Yak-44E - observación y guía de radar de aviones
Yak-44E: patrulla, orientación y control de radar de aeronaves de cubierta y contramedidas electrónicas. Esta máquina fue desarrollada a mediados de la década de 1970 en la Oficina de Diseño. Yakovleva En diferentes años, la creación de la aeronave fue liderada por Yakovlev A.S., Levinsky A.A., Yakovlev S.A. y Dondukov A.N., y desde enero de 1991 hasta el cierre del proyecto, el tema del Yak-44 fue dirigido por V. Mitkin El prototipo del Yak-44 fue el estadounidense E-2 Hokai. Se supuso que el avión se basará en el proyecto nuclear Ulyanovsk 1143.7. Además, se suponía que el avión entraría en servicio aviación tropas fronterizas Debido a dificultades en el desarrollo de equipos a bordo, la creación de la aeronave se retrasó. Se construyó un prototipo Yak-44, que se mostró por primera vez al público en 1992 en la exhibición aérea de Moscú.
El desarrollo del radar aeronáutico Yak-44E está directamente relacionado con la creación de portaaviones de la URSS, así como con la creciente importancia del soporte de información para las acciones de la aviación naval, especialmente a gran distancia de los aeródromos.
Como saben, en la formación de conceptos para la creación y el uso de portaaviones en la URSS, y más tarde en Rusia, se tomaron decisiones muy controvertidas e inconsistentes que llevaron a decisiones similares durante el desarrollo de la política técnica y el desarrollo de aeronaves para estos buques.
De hecho, la moderna flota de portaaviones rusos consiste en una sola nave y dos docenas de aviones Su-33. Sin embargo, incluso estas fuerzas que forman parte de la agrupación de la nave están indefensas si no hay información oportuna sobre el enemigo de la superficie y el aire, que se proporciona de manera más efectiva solo por la aeronave de la observación y la guía del radar que opera como parte del grupo aéreo del portaaviones.
El problema del soporte de información de las agrupaciones de barcos se resuelve mediante la instalación de ofertas especiales. Complejo de radio en varias plataformas, que se consideran aviones, helicópteros, globos, aviones convertibles, aeronaves, vehículos aéreos no tripulados, así como buques. Actualmente, las plataformas más eficientes son las aeronaves. El proyecto más exitoso en esta área es el avión RLDN Yak-44E, desarrollado por el Design Bureau. Yakovlev. La creación de este avión fue precedida por el trabajo en portaaviones prometedores.
En 1968, simultáneamente con el desarrollo del crucero antisubmarino del proyecto 1143 en el Nevsky Design Bureau, se inició la investigación sobre la aparición de un portaaviones con un avión de despegue por eyección (proyecto 1160).
Inicialmente el armamento aviones de la compañía incluye polivalentes MiG-23A con alas variable de barrido, subsónica ASW aviones P-42, barco de choque supersónica Su-24K con alas de geometría variable, así como la cubierta Ka-252.
Pero en 1972, en el diseño avanzado del portaaviones, se incluyeron varias variantes de barcos del caza de primera línea Su-27. Ahora grupo de aire consistía en 12 Su-29K o Su-27K, 12 Su-28K, exploradores 4 Designadores Su-28KRTS, 6 ASW aviones P-42, aviones 4 P-42 en la realización, vigilancia radar y orientación y helicópteros 8 Defensa antisubmarina Ka-252.
El avión de defensa antisubmarino subsónico P-42 fue desarrollado por OKB. Beriev de acuerdo con la decisión de la URSS Consejo de Ministros de la Comisión de Asuntos Militares Industriales de 5 de junio 1971. P-42 en el esquema general fue repetido en gran medida por el avión de defensa antisubmarino S-3 "Viking" de la Armada de EE. UU. La máquina se llevó a cabo de acuerdo con el esquema de ala alta con un ala de barrido moderado, empenaje trapezoidal clásico con timones y altura, y dos motores D-36 debajo del ala en las góndolas.
El despegue de la aeronave se llevaría a cabo desde la catapulta de la nave, y el diseño del chasis y el fuselaje se calcularon para aterrizar con el frenado por un finalizador de aire. La quilla y la consola de ala P-42 para ahorrar espacio cuando se almacenan en el hangar y en la cubierta de un portaaviones plegado.
Además de la variante principal de la defensa antisubmarina, planeaban desarrollar variantes de los aviones de cubierta de la patrulla de radar, el petrolero, el transporte, la búsqueda y el rescate, etc. El desarrollo del diseño preliminar del P-42 se completó en el año 1972. En 1976, las pruebas de vuelo de un avión prototipo comenzaban.
El primero fue el diseño del avión de defensa antisubmarino P-42, y se pospuso el desarrollo de la variante P-42 del reloj y guía del radar. Pero los combatientes del grupo de aeronaves de la nave del proyecto 1160 no pudieron proporcionar efectivamente la defensa aérea de la unidad naval, que era la tarea principal del portaaviones, ya que no había ninguna aeronave de patrulla de radar para controlar sus operaciones de combate.
En la primavera de 1976, sobre la base del trabajo de desarrollo de NPKB en portaaviones, el gobierno adoptó una resolución para desarrollar en 1976-1977 y crear por el 1985, dos portaaviones atómicos del proyecto 1153. Según el concepto, los datos de la corte no difirieron del proyecto 1160, pero su grupo aéreo se redujo de los aviones 60-70 a 50.
La construcción de los cruceros de aviones pesados 1153 del proyecto 1977 en noviembre se abandonó, y la construcción de los buques 1143 posteriores, a partir del quinto, se decidió tener en cuenta no solo los helicópteros Ka-252 y los VT del tipo Yak-141, sino también el Su-25K y Su- 27K - despegue de aeronaves.
Por primera vez, el Yak-44 se menciona en los términos de referencia para el desarrollo del crucero de transporte de aeronaves pesadas del proyecto 11435 a partir de noviembre 1980 del año como un avión de patrulla de radar, que forma parte del ala del portaaviones. El proyecto 11435 implicó la creación de una nave con un desplazamiento de 55 ths. Tons con un grupo de aviones de aviones 46 (aviones RLDN Yak-44E, MiG-29K, Su-27K, Yak-141 y Ka-27). En el futuro, se negaron a llevar a cabo este TTZ, después de lo cual se creó la aeronave para el ala de avión del portaaviones del proyecto 27 Ulyanovsk. Opción basada en aeródromo prevista para entregar a la fuerza aérea.
En abril, 1981 decidió actualizar el segundo portaaviones pesado en construcción del proyecto 11434 en la dirección de aumentar el grupo aéreo del avión a 40 con la inclusión de los cazas MiG-29K y Su-27K. En la parte delantera de la cubierta de vuelo, se proporcionó la construcción de un trampolín para el despegue de los combatientes.

Foto en la memoria después de probar el funcionamiento del diseño del Yak-44E en TAKR "Tbilisi" Ave. 11435, septiembre 1990 (http://forums.airbase.ru)

El modelo del Yak-44E en la cabina de vuelo del TAKR "Tbilisi" Ave. 11435, septiembre 1990 (http://forums.airbase.ru)

Maqueta de tamaño completo del avión DRLOIU Yak-44E (http://militaryphotos.net)
Para el apoyo informativo de los barcos de agrupación de portaaviones y la gestión de las operaciones de combate de los combatientes, la patrulla de radar y la aeronave de orientación Yak-11434E se incluyeron en el grupo de aeronaves del portaaviones del proyecto 44. El desarrollo de Yak-44E fue dado por la oficina de diseño de Yakovlev en 1979.
Para noviembre de 1979, OKB im. Yakovleva los preparó. propuesta para el diseño de una aeronave basada en la cubierta de un portaaviones o aeródromos terrestres. Consideramos dos opciones para el complejo de radio: el Fakel (el radar estaba ubicado dentro del fuselaje en la popa y la proa) y el E-700 (la antena completa estaba ubicada sobre el fuselaje en el pilón). En marzo de 1980, en una reunión con S. Gorshkov, comandante en jefe de la Marina flota De la Unión Soviética, se tomó la decisión de crear un avión con el complejo de radio Fakel.
Debido a los problemas significativos con la creación del complejo radioeléctrico Fakel en 1983 de marzo, se detuvo el desarrollo de la versión correspondiente del diseño del avión. En octubre, el 1984 del año, en relación con el fallo de la flota de la versión de la cubierta de tiro del avión de control y detección de radar de largo alcance An-71, continuó el trabajo en los motores Yak-44E sin ascensor, equipados con motores de turbopropulsores y la antena de antena A-700 sobre el fuselaje en el pilón. En septiembre, 1988, se preparó un diseño avanzado de la nueva versión del avión. En enero, el 1989 del año adoptó un Decreto del Consejo de Ministros sobre la creación de una aeronave de patrullaje de radar multiusos Yak-44E con el complejo de radio E-700. En junio, se inició el 1989 del año con un diseño detallado. Hicieron un modelo constructivo-tecnológico de tamaño completo y un modelo a escala 1: 5 destinado a estudios de ingeniería de radio. Para probar el motor D-27 creó el laboratorio de aeronaves Yak-42LL. En TsAGI, en el período comprendido entre 1988 y 1991, el año realizó una investigación sobre la dinámica de la plataforma Yak-44RLD y la seguridad durante el despegue con el uso de un trampolín.
El Instituto de Investigación de Vuelo de la Fuerza Aérea en el complejo de pruebas en tierra en Saki (Crimea) realizó con éxito un experimento único para controlar la maniobra de aterrizaje y el aterrizaje de un grupo de aviones que consta de dos MiG-29 y un imitador de An-24 Yak-44E. El avión hizo un acercamiento a un ritmo dado. La protección del borrador del diseño técnico y el diseño del Yak-44 se llevó a cabo en enero del año 1990. En términos de sus características principales, el avión superó significativamente las últimas versiones del Hokai E-2С, el único avión de esta clase con un despegue por expulsión en el mundo.
La construcción de prototipos y la producción en serie adicional fueron planeadas para llevarse a cabo en la planta de aviación de Tashkent. La construcción del primer patrón de vuelo se inició en el año 1990. La cabina y la parte media del fuselaje se fabricaron en la planta piloto del OKB Design Bureau. Yakovlev, que fabrica el carenado de la antena, fue contratado en conjunto con el Ulyanovsk APO, el ala - en Ulan-Ude. 1990 se decidió a trabajar en el almacenamiento y transporte del Yak-44E en portaaviones utilizando un modelo simplificado de peso y tamaño. El diseño debería haber sido construido sobre la base de 1990, protegido en enero, de un diseño constructivo-tecnológico. En agosto, el 1990 del año, la Oficina de Diseño completó la revisión del diseño. El modelo se desmontó y se transportó a Sebastopol, donde se volvió a montar a bordo del crucero pesado que transportaba aviones "Tbilisi". La evaluación de las características del Yak-44E a bordo del crucero se llevó a cabo en poco tiempo, durante la primera mitad de septiembre 1990. En el curso de estos trabajos, se verificaron las posibilidades de amarrar y remolcar el avión en el hangar y en la cabina de vuelo, rodar sobre la plataforma y subir a la plataforma, descender al hangar, instalar en un lugar regular, emparejar el vehículo con puestos de soporte técnico en la cubierta y en el hangar. Al final del trabajo, el modelo de la aeronave se trasladó nuevamente a la Oficina de Diseño de Yakovlev en Moscú.
En el año 1992, después del colapso de la Unión Soviética, la financiación del trabajo en el avión Yak-44E se detuvo en la etapa de construcción de prototipos para pruebas. Anticipándose al MAKS-1995, se suponía que se mostraría el Yak-44E, pero el Ministerio de Defensa prohibió el espectáculo.
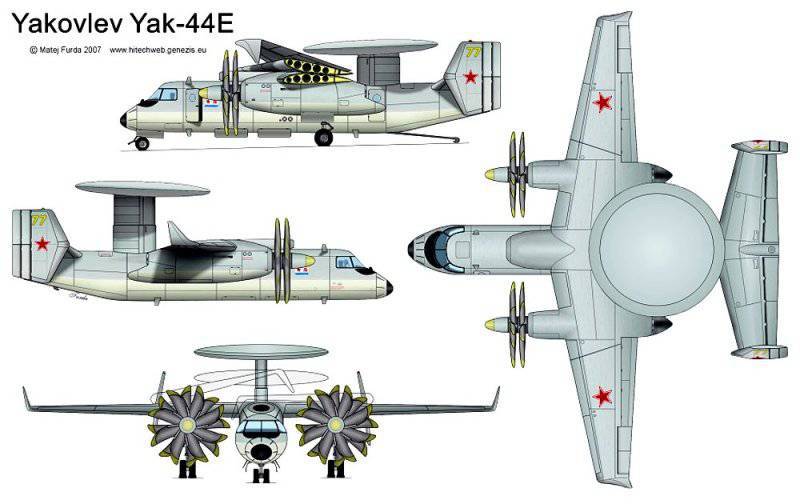
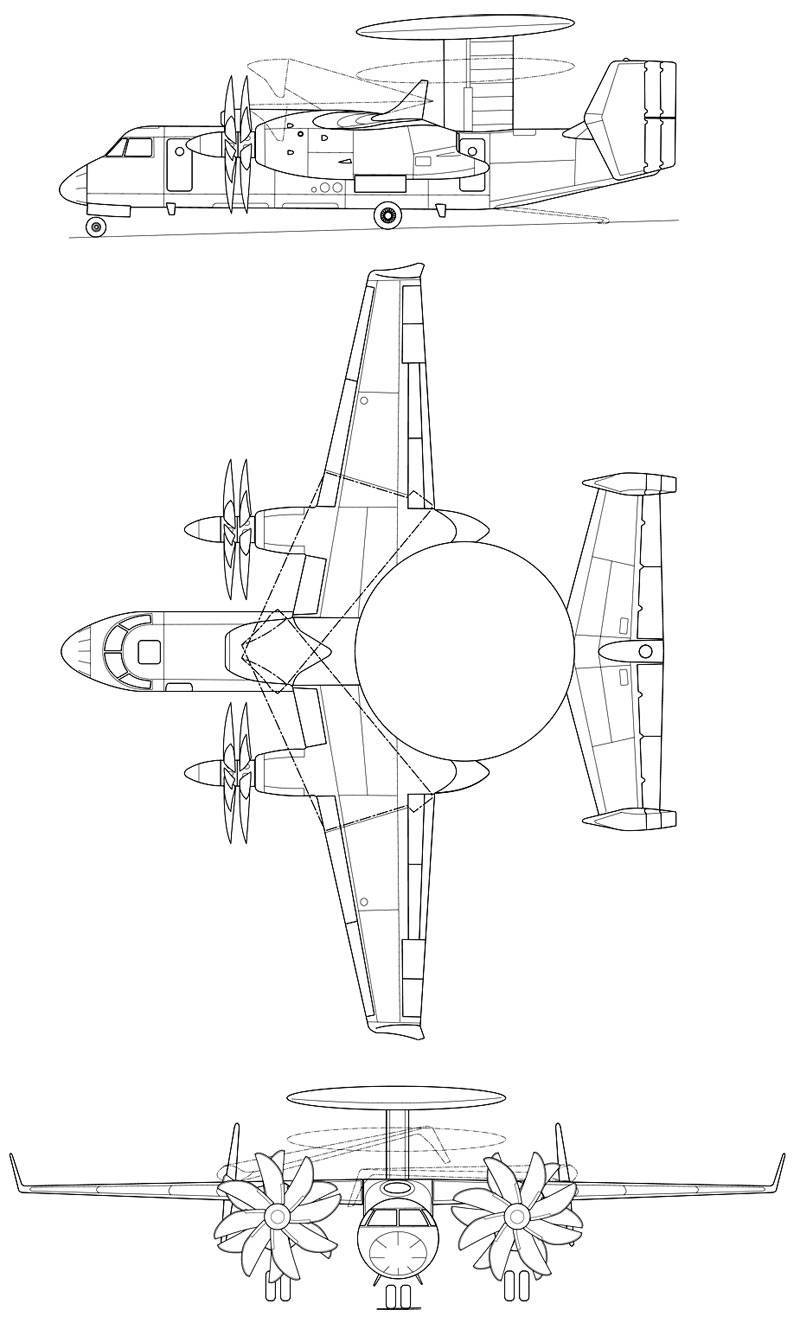
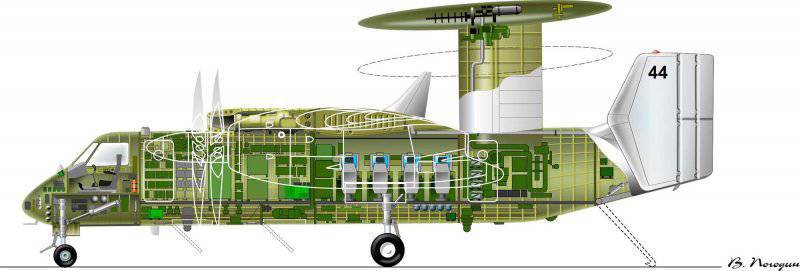
El avión de patrulla de radar Yak-44 se construye de acuerdo con la configuración aerodinámica normal. En la versión de cubierta, el avión tenía una torre de antena de radar plegable y alas plegables. Doble cola El fuselaje tiene una sección circular semi-monocócica. El fuselaje está equipado con una cabina de trabajo para operadores, un compartimento de descanso diseñado para una persona, un compartimiento con aire acondicionado y equipo, una cantina y un baño. Ala trapezoidal en el plano. Mecanización del ala - a lo largo de todo el borde posterior. Consola de ala plegable. Para reducir la impedancia inductiva, se instalaron aletas finales. Triciclo chasis, con puntal de morro, retráctil. El combustible se coloca en los tanques de cajones en el estabilizador y la raíz del ala.
Inicialmente, se suponía que el Yak-44E debía instalar un motor combinado, que consistía en dos motores turbohélices de crucero ubicados debajo del ala y cuatro motores de turborreactores ubicados en el fuselaje. Los motores de elevación se deben usar solo durante el despegue y el aterrizaje para reducir la velocidad del Yak-44E desde la cubierta del portaaviones y el acercamiento de la aeronave a tierra.
Durante el despegue del Yak-44 con este motor desde un trampolín, la longitud estimada del despegue fue de aproximadamente 150-200 metros, la velocidad de crucero estimada - 450 km / h, la duración del patrullaje - 5 horas. El RTC del avión detectó aviones enemigos a una distancia de 150 a 200 km desde el portaaviones y les apuntó a los combatientes. La detección de objetivos de superficie se realizó a una distancia de más de 300 km. La tripulación de la aeronave - tres personas.
Sin embargo, la colocación en el fuselaje de los motores de elevación Yak-44E 4-x y las importantes reservas de combustible dificultaron la disposición de los sistemas RTK de la aeronave.
En la versión final (proyecto 1984 del año), el Yak-44E se equipó con dos motores de turbopropulsores D-27 desarrollados por Zaporozhye Machine-Building Design Bureau Progress. Según sus características, el motor D-27 no tiene análogos en la industria global de la construcción de motores de avión. El uso de estos motores con una mayor carga en el modo de despegue, así como teniendo en cuenta el flujo de aire del ala, hizo posible proporcionar un trampolín Yak-44E desde los portaaviones. Ambos elementos clave del motor que determinan el alto nivel tecnológico, la caja de cambios y el controlador del ventilador, son de fabricación rusa.
La elección de este motor para el avión Yak-44E se debió al hecho de que a altas velocidades de crucero subsónicas tiene una mejor eficiencia, en comparación con los motores modernos de doble motor turborreactor. Además, en el modo de despegue, el D-27 proporciona la mejor relación empuje-peso y características de tracción. El peso de la aeronave fue suficiente para el despegue de la aeronave desde el trampolín del crucero almirante Kuznetsov que transportaba la aeronave y el aumento de la fuerza de sustentación del ala debido al soplo de su superficie.
Estas cualidades también son importantes porque se suponía que el Yak-44E debía crear una familia de aviones basados en aeródromos y plataformas con varias velocidades de crucero. En toda la gama de estas velocidades, el D-27 tiene ventajas sobre los motores turbojet de derivación y turbohélice.
La potencia de despegue de los motores D-27 fue HP 13880. cada uno (según otros datos - en 14000 hp), y crucero - en 6750 hp todo el mundo La longitud del motor era igual a 4198 milímetros. Peso sin ventilador - 1650 kg. El diámetro del controlador del ventilador fue 4,5 m. El número de aspas: 8 y 6. En el modo crucero, el consumo específico de combustible por hora fue de 0.17 kg / hp, y en el modo crucero, de 0,13 a 0,143 kg / hp. a la una en punto
Las pruebas en tierra del motor del turbopropulsor D-27 se llevaron a cabo en 1988, y en 1990, se realizaron una serie de estudios. Para este propósito, se utilizó un laboratorio IL-76LL volador en LII VVS. El motor D-27 está equipado con un compresor de dos etapas, una cámara de combustión de alta temperatura (tiene un campo de temperatura uniforme en la entrada de la turbina), una turbina de tres ejes (tiene un sistema de control activo para las distancias radiales), una caja de cambios diferencial compacta de una etapa con medidor de empuje integrado, un destornillador de dos filas CB-27, un sistema de control electrónico Tipo FADEC. El reductor del motor turbopropano D-27 fue desarrollado por ZMKB Progress, la producción fue llevada a cabo por la empresa de producción de construcción de maquinaria de Moscú Salyut.
El ventilador de tornillo es una hélice supersónica de alta velocidad y alta carga con hojas de sable de gran ancho. La principal ventaja de esta hélice es su alta eficiencia a altas velocidades de vuelo transónicas, que son comparables a la eficiencia. Hélice normal a velocidades medias. El ventilador de tornillo CB-27 está diseñado y fabricado por SKBM (hoy OAO NPP Aerosila). CB-27 de doble hilera, con la dirección de rotación opuesta a las cuchillas, con paletas reversibles, coaxial, automática, equipada con un sistema eléctrico antihielo del carenado y las cuchillas. Para la fabricación de cuchillas se utilizan materiales compuestos. El diseño de las cuchillas de montaje proporciona cuchillas de reemplazo durante la operación. El regulador hidromecánico junto con el regulador electrónico proporcionó el control del ventilador de inclinación, la reorganización y el mantenimiento de la velocidad de rotación en el canal electrónico. La precisión fue de ± 0,5%. Velocidad máxima - 1200 revoluciones por minuto.
Las pruebas del D-27 con un ventilador motorizado, incluido el Yak-44E, se realizaron en un avión: el laboratorio de vuelo Yak-42E-LL con un motor D-236, que es una dimensionalidad reducida del motor D-27. 15 March 1991, el primer vuelo del laboratorio volador.
El complejo del equipo del avión de patrulla de radar Yak-44 incluye un conjunto de sistemas de información y control de información, medios de computación digital, sistemas de indicación y control conectados por múltiples canales de intercambio de información.
Una estación de radar E-700 con un radar de visión circular para la detección de objetivos aéreos a una distancia de 150-200 km y objetivos de superficie: más de 300 km.
El complejo de vuelo y navegación proporciona una determinación automática continua de coordenadas según la información de los sistemas inerciales con corrección según la información de los sistemas radio-técnicos de navegación por satélite, de largo alcance y de corto alcance. PNK proporciona la formación y visualización de información sobre el estado de los sistemas de la aeronave y los parámetros de la planta de energía.
El sistema de control integrado proporcionó el pilotaje automático en los planos vertical y horizontal a lo largo de la ruta programada, así como el aterrizaje automático utilizando señales de medios de aterrizaje, estabilización de los valores establecidos de altura, velocidad, balanceo, rumbo, inclinación.
La estación de radar de meteo-navegación proporciona una indicación de la información sobre las formaciones meteorológicas, así como la emisión de recomendaciones sobre la ruta óptima para su vuelo.
El sistema de monitoreo automatizado a bordo proporciona el control del estado técnico y la operabilidad de los sistemas y equipos durante el vuelo, documentando los resultados del monitoreo con una mayor transmisión de datos a través de los canales de comunicación de telemetría a la estación de las bases técnicas, monitoreando las limitaciones operativas, prediciendo el estado técnico, resolviendo problemas, teniendo en cuenta el equilibrio de equipos y sistemas. .
El sistema de control electro-remoto es un sistema de control analógico-digital complejo para la mecanización de aeronaves y alas, que proporciona vuelos en varias alineaciones de aeronaves asociadas con diversos equipos y opciones de reabastecimiento de combustible.
modificaciones
Yak-44E - aeronave de detección de radar de largo alcance basada en transportista, diseño integrado.
Yak-44PLO - aviones antisubmarinos. Avanproject, creado a más tardar el año 1990. No se realizó diseño técnico. Se supone que crea un barco y las versiones base de la aeronave.
Yak-44E en tierra: una modificación de la aeronave para el radar de alerta temprana y el control para aeródromos. Se suponía que iba a entregar a la Fuerza Aérea de la URSS. El proyecto del avión fue defendido en la caída de 1991. El avión tiene un tiempo de patrullaje significativamente mayor, las características tácticas y técnicas del complejo radio-técnico se han mejorado.
Yak-44 patrol / border - modificación para controlar la frontera. El diseño de este avión en términos de la oficina de diseño se programó para 1994 año.
Transporte Yak-44.
Yak-44 rescate.
Rendimiento de vuelo (datos de vuelo calculados):
Longitud - 20,39 m.
Altura - 5,7 m.
Envergadura - 25,70 m.
Columpio con ala plegada - 12,5 m.
Área del ala - 88 m2.
El diámetro del fuselaje - 2,7 m.
Diámetro de radome radome - 7,3 m.
Peso en vacío - 21200 kg.
Peso máximo de despegue - 30400 kg.
Tipo de motor - motores X-NUMX turbopropfan D-2
Potencia - 2x4700 hp
Diámetro del tornillo - 4,5 m.
Stock de combustible - 10,5 t.
Velocidad máxima - 740 km / h.
Velocidad de crucero - 700 km / h.
Alcance del ferry -> 4000 km.
Velocidad de patrulla - 500-650 km / h.
Altura de la patrulla - 3-11 km.
Velocidad de aterrizaje - 185 km / h.
Techo práctico - 13 km.
Rango de alcance - km.
Área de visualización de azimut - 360 grados.
La altura del área de observación - km.
Rango de detección de objetivo:
- objetivo aéreo con EPR 3 m² - 250 km;
- misil de crucero AGM-84 - 165 km;
- misil de crucero AGM-86 - 220 km.
El número de objetivos acompañados simultáneamente - 150.
El rango de altura para detectar objetivos en el aire es 5-30000 m.
El rango de velocidad de los objetivos detectados es 40-3500 km / h.
El número de objetivos acompañados simultáneamente en el fondo de 1500 - 150.
Tripulación de vuelo - 2 personas.
Equipo de radio - 4 personas.
Basado en materiales:
www.paralay.com
militaryrussia.ru
www.airwar.ru
alternathistory.org.ua
El desarrollo del radar aeronáutico Yak-44E está directamente relacionado con la creación de portaaviones de la URSS, así como con la creciente importancia del soporte de información para las acciones de la aviación naval, especialmente a gran distancia de los aeródromos.
Como saben, en la formación de conceptos para la creación y el uso de portaaviones en la URSS, y más tarde en Rusia, se tomaron decisiones muy controvertidas e inconsistentes que llevaron a decisiones similares durante el desarrollo de la política técnica y el desarrollo de aeronaves para estos buques.
De hecho, la moderna flota de portaaviones rusos consiste en una sola nave y dos docenas de aviones Su-33. Sin embargo, incluso estas fuerzas que forman parte de la agrupación de la nave están indefensas si no hay información oportuna sobre el enemigo de la superficie y el aire, que se proporciona de manera más efectiva solo por la aeronave de la observación y la guía del radar que opera como parte del grupo aéreo del portaaviones.
El problema del soporte de información de las agrupaciones de barcos se resuelve mediante la instalación de ofertas especiales. Complejo de radio en varias plataformas, que se consideran aviones, helicópteros, globos, aviones convertibles, aeronaves, vehículos aéreos no tripulados, así como buques. Actualmente, las plataformas más eficientes son las aeronaves. El proyecto más exitoso en esta área es el avión RLDN Yak-44E, desarrollado por el Design Bureau. Yakovlev. La creación de este avión fue precedida por el trabajo en portaaviones prometedores.
En 1968, simultáneamente con el desarrollo del crucero antisubmarino del proyecto 1143 en el Nevsky Design Bureau, se inició la investigación sobre la aparición de un portaaviones con un avión de despegue por eyección (proyecto 1160).
Inicialmente el armamento aviones de la compañía incluye polivalentes MiG-23A con alas variable de barrido, subsónica ASW aviones P-42, barco de choque supersónica Su-24K con alas de geometría variable, así como la cubierta Ka-252.
Pero en 1972, en el diseño avanzado del portaaviones, se incluyeron varias variantes de barcos del caza de primera línea Su-27. Ahora grupo de aire consistía en 12 Su-29K o Su-27K, 12 Su-28K, exploradores 4 Designadores Su-28KRTS, 6 ASW aviones P-42, aviones 4 P-42 en la realización, vigilancia radar y orientación y helicópteros 8 Defensa antisubmarina Ka-252.
El avión de defensa antisubmarino subsónico P-42 fue desarrollado por OKB. Beriev de acuerdo con la decisión de la URSS Consejo de Ministros de la Comisión de Asuntos Militares Industriales de 5 de junio 1971. P-42 en el esquema general fue repetido en gran medida por el avión de defensa antisubmarino S-3 "Viking" de la Armada de EE. UU. La máquina se llevó a cabo de acuerdo con el esquema de ala alta con un ala de barrido moderado, empenaje trapezoidal clásico con timones y altura, y dos motores D-36 debajo del ala en las góndolas.
El despegue de la aeronave se llevaría a cabo desde la catapulta de la nave, y el diseño del chasis y el fuselaje se calcularon para aterrizar con el frenado por un finalizador de aire. La quilla y la consola de ala P-42 para ahorrar espacio cuando se almacenan en el hangar y en la cubierta de un portaaviones plegado.
Además de la variante principal de la defensa antisubmarina, planeaban desarrollar variantes de los aviones de cubierta de la patrulla de radar, el petrolero, el transporte, la búsqueda y el rescate, etc. El desarrollo del diseño preliminar del P-42 se completó en el año 1972. En 1976, las pruebas de vuelo de un avión prototipo comenzaban.
El primero fue el diseño del avión de defensa antisubmarino P-42, y se pospuso el desarrollo de la variante P-42 del reloj y guía del radar. Pero los combatientes del grupo de aeronaves de la nave del proyecto 1160 no pudieron proporcionar efectivamente la defensa aérea de la unidad naval, que era la tarea principal del portaaviones, ya que no había ninguna aeronave de patrulla de radar para controlar sus operaciones de combate.
En la primavera de 1976, sobre la base del trabajo de desarrollo de NPKB en portaaviones, el gobierno adoptó una resolución para desarrollar en 1976-1977 y crear por el 1985, dos portaaviones atómicos del proyecto 1153. Según el concepto, los datos de la corte no difirieron del proyecto 1160, pero su grupo aéreo se redujo de los aviones 60-70 a 50.
La construcción de los cruceros de aviones pesados 1153 del proyecto 1977 en noviembre se abandonó, y la construcción de los buques 1143 posteriores, a partir del quinto, se decidió tener en cuenta no solo los helicópteros Ka-252 y los VT del tipo Yak-141, sino también el Su-25K y Su- 27K - despegue de aeronaves.
Por primera vez, el Yak-44 se menciona en los términos de referencia para el desarrollo del crucero de transporte de aeronaves pesadas del proyecto 11435 a partir de noviembre 1980 del año como un avión de patrulla de radar, que forma parte del ala del portaaviones. El proyecto 11435 implicó la creación de una nave con un desplazamiento de 55 ths. Tons con un grupo de aviones de aviones 46 (aviones RLDN Yak-44E, MiG-29K, Su-27K, Yak-141 y Ka-27). En el futuro, se negaron a llevar a cabo este TTZ, después de lo cual se creó la aeronave para el ala de avión del portaaviones del proyecto 27 Ulyanovsk. Opción basada en aeródromo prevista para entregar a la fuerza aérea.
En abril, 1981 decidió actualizar el segundo portaaviones pesado en construcción del proyecto 11434 en la dirección de aumentar el grupo aéreo del avión a 40 con la inclusión de los cazas MiG-29K y Su-27K. En la parte delantera de la cubierta de vuelo, se proporcionó la construcción de un trampolín para el despegue de los combatientes.
Foto en la memoria después de probar el funcionamiento del diseño del Yak-44E en TAKR "Tbilisi" Ave. 11435, septiembre 1990 (http://forums.airbase.ru)
El modelo del Yak-44E en la cabina de vuelo del TAKR "Tbilisi" Ave. 11435, septiembre 1990 (http://forums.airbase.ru)
Maqueta de tamaño completo del avión DRLOIU Yak-44E (http://militaryphotos.net)
Para el apoyo informativo de los barcos de agrupación de portaaviones y la gestión de las operaciones de combate de los combatientes, la patrulla de radar y la aeronave de orientación Yak-11434E se incluyeron en el grupo de aeronaves del portaaviones del proyecto 44. El desarrollo de Yak-44E fue dado por la oficina de diseño de Yakovlev en 1979.
Para noviembre de 1979, OKB im. Yakovleva los preparó. propuesta para el diseño de una aeronave basada en la cubierta de un portaaviones o aeródromos terrestres. Consideramos dos opciones para el complejo de radio: el Fakel (el radar estaba ubicado dentro del fuselaje en la popa y la proa) y el E-700 (la antena completa estaba ubicada sobre el fuselaje en el pilón). En marzo de 1980, en una reunión con S. Gorshkov, comandante en jefe de la Marina flota De la Unión Soviética, se tomó la decisión de crear un avión con el complejo de radio Fakel.
Debido a los problemas significativos con la creación del complejo radioeléctrico Fakel en 1983 de marzo, se detuvo el desarrollo de la versión correspondiente del diseño del avión. En octubre, el 1984 del año, en relación con el fallo de la flota de la versión de la cubierta de tiro del avión de control y detección de radar de largo alcance An-71, continuó el trabajo en los motores Yak-44E sin ascensor, equipados con motores de turbopropulsores y la antena de antena A-700 sobre el fuselaje en el pilón. En septiembre, 1988, se preparó un diseño avanzado de la nueva versión del avión. En enero, el 1989 del año adoptó un Decreto del Consejo de Ministros sobre la creación de una aeronave de patrullaje de radar multiusos Yak-44E con el complejo de radio E-700. En junio, se inició el 1989 del año con un diseño detallado. Hicieron un modelo constructivo-tecnológico de tamaño completo y un modelo a escala 1: 5 destinado a estudios de ingeniería de radio. Para probar el motor D-27 creó el laboratorio de aeronaves Yak-42LL. En TsAGI, en el período comprendido entre 1988 y 1991, el año realizó una investigación sobre la dinámica de la plataforma Yak-44RLD y la seguridad durante el despegue con el uso de un trampolín.

El Instituto de Investigación de Vuelo de la Fuerza Aérea en el complejo de pruebas en tierra en Saki (Crimea) realizó con éxito un experimento único para controlar la maniobra de aterrizaje y el aterrizaje de un grupo de aviones que consta de dos MiG-29 y un imitador de An-24 Yak-44E. El avión hizo un acercamiento a un ritmo dado. La protección del borrador del diseño técnico y el diseño del Yak-44 se llevó a cabo en enero del año 1990. En términos de sus características principales, el avión superó significativamente las últimas versiones del Hokai E-2С, el único avión de esta clase con un despegue por expulsión en el mundo.
La construcción de prototipos y la producción en serie adicional fueron planeadas para llevarse a cabo en la planta de aviación de Tashkent. La construcción del primer patrón de vuelo se inició en el año 1990. La cabina y la parte media del fuselaje se fabricaron en la planta piloto del OKB Design Bureau. Yakovlev, que fabrica el carenado de la antena, fue contratado en conjunto con el Ulyanovsk APO, el ala - en Ulan-Ude. 1990 se decidió a trabajar en el almacenamiento y transporte del Yak-44E en portaaviones utilizando un modelo simplificado de peso y tamaño. El diseño debería haber sido construido sobre la base de 1990, protegido en enero, de un diseño constructivo-tecnológico. En agosto, el 1990 del año, la Oficina de Diseño completó la revisión del diseño. El modelo se desmontó y se transportó a Sebastopol, donde se volvió a montar a bordo del crucero pesado que transportaba aviones "Tbilisi". La evaluación de las características del Yak-44E a bordo del crucero se llevó a cabo en poco tiempo, durante la primera mitad de septiembre 1990. En el curso de estos trabajos, se verificaron las posibilidades de amarrar y remolcar el avión en el hangar y en la cabina de vuelo, rodar sobre la plataforma y subir a la plataforma, descender al hangar, instalar en un lugar regular, emparejar el vehículo con puestos de soporte técnico en la cubierta y en el hangar. Al final del trabajo, el modelo de la aeronave se trasladó nuevamente a la Oficina de Diseño de Yakovlev en Moscú.
En el año 1992, después del colapso de la Unión Soviética, la financiación del trabajo en el avión Yak-44E se detuvo en la etapa de construcción de prototipos para pruebas. Anticipándose al MAKS-1995, se suponía que se mostraría el Yak-44E, pero el Ministerio de Defensa prohibió el espectáculo.
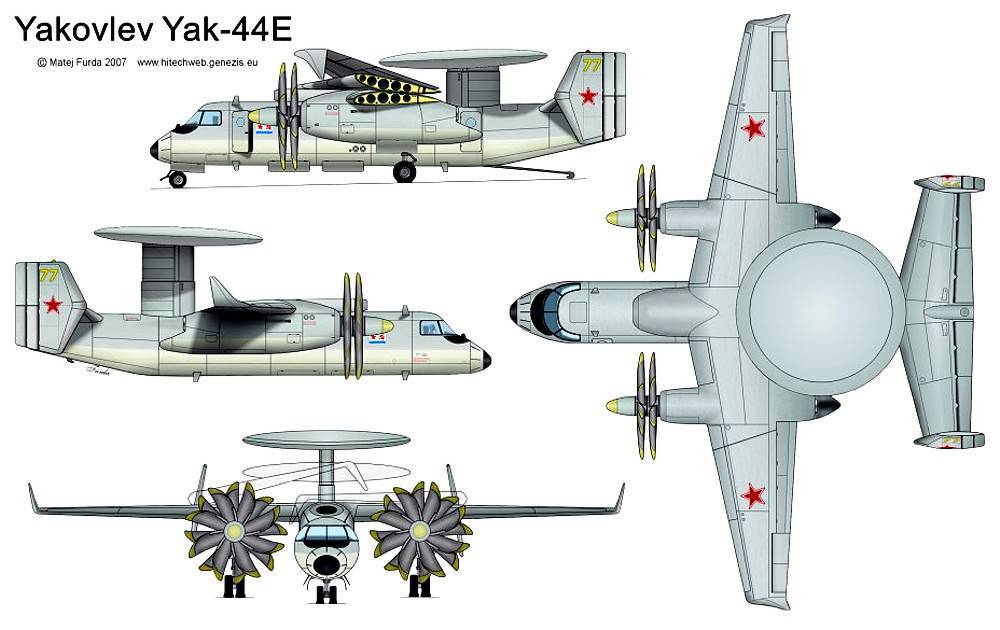
El avión de patrulla de radar Yak-44 se construye de acuerdo con la configuración aerodinámica normal. En la versión de cubierta, el avión tenía una torre de antena de radar plegable y alas plegables. Doble cola El fuselaje tiene una sección circular semi-monocócica. El fuselaje está equipado con una cabina de trabajo para operadores, un compartimento de descanso diseñado para una persona, un compartimiento con aire acondicionado y equipo, una cantina y un baño. Ala trapezoidal en el plano. Mecanización del ala - a lo largo de todo el borde posterior. Consola de ala plegable. Para reducir la impedancia inductiva, se instalaron aletas finales. Triciclo chasis, con puntal de morro, retráctil. El combustible se coloca en los tanques de cajones en el estabilizador y la raíz del ala.
Inicialmente, se suponía que el Yak-44E debía instalar un motor combinado, que consistía en dos motores turbohélices de crucero ubicados debajo del ala y cuatro motores de turborreactores ubicados en el fuselaje. Los motores de elevación se deben usar solo durante el despegue y el aterrizaje para reducir la velocidad del Yak-44E desde la cubierta del portaaviones y el acercamiento de la aeronave a tierra.
Durante el despegue del Yak-44 con este motor desde un trampolín, la longitud estimada del despegue fue de aproximadamente 150-200 metros, la velocidad de crucero estimada - 450 km / h, la duración del patrullaje - 5 horas. El RTC del avión detectó aviones enemigos a una distancia de 150 a 200 km desde el portaaviones y les apuntó a los combatientes. La detección de objetivos de superficie se realizó a una distancia de más de 300 km. La tripulación de la aeronave - tres personas.
Sin embargo, la colocación en el fuselaje de los motores de elevación Yak-44E 4-x y las importantes reservas de combustible dificultaron la disposición de los sistemas RTK de la aeronave.
En la versión final (proyecto 1984 del año), el Yak-44E se equipó con dos motores de turbopropulsores D-27 desarrollados por Zaporozhye Machine-Building Design Bureau Progress. Según sus características, el motor D-27 no tiene análogos en la industria global de la construcción de motores de avión. El uso de estos motores con una mayor carga en el modo de despegue, así como teniendo en cuenta el flujo de aire del ala, hizo posible proporcionar un trampolín Yak-44E desde los portaaviones. Ambos elementos clave del motor que determinan el alto nivel tecnológico, la caja de cambios y el controlador del ventilador, son de fabricación rusa.
La elección de este motor para el avión Yak-44E se debió al hecho de que a altas velocidades de crucero subsónicas tiene una mejor eficiencia, en comparación con los motores modernos de doble motor turborreactor. Además, en el modo de despegue, el D-27 proporciona la mejor relación empuje-peso y características de tracción. El peso de la aeronave fue suficiente para el despegue de la aeronave desde el trampolín del crucero almirante Kuznetsov que transportaba la aeronave y el aumento de la fuerza de sustentación del ala debido al soplo de su superficie.
Estas cualidades también son importantes porque se suponía que el Yak-44E debía crear una familia de aviones basados en aeródromos y plataformas con varias velocidades de crucero. En toda la gama de estas velocidades, el D-27 tiene ventajas sobre los motores turbojet de derivación y turbohélice.
La potencia de despegue de los motores D-27 fue HP 13880. cada uno (según otros datos - en 14000 hp), y crucero - en 6750 hp todo el mundo La longitud del motor era igual a 4198 milímetros. Peso sin ventilador - 1650 kg. El diámetro del controlador del ventilador fue 4,5 m. El número de aspas: 8 y 6. En el modo crucero, el consumo específico de combustible por hora fue de 0.17 kg / hp, y en el modo crucero, de 0,13 a 0,143 kg / hp. a la una en punto
Las pruebas en tierra del motor del turbopropulsor D-27 se llevaron a cabo en 1988, y en 1990, se realizaron una serie de estudios. Para este propósito, se utilizó un laboratorio IL-76LL volador en LII VVS. El motor D-27 está equipado con un compresor de dos etapas, una cámara de combustión de alta temperatura (tiene un campo de temperatura uniforme en la entrada de la turbina), una turbina de tres ejes (tiene un sistema de control activo para las distancias radiales), una caja de cambios diferencial compacta de una etapa con medidor de empuje integrado, un destornillador de dos filas CB-27, un sistema de control electrónico Tipo FADEC. El reductor del motor turbopropano D-27 fue desarrollado por ZMKB Progress, la producción fue llevada a cabo por la empresa de producción de construcción de maquinaria de Moscú Salyut.
El ventilador de tornillo es una hélice supersónica de alta velocidad y alta carga con hojas de sable de gran ancho. La principal ventaja de esta hélice es su alta eficiencia a altas velocidades de vuelo transónicas, que son comparables a la eficiencia. Hélice normal a velocidades medias. El ventilador de tornillo CB-27 está diseñado y fabricado por SKBM (hoy OAO NPP Aerosila). CB-27 de doble hilera, con la dirección de rotación opuesta a las cuchillas, con paletas reversibles, coaxial, automática, equipada con un sistema eléctrico antihielo del carenado y las cuchillas. Para la fabricación de cuchillas se utilizan materiales compuestos. El diseño de las cuchillas de montaje proporciona cuchillas de reemplazo durante la operación. El regulador hidromecánico junto con el regulador electrónico proporcionó el control del ventilador de inclinación, la reorganización y el mantenimiento de la velocidad de rotación en el canal electrónico. La precisión fue de ± 0,5%. Velocidad máxima - 1200 revoluciones por minuto.
Las pruebas del D-27 con un ventilador motorizado, incluido el Yak-44E, se realizaron en un avión: el laboratorio de vuelo Yak-42E-LL con un motor D-236, que es una dimensionalidad reducida del motor D-27. 15 March 1991, el primer vuelo del laboratorio volador.
El complejo del equipo del avión de patrulla de radar Yak-44 incluye un conjunto de sistemas de información y control de información, medios de computación digital, sistemas de indicación y control conectados por múltiples canales de intercambio de información.
Una estación de radar E-700 con un radar de visión circular para la detección de objetivos aéreos a una distancia de 150-200 km y objetivos de superficie: más de 300 km.
El complejo de vuelo y navegación proporciona una determinación automática continua de coordenadas según la información de los sistemas inerciales con corrección según la información de los sistemas radio-técnicos de navegación por satélite, de largo alcance y de corto alcance. PNK proporciona la formación y visualización de información sobre el estado de los sistemas de la aeronave y los parámetros de la planta de energía.
El sistema de control integrado proporcionó el pilotaje automático en los planos vertical y horizontal a lo largo de la ruta programada, así como el aterrizaje automático utilizando señales de medios de aterrizaje, estabilización de los valores establecidos de altura, velocidad, balanceo, rumbo, inclinación.
La estación de radar de meteo-navegación proporciona una indicación de la información sobre las formaciones meteorológicas, así como la emisión de recomendaciones sobre la ruta óptima para su vuelo.
El sistema de monitoreo automatizado a bordo proporciona el control del estado técnico y la operabilidad de los sistemas y equipos durante el vuelo, documentando los resultados del monitoreo con una mayor transmisión de datos a través de los canales de comunicación de telemetría a la estación de las bases técnicas, monitoreando las limitaciones operativas, prediciendo el estado técnico, resolviendo problemas, teniendo en cuenta el equilibrio de equipos y sistemas. .
El sistema de control electro-remoto es un sistema de control analógico-digital complejo para la mecanización de aeronaves y alas, que proporciona vuelos en varias alineaciones de aeronaves asociadas con diversos equipos y opciones de reabastecimiento de combustible.
modificaciones
Yak-44E - aeronave de detección de radar de largo alcance basada en transportista, diseño integrado.
Yak-44PLO - aviones antisubmarinos. Avanproject, creado a más tardar el año 1990. No se realizó diseño técnico. Se supone que crea un barco y las versiones base de la aeronave.
Yak-44E en tierra: una modificación de la aeronave para el radar de alerta temprana y el control para aeródromos. Se suponía que iba a entregar a la Fuerza Aérea de la URSS. El proyecto del avión fue defendido en la caída de 1991. El avión tiene un tiempo de patrullaje significativamente mayor, las características tácticas y técnicas del complejo radio-técnico se han mejorado.
Yak-44 patrol / border - modificación para controlar la frontera. El diseño de este avión en términos de la oficina de diseño se programó para 1994 año.
Transporte Yak-44.
Yak-44 rescate.
Rendimiento de vuelo (datos de vuelo calculados):
Longitud - 20,39 m.
Altura - 5,7 m.
Envergadura - 25,70 m.
Columpio con ala plegada - 12,5 m.
Área del ala - 88 m2.
El diámetro del fuselaje - 2,7 m.
Diámetro de radome radome - 7,3 m.
Peso en vacío - 21200 kg.
Peso máximo de despegue - 30400 kg.
Tipo de motor - motores X-NUMX turbopropfan D-2
Potencia - 2x4700 hp
Diámetro del tornillo - 4,5 m.
Stock de combustible - 10,5 t.
Velocidad máxima - 740 km / h.
Velocidad de crucero - 700 km / h.
Alcance del ferry -> 4000 km.
Velocidad de patrulla - 500-650 km / h.
Altura de la patrulla - 3-11 km.
Velocidad de aterrizaje - 185 km / h.
Techo práctico - 13 km.
Rango de alcance - km.
Área de visualización de azimut - 360 grados.
La altura del área de observación - km.
Rango de detección de objetivo:
- objetivo aéreo con EPR 3 m² - 250 km;
- misil de crucero AGM-84 - 165 km;
- misil de crucero AGM-86 - 220 km.
El número de objetivos acompañados simultáneamente - 150.
El rango de altura para detectar objetivos en el aire es 5-30000 m.
El rango de velocidad de los objetivos detectados es 40-3500 km / h.
El número de objetivos acompañados simultáneamente en el fondo de 1500 - 150.
Tripulación de vuelo - 2 personas.
Equipo de radio - 4 personas.
Basado en materiales:
www.paralay.com
militaryrussia.ru
www.airwar.ru
alternathistory.org.ua
información