El inicio del camino de los robots andantes.
En la actualidad, varios sistemas robotizados se están poniendo activamente en servicio y, además, se está formando una nueva generación de sistemas que pueden pasar a donde pueden pasar las personas. Sin embargo, se necesita hacer mucho más antes de poder verlos a su lado en el teatro.
Los sistemas no tripulados de tierra y aire son una herramienta importante para los militares modernos, su uso se ha convertido en la norma, no en la excepción. Los conflictos en Irak y Afganistán llevaron a su crecimiento exponencial, se gastaron miles de millones de dólares en el desarrollo y la compra de tales sistemas.
Si bien los sistemas como el Reaper UAV atraen mucho interés, el desempeño de sus contrapartes terrestres también merece todos los elogios. Debido al hecho de que los dispositivos explosivos improvisados (IED, por sus siglas en inglés) representan la mayor amenaza para las fuerzas desplegadas en Afganistán, los vehículos terrestres automáticos (AHA, por sus siglas en inglés) han llegado a primer plano. Estos sistemas participan diariamente en las llamadas tareas "estúpidas, sucias y peligrosas", y en el desempeño de sus funciones, a menudo reciben daños, a veces "letales". A pesar de las enormes cantidades de dinero invertidas en sistemas robóticos, su campo de actividad todavía se limita a las tareas de neutralización de objetos explosivos, que, en función de las necesidades operativas, está completamente justificado. Sin embargo, en la actualidad, la funcionalidad de la ANA está comenzando a expandirse, están realizando cada vez más tareas de reconocimiento e incluso tareas de logística.
Hay oportunidades para ampliar el alcance de los sistemas robóticos y no solo en el sector militar. Los avances en los sistemas robóticos podrían conducir a sistemas que puedan trabajar juntos e interactuar con los humanos a nivel físico, social y cognitivo. También, en su mayor parte, podrán realizar tareas para o con personas en entornos industriales como fábricas. Los sistemas robóticos terrestres militares, con muchas tareas potenciales, podrían ser el mejor amigo de cada soldado, por ejemplo, podrían llevar su equipo, realizar vigilancia avanzada e incluso evacuarlo del campo de batalla. Sin embargo, queda un gran problema: los sistemas actuales, a pesar de su abundancia, no pueden llegar a donde puede ir un soldado. Muchos ANA tienen un alto grado de movilidad, pero sus configuraciones con ruedas y orugas limitan su uso. A Robots capaces de volverse cien por ciento útiles, necesitan aprender a caminar. “Andar” debería convertirse en el único tipo de locomoción (un conjunto de movimientos coordinados por los que el robot se mueve en el espacio), bueno, o al menos parte de las posibilidades de un diseño híbrido.
En su mayor parte, la inversión en sistemas para caminar fue mínima, las empresas de defensa poderosas apenas tocaron esta área, y las empresas especializadas, las universidades y los institutos de investigación "manejan la pelota". Si bien estos sistemas, en su mayor parte, recibieron poca atención, las capacidades de los robots que pueden trabajar al lado de los humanos o en su lugar no han pasado desapercibidas. Y eventos como el DRC (DARPA Robotics Challenge, pruebas prácticas de sistemas robóticos bajo el programa de la Oficina de Investigación y Desarrollo Avanzados del Departamento de Defensa de EE. UU.) Brindan un apoyo eficaz para estas tecnologías.
Los robots que caminan tienen muchas ventajas: son muy adecuados para terrenos difíciles, pueden subir escaleras, superar zanjas y trabajar donde las ruedas y las vías no pueden. Estas son tareas de ingeniería complejas, y se necesitan recursos significativos para aprovechar los robots en aplicaciones civiles y militares.
Una de las primeras tareas que los militares consideran para los sistemas de caminar es la logística. En Afganistán, en particular, debido a las condiciones ambientales desfavorables y las acciones agresivas de los rebeldes, puede haber importantes problemas de movilidad, que pueden afectar adversamente los materiales tradicionales y los suministros técnicos proporcionados por las plataformas terrestres o aéreas. El personal desplegado también lleva cada vez más cargas pesadas, ya que la cantidad de equipos que utilizan en el proceso de servicio está en constante y rápido crecimiento.
Sistema de apoyo del escuadrón de piernas
Con este fin, el Cuerpo de Marines y el Ejército de los Estados Unidos estudiaron hace algún tiempo la posibilidad de convertir pequeños vehículos tripulados en sistemas automáticos; El ejército con un éxito notable ya ha experimentado un sistema de apoyo para el SMSS (Sistema de Apoyo de Misión Squad) de Lockheed Martin en Afganistán. Sin embargo, la principal preocupación es la incapacidad de SMSS y otros vehículos similares para moverse donde los soldados y la infantería pueden moverse, en lo que deberían ayudar. La exhibición de los soldados en Afganistán se ha convertido en un problema tan grave que se llamó a las mulas para que sirvieran para apoyar a las tropas que sirven en terrenos difíciles. Pero este enfoque es sólo una medida temporal.
Para resolver este problema, los infantes de marina están trabajando actualmente con DARPA en un sistema de soporte de piernas con sistema de soporte de escuadrón (LS3). El objetivo de este trabajo es combinar la movilidad y las capacidades logísticas en un sistema que podría mover 400 libras (181 kg) de equipo a una distancia de más de 32 km sin tener que intervenir durante las horas de 24, y también podría mantener el ritmo con la unidad a la que estaba conectado.
El robot LS3 de cuatro patas se convirtió en el desarrollo del sistema BigDog, que también fue creado por Boston Dynamics. Las últimas pruebas de campo del robot se realizaron en diciembre 2012 del año en Virginia; El trabajo de dos semanas se llevó a cabo en colaboración con el laboratorio de combate de la Infantería de Marina. Las patas LS3 tienen actuadores hidráulicos con sensores para distribuir las fuerzas y posicionar todas las juntas. El sistema puede funcionar y mantener el equilibrio en un suelo suelto, resbaladizo y desigual, así como aumentar cuando pierde el equilibrio.

El robot LS3 tiene un alto grado de movilidad y puede llevar cargas considerables sobre sí mismo.
Durante la prueba, se demostraron cinco capacidades del sistema: 1) comandos de voz; 2) operaciones nocturnas; 3) órdenes “go”; 4) percepción del entorno; 5) ajuste de pie intelectual.
El gerente del programa LS3, el teniente coronel Joseph Heath, identificó la confiabilidad operativa y la percepción de la plataforma como las tareas principales que deben resolverse para este sistema. Mientras que el primero es un desafío de ingeniería, el segundo requerirá mejorar las capacidades cognitivas del sistema. Este problema de la robótica no se resuelve tan fácilmente, y necesita prestar mucha atención.
Si los sistemas robóticos, para caminar o de cualquier otro tipo, deben funcionar en una situación real, su conocimiento del espacio circundante en el que están desplegados será una condición clave para su efectividad.
El objetivo del programa LS3 es operar el sistema sin aumentar la carga cognitiva en los soldados de infantería. Para lograr esto, la carga cognitiva debe colocarse en el propio sistema.
“Si desea que el vehículo se controle de forma remota o simplemente siga al operador, creo que el software no es un problema en este caso. Si desea que se mueva solo y camine por el bosque sin control personal, entonces, de repente, se encuentra en un nivel de complejidad completamente diferente ", dijo el profesor Gregory Dudek, director de la escuela de informática y ex director del centro de máquinas inteligentes.
“Tenemos una máquina para caminar, él puede estudiar y recordar cómo es un terreno determinado y, por lo tanto, si un robot se encuentra con el mismo terreno nuevamente, no necesita mucho tiempo para entenderlo, ya ha aprendido las propiedades de dicho terreno. Esto es factible, pero puede ser difícil ... El entorno terrestre es quizás el más difícil: muchos obstáculos, muchas variables y muchas interacciones. Y los sistemas para caminar, debido a su versatilidad, también tienen diferentes tipos de fallas, pueden tropezar, caer, patear algo, pero empujan los límites de lo que podemos hacer. Creo que los sistemas para caminar están relacionados con dispositivos muy complejos, pero, como ya se mencionó, el problema de la movilidad para caminar, dónde colocar el pie, incluso en un sistema tan complejo como LS3, se resuelve bastante bien ".
[media=http://www.youtube.com/watch?v=OuGZjsKQxbI]
Video del sistema de soporte para caminar del sistema de soporte Legged Squad (con mis subtítulos)
El profesor Dudek cree que la tarea principal es proporcionar sistemas con la capacidad de percibir a distancia: "Por ejemplo, intente calcular a cierta distancia, de antemano, su capacidad para superar una pila de escombros de construcción antes de pisarlo". Creo que todavía hay mucho trabajo por hacer en esta dirección. La pregunta no es solo si el robot puede o no puede ir a alguna parte, sino también cuán rápido puede hacerlo; Será importante tener la capacidad de predecir el rendimiento de la tarea en diferentes escenarios. Si no puede predecir el rendimiento de su tarea, es muy difícil elegir una secuencia de acciones ".
Con el fin de mejorar el proceso de percepción de los robots y permitirles actuar de forma independiente, es importante capacitarlos con habilidades de aprendizaje. Aunque los sensores pueden proporcionar una conciencia física y situacional, solo a través de la capacitación los robots pueden aprender a interactuar mejor con su entorno externo.
"Los robots no cognitivos son estúpidos porque cometen los mismos errores una y otra vez", dijo el profesor Peter Jonker, del Instituto de Robótica de la Universidad de Delft, que se especializa en ingeniería e interacción robot / humano que en aplicaciones de defensa. Los sistemas cognitivos aprenden a reconocer y obtener información sobre los objetos y sus propiedades. El progreso en la percepción y el entrenamiento del robot se debe en parte a la capacidad de crear tablas de referencia grandes, se forman a partir de dependencias cognitivas entre los datos de entrada y salida; Esto fue posible al mejorar el procesamiento de datos y aumentar la cantidad de memoria a bordo de los robots. "Incluso hace 10 o 15 hace años, no teníamos una memoria tan grande ... y ahora tenemos gigabytes de memoria, por lo que podemos almacenar todo en tablas de referencia y funciona. Aparentemente, parece que el trabajo del cerebro y el sistema de conceptos y actitudes aquí son exactamente lo mismo ", explicó Jonker. Además, aquí se jugó un papel importante y aumentar la potencia de cálculo.
El uso de robots en el mundo real.
Las pruebas de DRC están a la vanguardia del desarrollo de robots funcionales con aplicaciones en el mundo real, en este caso, asistencia en áreas de desastre. Reúnen los problemas de percepción, movilidad y utilidad, se distinguen por varias características únicas asociadas con una persona. Una de ellas son las condiciones externas en las que deben trabajar los robots. DARPA reconoció que los desastres y las catástrofes ocurren principalmente en un entorno diseñado para el uso humano, no es complicado ni estructurado.
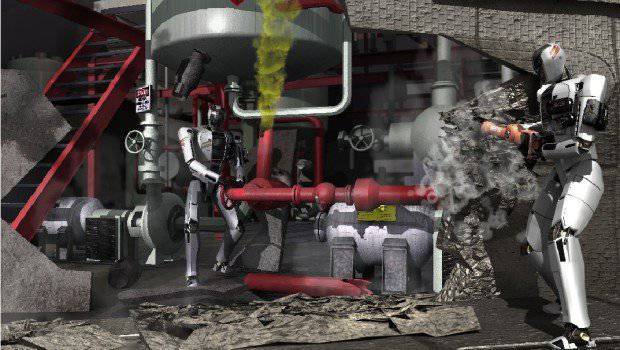
Actualmente, las tareas previstas por estas pruebas (competiciones) incluyen: conducir un vehículo universal; movimiento bajo el curso a través de un montón de piedras; remoción de escombros de la puerta; abriendo la puerta y entrando al edificio; subiendo la escalera y luego moviéndose más alrededor del edificio; usando herramientas para pasar a través de un panel de concreto; detección y cierre de la válvula cerca del tubo de flujo; y sustitución de componentes, como una bomba de agua.
DARPA no proporcionó públicamente información sobre el nivel de autonomía que deberían tener los robots, pero expresó al comienzo de la competencia que las tareas se establecerían de manera tal que enfatizaran la importancia de la autonomía de los robots en el nivel de tarea compleja, por ejemplo, se le daría al robot la orden de abrir la puerta independientemente de control cuidadoso DARPA también cambiará la calidad de los canales de comunicación durante la prueba y la reducirá gradualmente para ver cómo los robots se encargarán de sus tareas en tales condiciones.
El profesor Dudek dijo que el nivel de autonomía de los sistemas robóticos siempre es un tema controvertido. "Hablar de cuánta autonomía habrá en estos sistemas, me parece vacío. Si desea que funcionen bien inicialmente y se ajusten a usted, no es necesario que sean demasiado autónomos ... Algunas tecnologías son bien entendidas y funcionan bien, pero creo que es una mala idea hacerlas autónomas en el futuro cercano ... solo porque Cuando surge un problema, la pregunta es: ¿quién asumirá la responsabilidad?
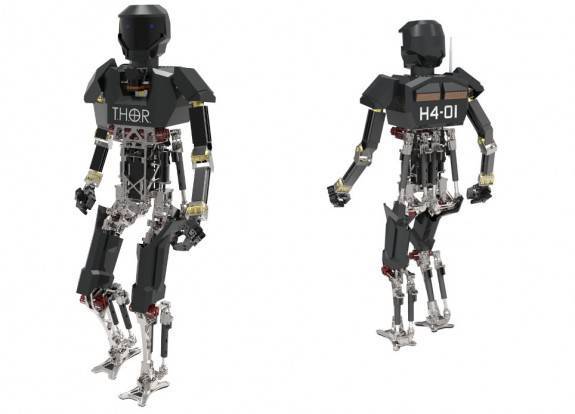
El equipo de Virginia Tech presenta el nuevo robot humanoide de THOR en DRC
[media=http://www.youtube.com/watch?v=_FcmRM9m13A]
Vídeo de presentación del robot THOR por el equipo de Virginia Tech.
Sistemas humanoides
Aunque el proyecto de DRC no especifica la configuración de los robots que participan en él, varios equipos presentaron modelos humanoides de dos patas. Lo mismo se aplica a los sistemas provistos por el gobierno.
La cuestión de qué forma deben tomar los robots ambulantes se debate ardientemente, mientras que las respuestas obviamente dependen del papel del sistema. Surgieron muchas ideas sobre el uso de modelos humanoides. "Este es un tema controvertido", explicó Dudek. Según él, "si entrevista a los especialistas en robots 10, obtendrá tres o cuatro respuestas diferentes, y hasta cierto punto estas respuestas son predecibles, basadas en la posición geográfica de la persona ... Hay una clara separación entre Japón y los proyectos humanoides de Europa Occidental, EE. UU. Y Canada Mi opinión es que la locomoción bípeda parecida a la humana no es lo que necesitamos en este momento ".
Las construcciones humanoides tienen dos ventajas clave: una de ellas es que su forma les permite adaptarse bien al trabajo en un entorno creado para las personas; la segunda es que las personas tienen más probabilidades de aceptar robots humanoides. El Dr. Heike Valleri, especialista en ingeniería biomecánica en la Universidad de Delft, explicó: "La cinemática y los controles humanos se desarrollaron juntos, se encontró un modelo óptimo, incluso desde un punto de vista energético ... Por lo tanto, si hacemos robots con propiedades similares, entonces probablemente se comportarán como personas ".
Varios equipos que compiten en la República Democrática del Congo presentaron proyectos que se desvían un poco del concepto humanoide.
Al comienzo de 2013, un equipo del Centro Nacional de Ingeniería Robótica de la Universidad Carnegie Mellon (CMU) anunció los detalles de su miembro. La plataforma móvil altamente inteligente de esta universidad, creada por un equipo llamado Tartan Rescue, recibió la designación CHIMP (CMU Highly Intelligent Mobile Platform). Es un robot de tamaño humano que se mueve sobre pistas de goma incorporadas en cada una de sus cuatro extremidades, en lugar de caminar como un humano.
El fundamento de este enfoque de la movilidad es que conducir en pistas ofrece una mayor velocidad y es más sencillo que desarrollar una solución para caminar. Si es necesario, CHIMP también puede moverse en las pistas de dos extremidades, por ejemplo, cuando es necesario usar otras dos extremidades para realizar tareas difíciles y complejas.
De acuerdo con el líder del equipo de Tartan Rescue, Tony Stents, es probable que las tareas de DRC se "agudicen" por las características de los robots humanoides móviles, pero en este caso, se requieren complejidad, consumo de energía y más recursos de computación.
CHIMP puede capturar y controlar objetos con sus cuatro manipuladores al final de cada extremidad. También tiene fuerza y agilidad casi humana.
CHIMP usa sensores a bordo para construir modelos 3D del mundo circundante con texturas que brindan conciencia de la situación y le permiten mantener el equilibrio. El operador proporciona el mismo modelo para visualizar la ubicación y orientación del robot.

El robot CHIMP tiene un diseño híbrido, en el que las ventajas de la locomoción de las ruedas (movimiento) se combinan con la capacidad de subir escaleras y manipular objetos.
El equipo de desarrollo apunta a las articulaciones controladas del robot CHIMP, desarrollado por el centro nacional de ingeniería robótica, como elementos clave que le permitirán realizar diversas tareas dentro del DRC. Por ejemplo, tres articulaciones en cada miembro permiten que el robot tenga un agarre similar al humano. Otras características clave incluyen los sensores de cabeza y bisagra "receptivos", que brindan retroalimentación al sistema y permiten que el robot se mueva, sostenga objetos, recoja basura y desechos de construcción de manera segura.
"Personalmente, creo que esta es la dirección correcta", dijo el profesor Dudek y agregó: "Creo que con modelos puramente humanoides es muy difícil lograr eficiencia en términos de costo y confiabilidad, aunque las pruebas DARPA están diseñadas de muchas maneras. Para enfatizar la necesidad de un robot humanoide. El hecho de que veas personas que no buscan crear modelos humanoides para una competencia que se pretende que sea una competencia humanoide habla de algo. "Creo que no importa quién gane la competencia DARPA, tendrá un impacto en el desarrollo de la robótica psicológica, incluso si no con el diseño óptimo, ya que las respuestas a algunas de las preguntas estarán dadas por los resultados finales de este proyecto".
El Dr. Valleri cree que los tipos de robots humanoides no serán ampliamente utilizados: “No creo que las estructuras antropomorfas sean ampliamente utilizadas, por supuesto, con la excepción de los brazos y las piernas; En el futuro, no habrá muchos robots humanoides viables ".
Los trabajos sobre proyectos biomiméticos (imitación de criaturas biológicas) no se limitan a plataformas humanoides. La compañía Boston Dynamics y el equipo del laboratorio de biomimética del Instituto de Tecnología de Massachusetts están desarrollando robots que son un desarrollo adicional del proyecto Cheetah ("Cheetah"). Estos sistemas han demostrado la capacidad de funcionar a una velocidad decente. El robot Boe Dynamics Dynamics Cheetah tiene el récord mundial de robots ambulantes, alcanzando una velocidad máxima de millas / hora 28,3 (km / h XUMX). La próxima generación de robots Cheetah, llamados Wildcat ("Wildcat"), podrá trabajar sin un cable atado. Las primeras pruebas de Wildcat han comenzado recientemente, y las pruebas prácticas al aire libre están programadas para realizarse al final de 45,5. Después de resolver todos los problemas de ingeniería complejos, los sistemas de este tipo encontrarán aplicaciones en las operaciones de reconocimiento y búsqueda y rescate.
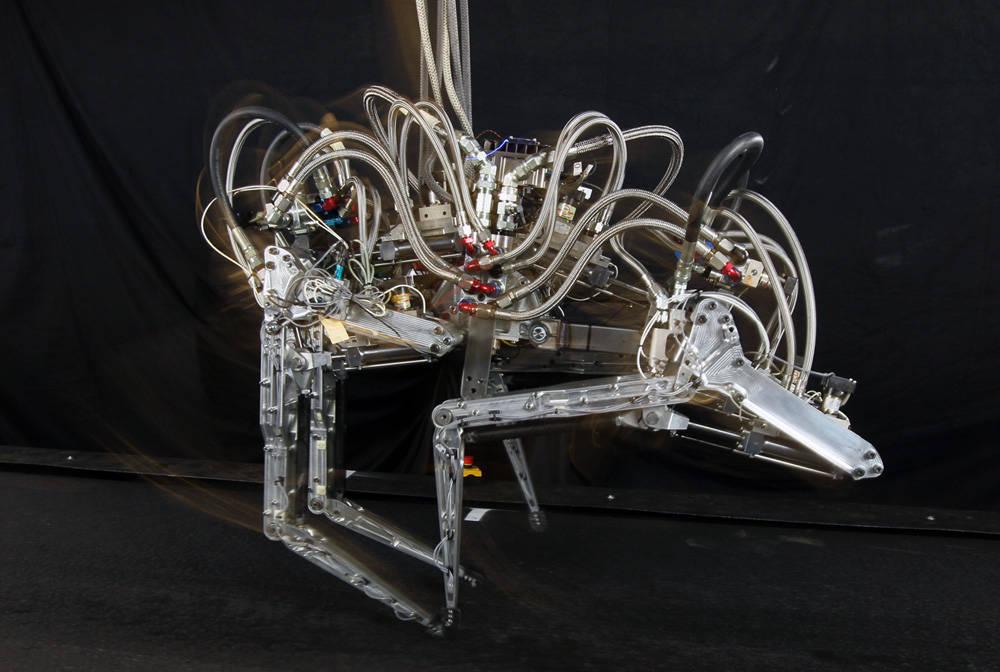
El robot que camina Cheetah tiene un récord mundial de velocidad para sistemas similares
[media=http://www.youtube.com/watch?v=chPanW0QWhA]
Cheetah Robot Record Run Video
Se han desarrollado muchos sistemas biomiméticos, entre ellos hay diseños inspirados en, entre otras cosas, cucarachas e insectos palo. Algunos robots tienen la capacidad de escalar paredes; Sus configuraciones de patas múltiples permiten niveles muy altos de movilidad y estabilidad.
Un problema que Dudek cree que puede surgir para los sistemas cognitivos es su certificación para un uso seguro, ya que su comportamiento y capacidades cambian en el proceso de aprendizaje. Debido a los estrictos requisitos impuestos por el Pentágono, otroоLas mayores dificultades serán experimentadas por el sistema para los militares. "Los sistemas militares tienden a empujar los límites de su autonomía, pero al mismo tiempo aumenta el costo del fracaso".
El consumo de energía es quizás la tarea más grande y difícil para los diseñadores de sistemas para caminar. Sus diseños complejos con servos hidráulicos y eléctricos consumen una gran cantidad de energía, y las tecnologías energéticas actuales no pueden resolver estas necesidades. En el robot LS3, este problema se resolvió mediante el uso de un motor de combustión interna tradicional, pero esto no es adecuado para todos los sistemas y requiere un avance significativo en la tecnología de almacenamiento de energía.
"Todavía tenemos problemas de energía muy grandes. Todavía tenemos problemas para transportar suficiente energía que permitiría que los sistemas sean bastante eficientes y verdaderamente autónomos ", dijo el Dr. Martin Wisse, especialista en sistemas para caminar en la Universidad Tecnológica de Delft. El profesor Dudek cree que la industria de la robótica puede aprovechar el desarrollo de otras áreas para resolver este problema: "Creo que otras industrias darán un gran impulso, ya que la administración de la fuente de alimentación para dispositivos móviles es un gran problema en muchas áreas, por ejemplo, en vehículos eléctricos y portátiles. dispositivos electronicos
Los robots pueden obtener beneficios en otras industrias, no solo en el sector energético. Después de todo, los sistemas sensoriales que necesitan los robots se desarrollan principalmente en otros lugares y en su mayoría corresponden a los requisitos actuales.
“No veo a los sistemas sensoriales como un área donde puede venir una investigación revolucionaria seria. Creo que obtener escáneres de telémetro láser de alto rendimiento, pequeños y baratos, es un problema que requiere mucho trabajo para resolver. Esto debería suceder y mucho se resolverá en el sector civil ", dijo Dudek, explicando que" las tecnologías láser y lidar (localizadores láser) se han vuelto extremadamente populares, la potencia de estos dispositivos ha aumentado, pero su uso en sistemas para caminar es un dolor de cabeza. "El costo del sistema aumenta de inmediato, por lo que es muy importante lograr un lidar barato y confiable que resista las sacudidas y los temblores".
Tecnologia disponible
El Dr. Wisse notó la disponibilidad de un solo sensor, evaluándolo como un avance importante: “La visión de 3D se está desarrollando, y el mérito considerable de esto es el sensor Kinect de Microsoft. El mercado real para él es mucho más grande que el mercado de sistemas robóticos, por lo que no hay necesidad de desarrollar algo similar en robótica ".
Wisse recordó otro desarrollo que vino del software. Dijo que el sistema operativo abierto para robots. El sistema operativo de robot permitió a la robótica escribir código que puede integrar sensores como, por ejemplo, Kinect, con robots.
Desde un punto de vista mecánico, las tareas complejas parecen centrarse en la confiabilidad y en reducir la masa de materiales y componentes.
"Creo que los problemas reales en la implementación de tales sistemas son algo prosaicos, la pregunta aquí es cómo manejar las fallas mecánicas y hacer que el sistema sea razonablemente confiable", dijo Dudek. - La robótica necesita especialmente la fiabilidad de sus sistemas, especialmente los robots ambulantes. Los sistemas para caminar tendrán grandes vibraciones, por lo que todo lo que incorpore en estos sistemas debe ser resistente a las sacudidas ... por lo tanto, los requisitos para los sistemas de energía, baterías y otros componentes son altos. Este es un gran problema ".
Los robots de una compañía estadounidense demuestran cómo pueden ser los sistemas modernos y funcionales. El Dr. Wisse comentó: “Los sistemas de Boston Dynamics enfrentan bien los problemas de ingeniería. Solo necesitamos que todos los componentes funcionen sin problemas y sean confiables. Esta es una cuestión de dinero y buen diseño ".
El Dr. Valleri señaló la importancia de crear robots ligeros para la seguridad general. “Hay muchas razones para hacer que los robots sean fáciles; Necesitas menos energía y es menos peligrosa. Si haces un robot humanoide, lo más probable es que funcione junto a la gente ". Ella cree que se necesita trabajo para mejorar los actuadores y que deberían ser más fáciles y más efectivos.
El Dr. Wisse cree que hay obstáculos no solo en forma de grandes dificultades técnicas. El enfoque actual del desarrollo de la tecnología robótica no trae mucho beneficio a la industria, y se necesitan cambios en este sentido. “Creo que el desarrollo real será solo si encontramos el alcance y encontramos un gran grupo de usuarios para nuestra tecnología y negocio sostenible que paga por el desarrollo continuo. Realmente creo que tenemos que echar un vistazo a lo que podemos usar ahora para mejorar la vida de las personas ... Creo que deberíamos trabajar paso a paso, paso a paso, debemos hacer todo lo posible para crear y utilizar los mercados, y No cree hojas de ruta tecnológicas, donde nos concentraremos solo en el desarrollo de la tecnología. No creo que el camino a seguir sea la creación de robots humanoides más avanzados en un período de tiempo determinado, creo que la tecnología robotizada puede ser más barata debido a la creación generalizada de mercados masivos ".
información