Gran salto en la robotización.

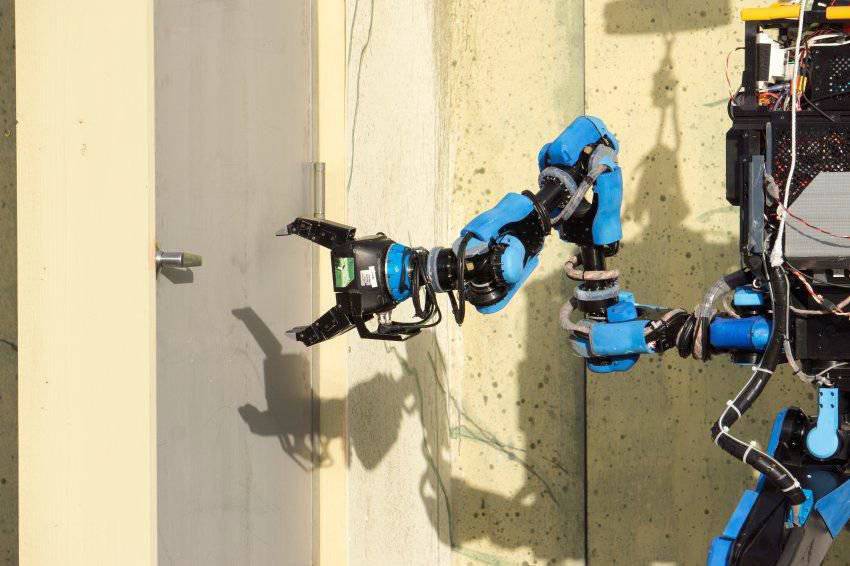
CHIMP realiza una de las tareas más difíciles: intentar conectar una manguera contra incendios a un hidrante
La competencia robots The Robotics Challenge, dirigido por la Agencia de Proyectos de Investigación Avanzada de Defensa DARPA, promete revolucionar lo que pueden hacer los sistemas y cómo están diseñados. Miremos este evento y evaluemos la opinión de varios jugadores clave.
11 Marzo 2011 en Japón fue un poderoso terremoto con un epicentro a aproximadamente 70 km de la costa este de la isla de Honshu. Como resultado de un terremoto con una potencia de puntos 9, se formaron olas que alcanzaron una altura de metros 40 y se extendieron hacia el interior en km 10.
La planta de energía nuclear Fukushima I se interpuso en el camino de un devastador tsunami. Se produjo una catastrófica destrucción de reactores por el impacto de olas gigantes en la estación. Este incidente fue la peor tragedia nuclear desde el accidente de Chernobyl en 1986. Este evento formó la base del escenario, quizás uno de los programas más importantes para los robots de hoy: DRC (DARPA Robotics Challenge, pruebas prácticas de sistemas robóticos bajo el programa de la Oficina de Investigación y Desarrollo Avanzados del Departamento de Defensa de los EE. UU.).
Las pruebas de DRC se anunciaron en abril 2012 y se seleccionó la asistencia en caso de desastres como escenario de prueba. El desarrollo de nuevos sistemas fue necesario en este escenario, principalmente debido al hecho de que era parte de las misiones clave de 10 del Departamento de Defensa de los Estados Unidos identificadas por la Casa Blanca y el Secretario de Defensa en enero de 2012. En diciembre, el 2013 del año, como parte de estas competiciones, pasó por una etapa importante, cuando las primeras pruebas "a gran escala" se realizaron por primera vez en Florida.
Los DRC se distinguen por varios aspectos innovadores, combinan pruebas virtuales y de campo, están abiertos a equipos financiados y no financiados. Este evento consta de cuatro denominadas secciones o pistas; DARPA brindó apoyo financiero para las dos pistas, la pista A y la pista B, y abrió estas competiciones para todos los recién llegados.
De las cuatro pistas, dos (Track A y Track B) recibieron fondos. Después de un anuncio general y presentación de documentos para la competencia, DARPA seleccionó para la Pista A siete equipos que se encargaron del desarrollo de nuevo hardware y software; En la pista B, los equipos de 11 desarrollaron solo software.
La pista C no está financiada y está abierta a nuevos participantes de todo el mundo; como participantes del Track Track. En sus participantes, en primer lugar, utilizaron el programa de simulación virtual del robot para probar su software. La pista D está dirigida a participantes extranjeros que deseen desarrollar hardware y software, pero sin financiamiento DARPA en ninguna etapa.
La clave para el enfoque innovador de DRC fue el componente VRC (Virtual Robotics Challenge - pruebas virtuales de sistemas robóticos). Los equipos que hayan tomado los mejores lugares en él, ya sean de la pista B o C, recibirán fondos de DARPA y utilizarán el robot Atlas de Boston Dynamics, con el que participarán en las pruebas de campo.
En mayo, 2013, los equipos de la pista B y la pista C, solicitaron el VRC, que se llevó a cabo el próximo mes. De los equipos registrados más de 100, solo 26 continuó con el VRC y todo el equipo de 7 se acercó a las pruebas a gran escala.
Los VRC se mantuvieron en un espacio virtual de alta precisión, con licencia de Apache 2 Open Source Foundation. Los equipos recibieron la tarea de completar tres de las ocho tareas que se identificaron para robots reales en las primeras pruebas de campo.
Prueba
Si bien las capacidades de los robots demostrados en el VRC eran impresionantes, no había una certeza del cien por cien en la forma en que se comportarían en las pruebas de campo; sin embargo, la directora del programa de DRC, Jill Pratt, dijo que estaba muy satisfecho con sus capacidades. “Esperábamos que, dado que era la primera parte física de las pruebas, pudiéramos ver muchos fallos de hardware, pero en realidad no fue así, todo el hardware era muy confiable. "Los primeros equipos, especialmente los primeros tres, lograron obtener más de la mitad de los puntos y lograron un progreso significativo incluso cuando interferimos intencionalmente en el canal de comunicación".
Pratt también quedó impresionado con las capacidades del robot Atlas. "Realmente superó nuestras expectativas ... Boston Dynamics hizo un gran trabajo para que ninguno de los equipos sufra fallos de hardware".
Sin embargo, todavía hay margen de mejora, estos son brazos con espacio de trabajo limitado y fugas del sistema hidráulico del robot. El proceso de modernización comenzó incluso antes del evento 2013 de diciembre. Pratt dijo que también le gustaría aumentar la cantidad de instrumentos diferentes en las finales y que los robots probablemente tendrán un cinturón con instrumentos de los cuales deberán seleccionar los instrumentos correctos durante la ejecución del script y cambiarlos.
El robot Atlas también fue elogiado por Doug Steven, investigador e ingeniero de software del Instituto de Capacidades y Máquinas Cognitivas Humanas de la Florida, cuyo equipo en la Pista B ocupó el segundo lugar en pruebas de campo. "Este es un robot bastante maravilloso ... trabajamos con él durante 200 horas de tiempo puro durante dos o tres meses, y esto es muy inusual para una plataforma experimental: la capacidad de trabajar constantemente y no de romper".
Detrás de las impresionantes capacidades de los robots en la República Democrática del Congo hay esfuerzos literalmente heroicos; Las tareas están diseñadas para ser particularmente difíciles y para probar las piezas de hardware y software desarrolladas por los equipos.
Aunque las tareas eran difíciles, Pratt no creía que DARPA hubiera exagerado el listón demasiado alto, y señaló que al menos uno de los equipos había completado cada tarea. Las tareas más difíciles fueron la conducción y la conexión de mangueras. Según Stephen, el primero fue el más difícil: "Definitivamente diría, la tarea de conducir un automóvil, y ni siquiera debido a la conducción en sí. Si desea obtener una conducción completamente autónoma, lo cual es muy difícil, siempre tiene un operador de robot. Conducir no fue tan difícil, pero salir del auto es mucho más difícil de lo que la gente puede imaginar; Es como resolver un gran rompecabezas tridimensional ".
De acuerdo con el formato de las finales de DRC, que debe pasar en 2014 en diciembre, todas las tareas se combinarán en un escenario continuo. Todo esto para hacerlo más confiable y brindar a los equipos una opción estratégica sobre cómo llevarlo a cabo. La dificultad también aumentará, y Pratt agregó: "Nuestra tarea para los equipos que se han desempeñado bien en Homstead es hacerlo aún más difícil. Vamos a quitar los cables conectados, a los cables de comunicación y reemplazarlos con un canal inalámbrico, mientras que vamos a degradar la calidad de la comunicación para que sea peor que en las pruebas anteriores ".
"Mi plan en este momento es hacer que la conexión sea intermitente, a veces tendrá que desaparecer por completo, y creo que esto debe hacerse en un orden aleatorio, como sucede en los desastres reales. Veremos qué pueden hacer los robots en unos segundos, o quizás hasta un minuto, tratando de hacer algunas subtareas por su cuenta, incluso si no están completamente aislados del control del operador y creo que será un espectáculo muy interesante ".
Pratt dijo que los sistemas de seguridad también se eliminarán en las finales. "Esto significa que el robot tendrá que soportar una caída, también significa que debe elevarse por sí solo y esto será bastante difícil".

El robot Schaft quita los desechos de su camino.
Desafíos y estrategias.
De los ocho equipos durante la prueba, cinco usaron el robot ATLAS, sin embargo, los participantes del ganador del tercer premio de la Pista A: Team Schaft y del ganador del tercer premio del Rescate del Equipo Tartan usaron sus diseños. Tartan Rescue proviene del Centro Nacional de Ingeniería para Robótica de la Carnegie Mellon University (CMU), para realizar pruebas bajo el DRC, este equipo ha desarrollado la plataforma móvil altamente inteligente de CMU (CHIMP). Tony Stentz, de Tartan Rescue, explicó las razones por las que el equipo desarrolló su propio sistema: "Puede ser más seguro usar un robot humanoide ya preparado, pero comprendimos que podríamos crear un mejor diseño para responder a los desastres".
"Sabíamos que teníamos que crear una forma aproximadamente humana, pero no nos gustaba la necesidad de mantener el equilibrio en sus robots humanoides. Cuando los robots de dos patas se mueven, necesitan mantener el equilibrio para no caer y es bastante difícil en una superficie plana, pero cuando se habla de moverse a través de escombros de construcción y atacar objetos que pueden moverse, se vuelve aún más difícil. Por lo tanto, CHIMP es estáticamente estable, descansa sobre una base bastante ancha y en posición vertical rueda sobre un par de orugas en sus patas, para que pueda ir hacia adelante y hacia atrás y girar en su lugar. Se coloca fácilmente para exponer las manos para llevar todo lo que se necesita en la tarea; "Cuando necesita moverse en un terreno más difícil, puede caer en las cuatro extremidades, ya que también ha rastreado hélices en sus manos".
Es inevitable que equipos de diferentes vías enfrenten diferentes problemas en preparación para las pruebas, el Instituto de habilidades cognitivas humanas y máquinas enfocadas en el desarrollo de software, porque este es el problema más difícil: la transición de VRC a tareas a gran escala. Stephen dijo que "cuando nos entregaron el robot Atlas, había dos" modos "en él que podía usar. El primero es un conjunto simple de movimientos provisto por Boston Dynamics, que podría usar para el movimiento y que fue un poco defectuoso. Resultó que la mayoría de los equipos utilizaron estos modos incorporados de Boston Dynamics durante la competencia en Homestead, muy pocos equipos escribieron su propio software de control de robot y nadie escribió su propio software para todo el robot ... "
"Escribimos nuestro propio software desde cero y fue un controlador de cuerpo completo, es decir, fue un controlador que funcionó en todas las tareas, nunca cambiamos a otros programas u otro controlador ... Por lo tanto, una de las tareas más difíciles fue crear un código de programa. y ejecútelo en Atlas, ya que era una especie de caja negra cuando Boston Dynamics nos lo presentó, pero es su robot y su IP, por lo que realmente no teníamos acceso a la computadora de a bordo a bajo nivel. Nuestro software se ejecuta en una computadora externa y luego se une a utilizado Yo como API (interfaz de programación de aplicaciones) de la fibra con un ordenador de a bordo, y hay retrasos y problemas de largo con la sincronía aquí ya llegar a ser bastante difícil de controlar un sistema tan complejo como el atlas ».
A pesar de que escribir su propio código desde cero era ciertamente más difícil y lento para el Instituto de habilidades y máquinas cognitivas humanas, Stephen cree que este enfoque es más rentable, ya que los problemas se pueden resolver más rápidamente que confiar en Boston Dynamics. Además, el software Atlas que lo acompaña no era tan avanzado como el software que Boston Dynamics usa en sus propias demostraciones "cuando enviaron el robot ... dijeron abiertamente que los movimientos no son los mismos que se ven cuando Boston Dynamics pone el video en YouTube. Un robot trabajando en el software de esta empresa. Esta es una versión menos avanzada ... esto es suficiente para aprender el robot. No sé si iban a dar el código a los equipos para su uso, creo que no esperaban que todos escribieran su propio software. Es decir, lo que se puso junto con el robot fue posible inicialmente y no estaba destinado a llevar a cabo las ocho tareas en pruebas prácticas de DRC ".
Para el equipo de rescate de Tartan, el mayor desafío fue el apretado calendario que tenía que cumplir al desarrollar una nueva plataforma y software relacionado. “Hace quince meses, CHIMP era solo un concepto, un dibujo en papel, así que tuvimos que desarrollar las partes, hacer los componentes, ensamblarlo todo y probarlo todo. Sabíamos que nos llevaría la mayor parte del tiempo, no podíamos esperar y no comenzar a escribir software hasta que el robot estuviera listo, así que comenzamos a desarrollar software en paralelo. En realidad, no contábamos con un robot de pleno derecho para el trabajo, por lo que utilizamos simuladores y sustitutos de hardware para el desarrollo. Por ejemplo, teníamos un manipulador de brazos separado, que podríamos usar al verificar ciertas cosas para una sola extremidad ", explicó Stentz.
Con respecto a las dificultades que agregaría el deterioro de los canales de transmisión de datos, Stentts observó que esta decisión se tomó desde el principio específicamente para tales situaciones y que este no es un problema muy difícil. “Tenemos sensores montados en la cabeza del robot, los buscadores de rango láser y las cámaras, que nos permiten construir un mapa de texturas 3-D completo y un modelo del entorno que rodea al robot; Esto es lo que utilizamos desde el lado del operador para controlar el robot y podemos imaginar esta situación en diferentes resoluciones dependiendo de la banda de frecuencia y el canal de comunicación disponibles. Podemos centrar nuestra atención y obtener una mayor resolución en algunas áreas y reducirla en otras áreas. "Tenemos la capacidad de controlar el robot de forma remota directamente, pero preferimos un mayor nivel de control cuando definimos objetivos para el robot y este modo de control es más resistente a la pérdida de señal y a los retrasos".
El robot Schaft abre la puerta. Se requerirán capacidades mejoradas de manejo de robots para futuros sistemas.
Próximos pasos
Stentz y Stephen dijeron que sus equipos actualmente están evaluando sus capacidades en las pruebas del mundo real para evaluar qué acciones deben tomarse para avanzar, y que esperan una conclusión de retiro de parte de DARPA e información adicional sobre lo que será en finales Stephen dijo que también esperan recibir una cierta modificación para Atlas, señalando un requisito ya aprobado para la final: el uso de una fuente de alimentación a bordo. Para CHIMP, esto no es un problema, ya que un robot con unidades eléctricas ya puede cargar sus propias baterías.
Stentz y Stephen estuvieron de acuerdo en que hay una serie de problemas que deben resolverse al desarrollar la esfera de los sistemas robóticos y al crear tipos de plataformas que se pueden usar en escenarios de alivio de desastres. “Yo diría que no hay una sola cosa en el mundo que podría ser una panacea. Creo que en términos de hardware, las máquinas que tienen capacidades de manejo más flexibles pueden ser útiles. En cuanto al software, creo que los robots necesitan un mayor nivel de autonomía para que puedan hacerlo mejor en operaciones remotas sin un canal de comunicación; Pueden realizar tareas más rápido, porque hacen muchas cosas por sí mismos y toman más decisiones por unidad de tiempo. Me parece bien noticias "Es que la competencia bajo los auspicios de DARPA está realmente diseñada para promover ambas áreas de hardware y software", dijo Stentz.
Stephen cree que también se necesitan mejoras en el desarrollo de la tecnología. “Como programador, veo muchas formas de mejorar el software y también veo muchas oportunidades para mejorar el proceso de trabajo en estas máquinas. Muchas cosas interesantes suceden en laboratorios y universidades donde puede que no haya una cultura sólida de este proceso, por lo que a veces el trabajo se torna al azar. Además, al ver proyectos realmente interesantes en las pruebas de DRC, te das cuenta de que hay muchas oportunidades para mejorar el hardware y las innovaciones ".
Stephen observó que Atlas es el principal ejemplo de lo que se puede lograr: un sistema funcional desarrollado en poco tiempo.
Para Pratt, sin embargo, el problema está más definido y él cree que el desarrollo de software se debe llevar a cabo primero. “La idea que estoy tratando de transmitir es que la parte principal del software está entre los oídos. Me refiero a lo que está sucediendo en el cerebro del operador, lo que está sucediendo en el cerebro del robot y cómo los dos están de acuerdo entre sí. Queremos insistir en el hardware del robot y todavía tenemos problemas con él, por ejemplo, tenemos problemas con el costo de producción, con la eficiencia de la fuente de alimentación ... Sin duda, la parte más difícil es el software; y este es el código de software para la interfaz humano-robot y el código de software para realizar la tarea de los propios robots, que incluye percepción y conciencia situacional, conciencia de lo que está sucediendo en el mundo y una opción basada en lo que percibe el robot ".
Pratt cree que la búsqueda de aplicaciones comerciales para robots es clave para el desarrollo de sistemas avanzados y el avance de la industria. “Creo que realmente necesitamos aplicaciones comerciales además de la eliminación de desastres y la esfera de defensa general. La verdad es que los mercados, la defensa, la respuesta rápida y el alivio de desastres son muy pequeños en comparación con el mercado comercial ".
"Nos encanta mucho hablar de ello en la administración de DARPA, tomemos los teléfonos celulares como ejemplo. DARPA financió muchos de los desarrollos que llevaron a las tecnologías utilizadas en los teléfonos celulares ... Si fuera solo el mercado de defensa, para el cual estaba destinado el teléfono celular en sí, costarían muchos órdenes de magnitud más de lo que son ahora, gracias al enorme mercado comercial. Permitido obtener una increíble accesibilidad de los celulares ... "
“En el campo de la robótica, nuestra opinión es que necesitamos exactamente esta secuencia de eventos. Necesitamos ver el mundo comercial comprando aplicaciones que harán que los precios bajen, y después de eso podremos crear sistemas específicamente para el ejército, en los que se invertirán inversiones de la esfera comercial ".
Ocho primeros equipos tomarán parte en las pruebas de 2014 de diciembre: Team Schaft, IHMC Robotics, Tartan Rescue, Team MIT, Robosimian, Team TRAClabs, WRECS y Team Trooper. Cada uno recibirá un millón de dólares para mejorar sus decisiones y, en última instancia, el equipo ganador recibirá el premio de 2 millones, aunque para la mayoría el reconocimiento es mucho más valioso que el dinero.

El Robosimian Jet Propulsion Laboratory de la NASA tiene un diseño inusual.
Elemento virtual
La inclusión de dos pistas de DARPA en las pruebas de DRC, en las que solo participan equipos de desarrollo de software, habla del deseo de la administración de abrir los programas al mayor número posible de participantes. Anteriormente, tales programas de desarrollo tecnológico eran la prerrogativa de las empresas de defensa y los laboratorios de investigación. Sin embargo, la creación de un espacio virtual en el que cada equipo puede probar su software permitió a los competidores que no tenían o tenían poca experiencia en el desarrollo de software para robots para competir al mismo nivel que las empresas conocidas en este campo. DARPA también considera el espacio simulado como un legado a largo plazo de las pruebas de DRC.
En 2012, la Autoridad DARPA encargó a Open Source Software Foundation que desarrollara un espacio virtual para la competencia Challenge y esta organización comenzó a crear un modelo abierto utilizando el paquete de software Gazebo. Gazebo es capaz de simular robots, sensores y objetos en un mundo tridimensional, está diseñado para proporcionar datos realistas de los sensores y lo que se describe como "interacciones físicamente plausibles" entre objetos.
El presidente de Open Source Foundation, Brian Gjorki, dijo que Gazebo fue utilizado debido a sus capacidades probadas. “Este paquete se usa ampliamente en la comunidad robótica, por lo que DARPA quería apostar, porque vimos sus ventajas en lo que hace; Podríamos crear una comunidad de desarrolladores y usuarios a su alrededor ".
Aunque Gazebo ya era un sistema bien conocido, Görki señaló que todavía hay margen de mejora, se deben tomar medidas para cumplir con los requisitos establecidos por DARPA. “Hicimos muy poco para simular robots ambulantes, nos centramos principalmente en plataformas con ruedas y hay algunos aspectos de la simulación de robots ambulantes que son bastante diferentes. Debe tener mucho cuidado al hacer la resolución de contacto y cómo modelar el robot. De esta manera usted puede obtener buenos parámetros a cambio de precisión. Se requirió mucho esfuerzo para realizar un modelado detallado de la física del robot, de modo que puede obtener un modelado de buena calidad y obtener un robot que funcione casi en tiempo real, a diferencia de un trabajo que funciona en una décima parte o una centésima parte del tiempo real, lo cual es muy probable si todos Los esfuerzos que pones en ello ".

El robot Atlas simulado se introduce en un automóvil durante una competencia virtual de DRC
Con respecto a la simulación de robot Atlas para el espacio virtual, Gorky dijo que la Fundación debería haber comenzado con un conjunto de datos básicos. “Comenzamos con un modelo proporcionado por Boston Dynamics, no comenzamos con modelos detallados de diseño asistido por computadora, tuvimos un modelo cinemático simplificado que se nos dio. Básicamente, un archivo de texto, en el que está escrito qué tan larga es esta pierna, qué tan grande es, y así sucesivamente. Para nosotros, la dificultad radica en el ajuste correcto y preciso de este modelo para que podamos obtener un compromiso de los parámetros de trabajo a cambio de precisión. Si lo modelas de una manera simplificada, entonces puedes hacer algunas inexactitudes en el motor de física subyacente, lo que lo hará inestable en ciertas situaciones. Por lo tanto, mucho trabajo es cambiar ligeramente el modelo y, en algunos casos, escribir su propio código para simular ciertas partes del sistema. Esta no es solo una simple simulación de física, hay un nivel por debajo del cual no vamos a caer ".
Pratt percibe positivamente lo que se ha logrado con VRC y el espacio simulado. “Hicimos lo que no teníamos antes, creamos modelos tecnológicos realistas desde un punto de vista físico, que se pueden ejecutar en tiempo real para que el operador pueda realizar su trabajo interactivo. Esto es realmente necesario para usted, porque estamos hablando de un hombre y un robot como equipo, por lo que la simulación del robot debería funcionar en el mismo período de tiempo que el hombre, lo que significa en tiempo real. Aquí, a su vez, se necesita un compromiso entre la precisión del modelo y su estabilidad ... Creo que hemos logrado mucho en la competencia virtual ".
Stephen explicó que cuando desarrollaba software, el Instituto de habilidades cognitivas humanas y las máquinas IHMC enfrentaban varios desafíos. "Utilizamos nuestras propias condiciones de modelado, que integramos con Gazebo como parte de una competencia virtual, pero gran parte de nuestro desarrollo se realizó en nuestra plataforma llamada Simulation Construction Set ... utilizamos nuestro software cuando ejecutamos un robot real, trabajamos mucho en modelado y esta es una de nuestras piedras angulares, confiamos de muchas maneras en una buena experiencia de desarrollo de software ".
Stephen dijo que en IHMC prefieren usar el lenguaje de programación Java, ya que tiene "un complejo de herramientas realmente impresionante que ha crecido a su alrededor". Señaló que al combinar Gazebo y su propio software, “el problema principal es que escribimos nuestro software en Java y la mayoría del software para robots utiliza lenguajes C o C ++, que son muy buenos para sistemas integrados. Pero queremos hacer el trabajo en Java de la manera que lo deseamos, hacer que nuestro código funcione en un período de tiempo determinado, tal como se implementa en C o C ++, pero nadie lo utiliza, excepto nosotros. Este es un gran problema para que todos los programas de Gazebo funcionen con nuestro código Java ".
DARPA y la Fundación Open Source continúan desarrollando el modelado y el espacio virtual y lo mejoran. “Estamos empezando a introducir elementos que harán que el simulador sea más útil en una situación diferente, fuera del sitio de rescate de emergencia. Por ejemplo, tomamos el software que se usó en la competencia (llamado CloudSim, porque realiza la simulación en un entorno de computación en "nube") y lo desarrollamos con la intención de usarlo en servidores en la nube ", dijo Gerky.
Una de las principales ventajas de tener un entorno simulado abierto para uso general y trabajar con él en un entorno de nube es que los sistemas más potentes pueden realizar cálculos de alto nivel en los servidores, lo que permite a las personas utilizar sus computadoras livianas e incluso netbooks y tabletas. para trabajar en tu lugar de trabajo. Gerkie también cree que este enfoque será muy útil para la capacitación, así como para el diseño y desarrollo de productos. "Podrás acceder a este entorno de simulación desde cualquier lugar del mundo y probar tu nuevo robot".
Materiales utilizados:
www.janes.com
www.darpa.mil
www.bostondynamics.com
información