Robots de tierra. Desde sistemas de lanzamiento a convoyes no tripulados (parte de 1)
Entre los tres elementos representados por mar, cielo y tierra, la tierra es, por supuesto, el más difícil para un vehículo no tripulado. Mientras que los vehículos aéreos no tripulados (UAV) y los sistemas deshabitados de superficie o submarinos operan en su mayor parte en un espacio homogéneo, los terrestres Robots debe superar todo tipo de obstáculos que son innumerables. No solo complican el movimiento de los robots, sino que también limitan el alcance de sus canales de comunicación.
En el reino de los UAV, la regla es que cuanto más pequeño sea el UAV, mayor será la influencia de las ráfagas de viento en él. Los robots de tierra sufren de este síndrome de tamaño cuando las dimensiones físicas afectan la movilidad, al menos cuando se trata de las soluciones más clásicas, a saber, las ruedas y las orugas, ya que los mecanismos para caminar y gatear aún están lejos de la implementación práctica.
Los mini-robots terrestres son los que más sufren. Su masa limitada también afecta el rango de los canales de comunicación y la duración de su trabajo, ya que generalmente funcionan con baterías.
Siempre es difícil dividir los sistemas en categorías. Sin embargo, la primera categoría puede atribuirse de manera segura a los sistemas que pesan hasta cinco kilogramos, los llamados mini-robots terrestres (si es que aparece, dejemos de lado la microcategoría para el futuro). La primera categoría tiene subcategorías, a saber, robots abandonados de hasta tres kilogramos, ya que los robots más pesados tienen más probabilidades de ser lanzados que de los dispositivos.
El siguiente rango es la categoría media, realmente otro mundo, donde la carga útil se mide en kilogramos en lugar de gramos, y donde se proporciona mucha más flexibilidad funcional. Aquí los propios robots pesan de 5 a 30 kg.
Por razones prácticas, este artículo analiza solo los robots que pueden ser utilizados por los soldados en el campo de batalla desde un punto de vista táctico. Por ejemplo, los robots para la neutralización de objetos explosivos se consideran sistemas especializados diseñados para realizar una gama especial de tareas. El propósito del artículo es analizar lo que está disponible para el soldado ordinario para aumentar su seguridad y las cualidades de lucha de la flexibilidad en una situación real.

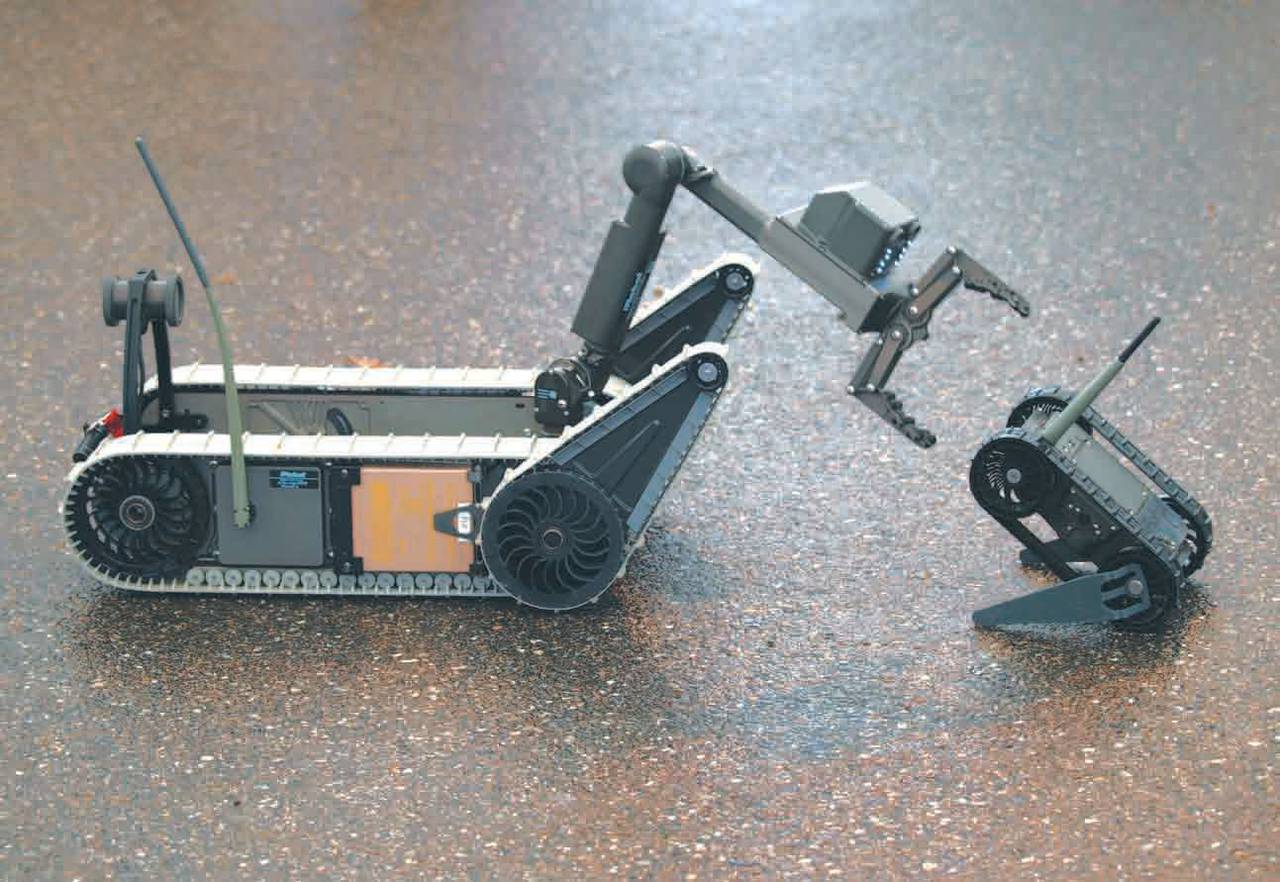
Otra forma de "colaboración" entre los robots terrestres y los UAV está representada aquí por el vehículo rastreado por el HDT Global Protector, desplegando un UAV atado para proporcionar una alerta temprana de convoyes de transporte.
Es obvio que muchos robots terrestres multitarea pueden estar equipados con un manipulador de brazo robótico, asas, cañones de agua, etc., que en realidad los convierte en bombas móviles, aunque esta será solo una de muchas de sus funciones.
Los robots pesados que pesan más de 100 kg pueden ser útiles en el campo de batalla en tareas tales como reconocimiento, reposición de suministros, evacuación de víctimas, etc. Por ejemplo, como una de las muchas aplicaciones posibles, la situación con los autos Supacat, que se utilizan en el ejército británico para traer municiones a la línea del frente, se puede presentar. Los conductores de estos autos corren un riesgo muy alto, por lo que pueden ser reemplazados por sistemas robóticos.

Demostración del diseño modular de los robots Nerva de Nexter, que pueden aceptar sensores químicos, cámaras infrarrojas, granadas de gas lacrimógeno, un sistema de audio, un dispositivo para la destrucción de objetos explosivos, así como un módulo para instalar otros dispositivos.

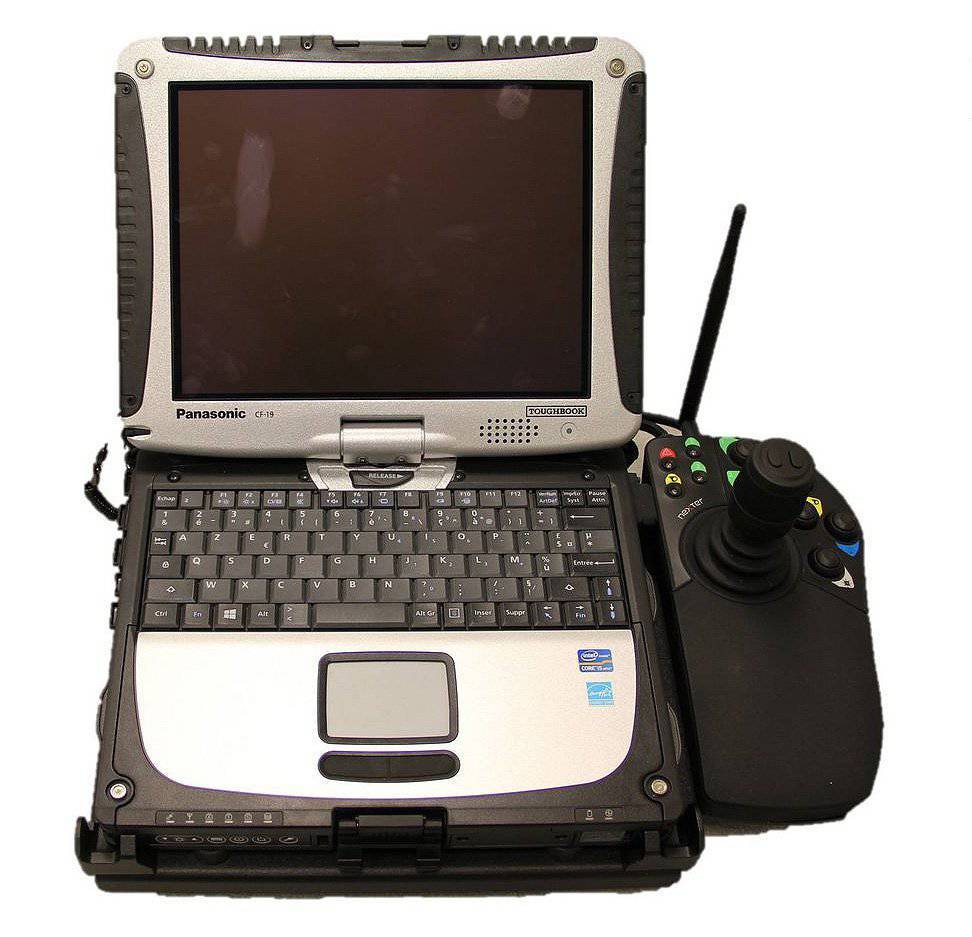
Los mini robots basados en tierra, como iRobot FirstLook (arriba), se mantendrán controlados de forma remota, ya que aumentar su autonomía puede ser demasiado costoso, al menos en esta etapa. Sin embargo, una de las direcciones podría ser la mejora de la interfaz hombre-máquina, que permitirá a los operadores mantener su posición táctica al controlar robots de tierra, como puede verse claramente en el ejemplo del controlador de robot Nexter Nerva (abajo)
La fatiga y la pérdida de concentración fueron identificadas por el ejército estadounidense como las principales causas de accidentes en las columnas de suministro de transporte, además de que las minas terrestres direccionales contribuyen a esta triste estadística. Como resultado, varias compañías en los Estados Unidos y Europa están desarrollando sistemas que permiten transformar un vehículo tradicional en un vehículo no tripulado. También se puede aplicar un enfoque similar al equipo de los ingenieros, es decir, el raspador, por ejemplo, se puede convertir en una herramienta de desminado robótico.
La gran ventaja de estos sistemas es que pueden comprarse en cantidades relativamente pequeñas e instalarse en camiones o automóviles estándar en el sitio y luego transferirse a otras máquinas, ya sea para otras tareas o en caso de un mal funcionamiento de la máquina en la que se instalaron. .
En comparación con los UAV, los robots terrestres, por supuesto, son menos maduros desde el punto de vista tecnológico. En algunos de ellos, se integra una forma desarrollada de autonomía, que podría reducir significativamente la carga de trabajo de los operadores y al mismo tiempo aumentar la ventaja de su uso y convertirlos en un factor real para aumentar la preparación para el combate. Se presentan muchos argumentos en contra de sus armas (esto también se aplica a los UAV), ya que su confiabilidad se considera insuficiente (cuán confiable también puede ser cuestionada una persona, especialmente a la luz de los incidentes entre sus fuerzas en algunas áreas de combate). Los asesores legales recibirán buenos dividendos en el rápido despliegue de dichos robots con base en tierra. Sin embargo, está claro que la era de los robots terrestres ha comenzado y jugarán un papel cada vez más importante en los futuros campos de batalla.
Pero ahora, sin embargo, otro factor tiene un efecto desastroso en el desarrollo de robots terrestres: la crisis financiera. En muchos países liderados por Estados Unidos, se han reducido muchos programas, lo que afecta el desarrollo y la adquisición de algunos de los sistemas mencionados en este artículo. Esto, junto con otros eventos, dio lugar a procesos negativos en la comunidad de robots de tierra. Varias empresas conocidas actualmente están luchando con problemas financieros debido a la cancelación de pedidos.
Tres programas parecen estar vivos en los Estados Unidos hoy en día: Sistema robótico avanzado de eliminación de artefactos explosivos avanzados, una rama robótica común del kit robótico autónomo de luz común, que sirve como medio de transporte de sensores de reconocimiento, y un robot del departamento de ingeniería. Ingeniero Escuadrón Robot. Es probable que otro programa para el transportador multipropósito del equipo de transporte de equipos multiusos de Squad sobreviva a los recortes y al secuestro del presupuesto de defensa.
Todos los sistemas robotizados (aire, mar y tierra), si desean atraer al menos algo de atención del Departamento de Defensa de los EE. UU., Deben cumplir con la arquitectura común para sistemas no tripulados. Arquitectura conjunta para sistemas no tripulados (JAUS) y el perfil de interoperabilidad del perfil de interoperabilidad (PIO). Los sistemas de control montados en la cabeza, la carga de trabajo reducida, el control semiautónomo, la capacidad de operar varios dispositivos simultáneamente, parecen ser las principales tendencias de desarrollo en el campo de los sistemas robóticos.
¿Cómo se ve el futuro de los robots terrestres? ¿Cuántos de ellos aparecerán en el campo de batalla en 2020? Difícil de decir. Es obvio que este desarrollo tecnológico, combinado con la necesidad absoluta de reducir las pérdidas en los contingentes de países occidentales desplegados en puntos críticos, inevitablemente requerirá el avance de sistemas desiertos en todas las ramas del ejército que operan en tierra. Muy pocos a principios de siglo estaban convencidos de la utilidad de los UAV, y ahora aparecen todos los días en las noticiasy muchos se comercializan actualmente para uso comercial. ¿Sucederá esto también con los robots terrestres? La respuesta probablemente sea sí, considerando que, según la Oficina para el Desarrollo de Sistemas Robóticos, los robots terrestres han salvado la vida de más de 800 soldados mientras realizaban misiones de combate en Irak y Afganistán.
El ejército francés mira a los robots terrestres.
El Secretario de Defensa francés en junio, 2014 confirmó la Etapa 1 de Scorpion Stage y el Ejército francés ahora tiene la intención de lanzar la Etapa 2, para la cual los sistemas robóticos son una parte integral. Los robots en las fuerzas tácticas operacionales tendrán que ser utilizados en una batalla desmontada, y los microrobots terrestres (y sus colegas voladores) deben convertirse en los ojos avanzados de un soldado. Otros robots de tamaños similares podrían contribuir, ejerciendo no solo una fuerza sobre las fuerzas terrestres del enemigo, sino también mejorando la calidad de la comunicación para grupos operativos, por ejemplo, mediante el despliegue de sistemas de radioenlaces.
Los microrobots más avanzados podrían realizar tareas de reconocimiento para los niveles más altos, participando en las batallas de las fuerzas mecanizadas. Los robots tácticos universales podrían realizar el reconocimiento de contactos, reponer los suministros y servir como elementos ejecutivos, mientras que los robots más pesados podrían usarse principalmente para tareas de desminado e ingeniería. No se puede descontar el uso de sistemas que pueden transformar vehículos estándar en robots.
Mini Categoría: Nuevas Herramientas de Infantería
Anticipándose a la aparición de nanorobots terrestres, las tareas de reconocimiento de la observación y la recopilación de información a corta distancia se realizan principalmente por robots ligeros terrestres capaces de moverse en áreas restringidas y tener canales de transmisión de datos de un rango limitado. Muchos de ellos pertenecen a la categoría que podemos llamar la categoría de "robots abandonados", ya que el operador puede abandonarlos por una cierta distancia y altura, por ejemplo, dentro del edificio, lo que elimina la necesidad de moverse allí por su cuenta.
A menudo considerados como desechables (consumibles), pueden caber en un bolsillo o bolso y tener dispositivos de control pequeños y livianos, y algunos incluso están controlados incluso por teléfonos inteligentes. Junto con los robots de tiro liviano, hay varios robots más pesados que se pueden caer fácilmente del vehículo (cuando no están equipados con sensores adicionales), pero difícilmente se pueden lanzar a través de la ventana del primer piso. Siguen siendo los sistemas preferidos para las principales unidades de infantería, ya que no aumentan en gran medida la carga del soldado y lo compensan al proporcionarle nuevas capacidades fáciles de usar.

El miembro más joven de la familia iRobot frente a un dispositivo explosivo improvisado. Las dos palancas trapezoidales en los lados en el primer plano se llaman aletas.


Throwbot XT es uno de los dos ReconRobotics más vendidos; segundo y mayor modelo - Reconscout XL
Arrojado
ReconRobótica: ReconRobotics, con sede en Minnesota, se creó en el año 2006, es una de las empresas de más rápido crecimiento en el campo de los sistemas robóticos terrestres. Los sistemas de producción de 4000 de esta empresa funcionan en el mundo, divididos en partes iguales entre las esferas militar y policial. Los recortes presupuestarios de la defensa de los EE. UU. Golpearon duramente a la compañía en el año 2014 después de que el Ejército de los EE. UU. Decidió no comprar más de mil robots en el año 2013. Esto dio lugar a una suspensión de la producción al comienzo de 2014, aunque la compañía informó recientemente que un mercado internacional sólido y un mercado de aplicación de la ley ayudaría a compensar la pérdida de órdenes del ejército de EE. UU. Actualmente, 90% de las ventas de la compañía se basan en dos modelos: Throwbot XT y Reconscout XL.
El sistema más ligero Throwbot XT de la familia de robots ReconRobotics pesa solo 540 gramos (la granada de mano promedio pesa de 400 a 500 gramos), su producción comenzó en medio de 2012. La comparación con la granada se mejora aún más, ya que para activar y activar el robot, el operador debe quitarle el cheque. El diseño ligero y tubular le permite agarrarlo cómodamente y tirarlo a una distancia, como dicen en la empresa, hasta medidores 36. Las buenas características de resistencia al choque del robot le permiten lanzarlo desde una altura de medidores 9 sin ninguna consecuencia. Dentro del tubo hay dos motores eléctricos sin escobillas que giran las ruedas en los extremos del tubo, mientras que la cola trasera proporciona equilibrio y orientación. Cada rueda con un diámetro exterior de 114 mm tiene ocho cuchillas curvas que maximizan la permeabilidad de los obstáculos. Además de los sensores, la carcasa tubular también contiene una batería que garantiza un tiempo de operación de una hora en una superficie plana.
El sensor principal es una cámara en blanco y negro para condiciones de poca luz con ópticas, que proporciona un campo de visión de 60 ° y una velocidad de fotogramas de 30 fotogramas por minuto; cuando la luz cae por debajo de cierto nivel, la fuente de iluminación infrarroja se activa automáticamente, lo que garantiza una visibilidad de más de 7,5 metros. Un micrófono omnidireccional altamente sensible permite al operador escuchar ruidos o conversaciones. La firma acústica del robot Throwbot XT es muy baja, en ReconRobotics declaran un ruido de 22 dB a una distancia de seis metros, lo que corresponde a la respiración de una persona a una distancia de 20 centímetros. Para el despliegue silencioso del robot, hay un pequeño gancho al final de la cola para asegurar el cable, mientras que ReconRobotics desarrolló SearchStick para entregarlo a una altura. Esta es una barra telescópica de aluminio con una longitud del medidor 1,83 con un botón de cierre activado (en la posición plegada, la longitud de la barra de todo el medidor 0,52); También sirve para devolver el robot al final del trabajo o usarlo como una extensión de cámara. El canal de datos del Throwbot XT se puede sintonizar a tres frecuencias diferentes, por lo que un operador puede controlar tres robots. La velocidad del dispositivo está limitada a 1,6 km / h, que es suficiente para un sistema diseñado principalmente para trabajos en edificios o en áreas urbanas. En entornos urbanos, la gama es de medidores 30, que se triplica en áreas abiertas.


Un ejemplo vívido de para qué se puede usar un robot abandonado: tirar a la siguiente habitación y ver qué sucede allí.
ReconScout IR es un desarrollo directo del robot anterior. Está equipado con una cámara CCD infrarroja en blanco y negro con un campo de visión 60 ° y una iluminación infrarroja que es efectiva a una distancia de más de siete metros.
ReconScout XL desarrolla velocidades de hasta 2,16 km / h, que es más alta que la de Throwbot, pero su resistencia al impacto es menor, ya que puede soportar una caída desde la altura de todo el medidor 4,6 y un tiro al medidor 9,1. Sus ruedas con un diámetro de 140 mm tienen seis púas; Este robot es algo más ruidoso que el anterior, creando un ruido de 32 dB en el trabajo a una distancia de seis metros. Los sensores y el canal de comunicación se mantienen sin cambios.
Los sistemas ReconRobotic son controlados por la unidad de control Operator Control Unit II (OCUII), que le permite ver imágenes capturadas por la cámara del robot en una pantalla de pulgadas 3,5, mientras que todos los sonidos circundantes se incorporan a los auriculares. OCU II pesa 730 gramos, tiene un joystick para el pulgar instalado, lo que facilita el control del movimiento del robot. Las dos antenas deben extenderse antes de la operación de la OCU II, hay seis frecuencias disponibles, la altura del dispositivo con las antenas extendidas es 510 mm.
Históricamente, el principal mercado para ReconRobotics fue Estados Unidos con miles de sistemas vendidos, sin embargo, sus robots también se vendieron a varios países más. En Europa, sus sistemas abandonados operan en Dinamarca, Francia, Italia, Noruega, Suiza y el Reino Unido, además, los robots de la compañía se operan en Australia, así como en Egipto y Jordania. En 2013, los robots de ReconRobotics fueron llevados por el Departamento de Equipamiento de Soldados de PEO al Programa de Mejora de Soldados como parte de los conjuntos sensoriales de nivel de separación. El proceso de evaluación debe ser completado por el año 2015. ReconRobotics está trabajando actualmente en el desarrollo técnico de una versión digital del Throwbot XT; Esto agregará la capacidad de reconfigurar el canal de radio, lo que se convierte en una condición indispensable en el mercado internacional.
Nexter: En 2012, la compañía francesa Nexter reveló su interés en los mini robots basados en tierra, lanzando un prototipo de un robot Nerva 4x4 abandonado que pesa 4 kg. Después de un mayor desarrollo e implementación del proceso de producción, el robot Nerva original recibió la designación Nerva LG, el primero de la familia de robots ligeros, cuyo desarrollo fue iniciado por la recién creada división Nexter Robotics. Si el equipo no está instalado encima del robot, el Nerva LG es completamente reversible, en otras palabras, está listo para funcionar justo después del lanzamiento. El asa montada en la parte trasera hace que sea fácil de transportar y tirar. Puede dejarse caer desde una altura de tres metros y lanzarse a un lado durante siete metros. Nerva LG tiene dos rangos de velocidad: de cero a 4 km / hy el segundo de 0 a 15 km / h. El primer modo es estándar, permite realizar un control y orientación precisos, y cuando se necesita una alta velocidad, el operador presiona un botón en el extremo del joystick, cambiando el dispositivo al modo de velocidad. Las ruedas estándar tienen un diámetro de 150 mm, aunque se pueden instalar ruedas especiales para arena con peldaños más anchos y pinzas transversales, también está disponible un conjunto de pistas en tiempos difíciles. Para fuerzas especiales hay un set para nadar con elementos de flotadores y ruedas de paletas.

Para sus robots Nerva, Nexter ha creado módulos de cambio rápido que le permiten establecer una nueva tarea para el sistema sin demora.
Robot completamente modular basado en el concepto de "un clic", que le permite reemplazar rápidamente las ruedas y la batería. Nerva LG está equipada con sensores estándar, que a expensas de cuatro cámaras proporcionan una vista circular (la cámara frontal con alta resolución tiene un sistema de retroiluminación), el operador escucha todos los sonidos gracias a un micrófono omnidireccional. Los rieles de Picatinny o las correas configurables proporcionan una interfaz mecánica con los dispositivos. La batería en el sistema suministra un voltaje de 24 voltios a una intensidad de corriente de amperios 1; Los datos se envían a través de una red Ethernet.
Sin embargo, Nexter ha desarrollado la interfaz Nerva para expandir el concepto de un solo clic al equipo a bordo. Por lo tanto, hay kits de reconocimiento disponibles para este robot, como cámaras de imagen térmica o micrófonos direccionales, así como detectores químicos o dispositivos mecánicos para empujar o remolcar objetos sospechosos (se está desarrollando una herramienta para neutralizar objetos explosivos). La frecuencia del canal de comunicación 2,4 GHz garantiza un rango de un kilómetro en áreas abiertas y medidores 300 dentro de la ciudad. La duración del Nerva LG es de dos horas, el robot puede controlarse desde diferentes sistemas, desde computadoras endurecidas hasta tabletas y teléfonos inteligentes; en este último caso, el canal estándar se cambia al canal Wi-Fi 100 mW con un radio de acción mucho menor. Sin embargo, el robot Nerva LG, que se usa comúnmente como un sistema controlado a distancia, también puede obtener funciones semiautónomas, como conducir a lo largo de las coordenadas GPS especificadas, regresar a casa automáticamente o "sígueme". Un gran número de clientes han pedido varios sistemas para realizar pruebas en condiciones reales. Nexter espera pedidos mayores después de cumplir con los requisitos para el nuevo equipo a bordo, expresado por los compradores actuales.

Todos los robots Nexter Nerva se crearon con el fin de reemplazar rápidamente la rueda para adaptar el robot a la superficie en la que funcionará.


Nerva S es un miembro ligero de la familia de robots Nexter; El asa retráctil posterior se usa no solo para lanzar un robot, sino también para encenderlo
El modelo serial Nerva LG se mostró en la exposición Milipol 2013 junto con su hermano menor Nerva S. Este robot de dos ruedas pesa solo dos kilogramos, puede usarse tanto en interiores como en áreas abiertas; La batería de iones de litio en 21,6 voltios con una capacidad de 2700 mAh permite que el dispositivo funcione de forma continua durante las horas 4. La inclusión se produce debido a la extensión de la cola trasera, que se dobla a lo largo del cuerpo para ahorrar espacio en la configuración de transporte. La cola se usa no solo para estabilizar el robot durante la operación, sino también para lanzarlo en largas distancias, incluso desde un automóvil en movimiento. Y dado que Nerva S se creó originalmente como un sistema abandonado, su masa y fuerza le permiten ser lanzado a través de una ventana. En cuanto al modelo LG, la sustitución de la rueda se realiza en un solo movimiento. Para aumentar la movilidad, se pueden agregar topes de rueda en cada lado para instalar las pistas, en este caso las ruedas delanteras actúan como ruedas dentadas de accionamiento. Esta versión del robot fue designada Nerva DS. Nerva S tiene el mismo rango de velocidad que LG y usa el mismo canal de comunicación. Está equipado con una cámara de alta resolución y un micrófono, además de un diodo de luz de fondo y un LED infrarrojo frontal. El modelo Nerva S también se puede implementar con dispositivos adicionales que se adjuntan mecánicamente a las guías Picatinny. Robot Nerva S se produce en serie.
Novatiq: La compañía suiza produce un solo modelo PocketBot. El robot es impulsado por tres motores eléctricos, todos ellos instalados en la carcasa, uno de ellos gira la tercera rueda trasera a través de una transmisión por correa. Con una masa de solo 850 gramos, PocketBot puede soportar una caída en la altura de los medidores 8 y un tiro a los medidores 30. Según la compañía, la configuración de tres ruedas puede reducir significativamente su energía cinética en el impacto en comparación con la configuración de cuatro ruedas. Inmediatamente después de aterrizar y comenzar a moverse, PocketBot recupera su posición normal, ya que no es un sistema completamente simétrico. Las dos ruedas principales están equipadas con salientes en forma de T, que aseguran un movimiento suave en una superficie plana, así como una adhesión óptima a la arena, piedras y vegetación. La tercera rueda trasera es suave, ya que las pruebas han demostrado que las protuberancias en forma de T crean un agarre excesivo, lo que ralentiza significativamente el robot al girar.
Según la compañía, la distancia al suelo del robot PocketBot 14 mm le permite hacer frente a los obstáculos verticales 30 mm y las pendientes 40 °. Delante de la caja, hay una cámara de color de alta resolución, que gira ± 90 °. En condiciones de poca luz, la cámara con zoom digital x8 cambia automáticamente a monocromo para condiciones de poca luz. La luz infrarroja también está disponible, sin embargo, el operador puede cambiarla al modo manual para usar luz blanca. Se instala un micrófono a prueba de agua, así como un pequeño altavoz a prueba de agua que le permite comunicarse con personas cerca de PocketBot, por ejemplo, un rehén. En la parte superior del PocketBot, hay puntos de conexión para instalar dispositivos adicionales, como una cámara de imagen térmica o detectores químicos. El equipo se puede instalar en la fábrica, pero en este caso es necesario sacrificar el abandono de PocketBot. El dispositivo se activa con el interruptor superior, pero un forastero no lo puede apagar, ya que esto solo se puede hacer desde el panel de control.

El robot de tres ruedas PocketBot de la empresa Novatiq está diseñado para las fuerzas militares y policiales.

Las dos ruedas principales de PocketBot están diseñadas específicamente para proporcionar el máximo agarre en diferentes superficies.

Gracias a sus pistas, StoneMarten puede hacer frente a terrenos difíciles; Se pueden instalar varios sistemas en los carriles Picatinny.
Novatiq ha desarrollado la unidad de control Crab-3. Esta unidad que pesa 0,7 kg y dimensiones 200x110x450 mm tiene una pantalla táctil en color con una diagonal de pulgada 3,5, y se alimenta con una batería de cambio rápido. La misma batería cuesta en el propio robot para reducir la carga logística, el tiempo de operación continua es de 4-5 horas. Un sistema de grabación de video digital también guarda las imágenes en una tarjeta SD para su posterior análisis. El kit PocketBot consta de un robot y una unidad de control, dos cargadores, cuatro baterías, un auricular, varias piezas de repuesto, como ruedas, antenas, enchufes, etc. En la actualidad, la configuración de la plataforma PocketBot es finalmente aprobada. El cliente lo ofrece con un canal de datos estándar que proporciona un radio de operación 250 en áreas abiertas y medidores 70 en visibilidad indirecta. Novatiq está listo para reemplazar el canal de comunicación según los deseos del cliente, por ejemplo, con el sistema COFDM (multiplexación por división de frecuencia ortogonal codificada), la división de frecuencia ortogonal de las señales codificadas. Novatiq ya ha recibido varios pedidos en Europa y está listo para suministrar un cliente no identificado de Medio Oriente para sus fuerzas especiales.
El segundo robot terrestre en la cartera de Novatiq es rastreado y bastante pesado. Recibió la designación StoneMarten y está diseñado para implementar sensores en áreas de alto riesgo en diversos tipos de terreno, ya que las pistas minimizan el tamaño y el peso y maximizan el rendimiento. El robot ya se ha vendido a compradores no identificados de Europa y África. Pesa 4,5 kg, lo que le permite definirlo en la categoría de robots abandonados con un gran estiramiento; La altura de caída permitida es de tres metros y una caída de cinco metros. Con dos motores eléctricos, puede alcanzar una velocidad máxima de siete km / h, y dispositivos especiales de aletas permiten que el robot suba las escaleras. Este modelo se distingue por una cámara de color de doblez frontal de alta resolución, la panorámica se realiza moviendo lentamente el robot. Tres cámaras de color fijas más están instaladas en la parte posterior y los lados; Todas las cámaras en cada lado están equipadas con luces LED blancas e infrarrojas, un micrófono y un altavoz completan el paquete estándar. Los rieles de Picatinny le permiten instalar equipos adicionales; hay disponibles cuatro conectores para la alimentación, la señal de video y la transmisión de datos. El robot tiene cierto nivel de autonomía, por ejemplo, la capacidad de regresar al último punto con buena calidad de comunicación o regresar al operador. Al igual que PocketBot, el robot StoneMarten actualmente tiene una configuración aprobada, pero la compañía mantiene un cierto nivel de flexibilidad funcional para satisfacer las necesidades del cliente.
Novatiq está desarrollando actualmente una nueva serie de vehículos no tripulados, todos bajo la designación Nova, seguido de un sufijo. Todos estos productos se encuentran todavía en la etapa de prototipo y, por lo tanto, todas las especificaciones técnicas son preliminares. El más pequeño de la nueva línea es el robot NovaCTR (Close Target Reconocimiento - inteligencia de objetivos cercanos), que definitivamente pertenece a la categoría de aquellos que están siendo abandonados. Su peso es 600 gramos (incluso más pequeño que PocketBot), tiene una configuración de pista y, por lo tanto, se puede considerar como una adición a un PocketBot de tres ruedas. El dispositivo tiene la misma resistencia al impacto que el robot Throwbot. El robot lleva en su tablero una cámara de color frontal fija con iluminación normal e infrarroja, así como un micrófono y un altavoz. El rango de trabajo reclamado es 100 metros en línea de visión y 30 metros en otros casos. NovaCTR tiene una configuración aprobada y se agregó recientemente a la cartera de Novatiq; La compañía actualmente está negociando con potenciales compradores.

NovaSSR: el último producto de la compañía suiza Novatiq, pero dos robots más están en la etapa final de diseño.
Hay un par de robots más en el catálogo de la compañía, son un poco más pesados, pero aún entran en la categoría de aquellos que están siendo abandonados. NovaMRR (Reconocimiento de medio alcance - Reconocimiento de medio alcance) y Nova SRR (Reconocimiento de corto alcance - Reconocimiento de corto alcance), respectivamente Chasis con ruedas 4xXNNXX y chasis con orugas con aletas. Sin embargo, estos dos chasis se pueden transformar, respectivamente, en seguimiento y sobre ruedas. NovaMRR desarrolla una mayor velocidad máxima en comparación con la contraparte del rastreador, 4 km / h contra 10 km / h, mientras que este último es capaz de superar los pasos. En cuanto a las características de lanzamiento, el chasis con ruedas puede soportar una caída de cuatro metros y un tiro de seis metros, y para las contrapartes sobre orugas, estas cifras son de tres y cinco metros, respectivamente. El MRR está equipado con una cámara de color frontal de alta resolución con zoom virtual virtual y tres cámaras de color fijas montadas en los laterales y en la parte posterior para proporcionar una cobertura circular de 4,7 °. El modelo SRR también tiene una cámara frontal, pero inclinada eléctricamente. Si bien ambos robots están equipados con un micrófono y un altavoz para la comunicación bidireccional con el operador, la versión con seguimiento también tiene LEDs blancos e infrarrojos en los cuatro lados. Ambos robots pueden transportar dispositivos con un peso total de 360 kg montado en un riel Picatinny, también está disponible un cierre mecánico opcional con placa; La fuente de alimentación y la transmisión de datos se realizan a través de conectores de la empresa Fischer Connectors.
información