la compañía desarrollar un motor que cumple con todos los requisitos estrictos. El motor ATGM Javelin fue desarrollado por Atlantic Research Company (ARC), ahora Aerojet. ARC adaptó el diseño desarrollado por Alliant Technology. Al igual que el Stinger, el Javelin tiene motores incorporados de arranque y vuelo. Entre otros beneficios, este diseño integrado garantiza un bajo peso del sistema.
El motor funciona de la siguiente manera. El dispositivo de encendido del motor de arranque inicia una carga inflamable que, a su vez, impulsa el motor de arranque en sí. La carga de propelente sólido del motor de arranque se quema por dentro y por fuera, así como por sus dos extremos. Los productos de combustión salen por la boquilla del motor de arranque. Después de algún tiempo, una señal llega al dispositivo de encendido del motor principal, iniciando una carga de encendido, que activa la carga de combustible sólido del motor principal. Cuando se crea una presión de gas suficiente en su cámara de combustión, la membrana que separa los motores de arranque y sostenido se rompe, y los gases del motor de sustentación arrojan la cámara de combustión y las boquillas del motor de arranque. La seguridad del operador fue uno de los factores clave del programa Javelin. El misil está equipado con un sistema de alivio de presión para que, en caso de un arranque no autorizado del motor de arranque, esto no provoque una explosión. El motor de arranque está equipado con pasadores de cizallamiento desarrollados conjuntamente por el gobierno y la industria, colapsando en caso de sobrepresión del motor de arranque y permitiendo que el motor se caiga por la parte trasera del contenedor de lanzamiento.
ARC también ha desarrollado una carga de arranque inflamable. Su diseño en forma de anillo se ha convertido en una parte clave del sistema y sirve para integrar los motores de arranque y principales. La carga de encendido del motor de arranque tuvo que colocarse en la boquilla, pero simplemente se podía tirar por un chorro de gas desde allí, lo cual es inaceptable desde el punto de vista de la seguridad del operador. El uso de un encendedor de anillo solucionó este problema cuando los gases pasan a través del anillo. También garantiza el paso de gases calientes a los grados 360 de carga de combustible sólido y proporciona un encendido más confiable. Otro elemento importante en el diseño del motor es un disco de ruptura, que separa los motores de arranque y sostenido. Este componente, desarrollado por el ARC, tiene un límite de umbral más alto para la presión del motor de arranque y más bajo del motor principal. Esto permite que la membrana proteja el motor principal de los efectos del motor de arranque, pero, por otro lado, cuando crea una sobrepresión suficiente por el motor principal, rompe la membrana y dirige los gases del motor principal a través de la cámara del motor de arranque.
El motor Javelina se basa en tecnologías desarrolladas previamente para otros misiles. La carga de propelente sólido del motor de arranque es idéntica a la utilizada en otros misiles. La carga de combustible sólido del motor principal fue tomada de los misiles TOW y Hellfire y fue adaptada para Javelin por los esfuerzos conjuntos del gobierno y la industria de los EE. UU.
Al igual que con el desarrollo del motor, los esfuerzos conjuntos fueron cruciales para el desarrollo exitoso de la cabeza de combate Javelin ATGM. La colaboración entre el liderazgo del programa, el ejército, la Infantería de Marina y la industria ha sido particularmente exitosa en la optimización de las características de una ojiva tándem. La unidad de combate en tándem Javelina es una munición antitanque acumulativa. Esta munición usa una carga con forma para crear un chorro de metal superplástico deformado formado por un revestimiento de metal en forma de embudo. El resultado es un chorro de alta velocidad (10 km / s en la punta y 2-5 km / s en la cola), que es capaz de penetrar dinámicamente la armadura sólida.
El concepto básico de carga acumulativa se conoce desde 1880, pero los laboratorios del Ejército de los EE. UU. Han realizado un trabajo importante para mejorar esta tecnología y su aplicación en los sistemas de armas. El laboratorio de estudios balísticos contribuyó a la investigación básica, especialmente en el campo del modelado, y Picatinny Arsenal fue responsable de las pruebas de rendimiento de diseño y demostración. Physics International, trabajando bajo un contrato de Redstone, creó la carga acumulativa principal de la cabeza de guerra de Javelina. Los avances en la eficiencia de carga acumulada han llevado a la aparición de la protección dinámica. La protección dinámica se encuentra en la armadura principal del vehículo y detona cuando recibe municiones. La explosión no daña la armadura principal del vehículo, pero al mismo tiempo la placa de metal disparada destruye el chorro de munición acumulado. Para superar la protección dinámica, Javelin utiliza una ojiva acumulativa en forma de tándem. La carga principal activa la protección dinámica y la carga principal no pierde su poder destructivo. Este concepto se aplicó por primera vez al cohete TOW y se basó en el trabajo realizado por el Laboratorio de Investigación Balística y el Arsenal Picatinny.
Los desarrolladores, Javelina, inicialmente intentaron hacer funcionar la ojiva tándem. Aunque la carga principal desarrollada por Physics International, que usó un revestimiento de cobre para formar un chorro penetrante, mostró buenos resultados, la carga principal con un revestimiento de cobre apenas supera la protección dinámica. El competidor en el desarrollo de la ojiva fue la empresa Conventional Munitions Systems Inc. (CMS), que adquirió una compañía llamada Orlando Technology Inc. Esta empresa tenía sus propios modelos de computadora y desarrolló un exitoso diseño de carga líder utilizando un revestimiento de molibdeno de dos capas. Como resultado, se utilizó el diseño de carga líder de CMS y la carga principal de Physics International en Javelina.
Otro problema en el desarrollo de la cabeza de guerra en tándem Javelina fue proteger la carga principal tanto como sea posible de las posibles consecuencias de un ataque con misiles en un objetivo o la detonación de una carga principal (conmoción cerebral, onda de choque, fragmentos de misiles). Los fragmentos del cohete y la onda de choque pueden afectar negativamente a la formación de un chorro de la carga principal. Para limitar la interferencia entre la carga principal y la principal, se colocó una pantalla protectora diseñada por Redstone Arsenal. Fue la primera pantalla compuesta a prueba de explosiones y la primera a través de la cual se hizo un orificio a través del medio que proporciona protección para el chorro acumulativo.
La siguiente etapa de actualización de la ojiva Javelina incluyó cambiar el recubrimiento de la carga principal para obtener un chorro de mayor velocidad. Estos cambios harán que la ojiva sea más eficiente en términos de penetrabilidad y, por lo tanto, reducirán el tamaño de la carga y utilizarán el espacio vacío para aumentar el tamaño del motor de combustible sólido y, en consecuencia, aumentar el alcance del misil. El trabajo técnico en esta etapa se llevó a cabo en Picatinny Arsenal y General Dynamics Ordnance and Tactical Systems, que asumió parte del trabajo de Physics International.
Durante el desarrollo del sistema Javelin ATGM, se implementaron mejoras importantes en el área de los fusibles y el despliegue de una ojiva a un pelotón de combate. Antes de Javelina, los fusibles eran principalmente mecánicos y consistían en engranajes, rotores, cheques, etc. Sin embargo, con la llegada de varias ojivas en un cohete, los retrasos de tiempo variables, las restricciones de peso y volumen, así como los requisitos de seguridad más estrictos, la instalación de fusibles mecánicos en Javelin y otros misiles se ha vuelto inaceptable. Como resultado, se utilizó un sistema electrónico de fusibles y la colocación de las ojivas en un pelotón de combate en estos misiles. Este concepto se basa en los resultados de las ojivas nucleares llevadas a cabo en Sandria y Los Alamos y fue implementado por ingenieros en el Arsenal de Redstone en medio de los 1980. Recibió el nombre ESAF (Electronic Safe Arming and Firpe, sistema de protección electrónica, armado de ojivas y disparos). Los primeros sistemas ESAF resultaron ser demasiado engorrosos, pero el desarrollo de la microelectrónica permitió que se usaran no solo en Javelin, sino en otros sistemas, como los misiles Hellfire.
El sistema ESAF permite el despliegue de una ojiva a un pelotón de combate y disparos, sujeto a ciertas condiciones con respecto a la seguridad del misil. Después de que el operador aprieta el gatillo, el ESAF ordena que arranque el motor. Cuando el cohete alcanza una cierta aceleración (señala al sistema que el cohete abandonó el contenedor de lanzamiento y se retiró a una distancia segura del operador) y en combinación con otros factores, la ESAF produce una "segunda cabeza de combate en un pelotón de combate" necesaria para lanzar el sostenedor. Después de otra verificación de las condiciones relevantes (por ejemplo, la presencia de un objetivo capturado), la ESAF inicia un "pelotón de combate final", que permite a la cabeza explosiva detonar cuando golpea el objetivo. Entonces, cuando un cohete golpea el objetivo, el ESAF inicia la función de una ojiva en tándem, proporcionando el intervalo de tiempo necesario entre la detonación de las cargas principales y principales.
- John Lyons, Duncan Long, Richard Chait
- Sistemas de misiles Stinger y Javelin
- Dificultades tecnológicas críticas en el desarrollo de ATGM Javelin. Parte de 1
Dificultades tecnológicas críticas en el desarrollo de ATGM Javelin. Parte de 2
información