Robots de tierra. Desde sistemas de lanzamiento a convoyes no tripulados (parte de 2)

La empresa alemana Optimess ha desarrollado un iSnoop de dos ruedas, que estaba equipado con dos tipos de ruedas, una de las cuales está diseñada para moverse en escaleras
Optimess: La empresa alemana Optimess ha desarrollado en el campo del calcinable robots nuevo producto iSnoop. Está disponible con diferentes juegos de ruedas para obtener una movilidad óptima en diferentes superficies (incluidos escalones) y velocidades requeridas. Su sistema de comunicación inalámbrica proporciona un alcance interior de 50 metros y un alcance exterior de 200 metros.
Una cámara de alta resolución con función de captura captura imágenes de video y un micrófono recopila datos acústicos. Además de la cámara estándar se pueden instalar otros dispositivos, como analizadores de gas. iSnoop puede operar de forma continua durante hasta dos horas, el robot se encuentra en la última etapa de desarrollo y estará disponible en el año 2014.
Robo-equipo: Hace un par de años, la compañía israelí Robo-team mostró un robot ligero y abandonado con un bonito acrónimo Iris, que significa Sistema de Inteligencia y Reconocimiento Individual (un sistema de inteligencia y recopilación de datos individual). Pesaba un kilogramo con dos baterías AA, que proporcionaban las horas de operación del 4-6; El lanzamiento se llevó a cabo utilizando el sistema de lanzamiento tipo eslinga. Con el tiempo, Iris se ha convertido en un producto de preproducción.
El robot original es muy duradero, está hecho de materiales compuestos y está diseñado de acuerdo con el concepto de "seguro", lo que le permite soportar la caída de los medidores 10 o el aterrizaje después de volar a los medidores 65, lo que hace posible que un robot con la "tasa de caída más extrema" . Estaba equipada con una cámara día / noche delantera con un mecanismo de inclinación ± 90 °, un puntero láser en la región espectral visible e infrarroja cercana y un micrófono y un canal de comunicación protegido en los medidores 200. Debido a su diseño simétrico, podría caer de cualquier lado y estar listo para trabajar. Las dimensiones en mm de 175x205xXXUMX permitieron al soldado llevar a Iris en su bolsillo. El robot tenía un diseño inusual, el eje delantero era mucho más ancho que el eje trasero. Las ruedas estaban hechas de nylon compuesto, cada una tenía seis puntas para colgar el agarre en un suelo duro.
En la segunda etapa de desarrollo, la mayoría de los elementos, incluida la arquitectura, se conservaron. Sin embargo, el concepto de eslinga fue rechazado, aunque Robot Iris mantuvo su capacidad para ser abandonado. El tamaño ha cambiado a 229x203x94 mm, el peso ha aumentado a 1,3 kg, pero ha agregado una capacidad de carga útil de un kilogramo. Las ruedas también han sido modificadas. Varios robots Iris en esta configuración se entregaron a los clientes que los utilizaron para pruebas y operaciones, lo que permitió al equipo de Robo obtener datos invaluables para el desarrollo de una versión de producción, que se entregó por primera vez en junio, el 2014 del año. La arquitectura asimétrica del concepto probado fue rechazada en favor de la forma rectangular tradicional. Picatinny guía en la plataforma superior puede aceptar dispositivos que se conectan a través del conector RS232, conectores de video / audio o Ethernet, por supuesto, después de instalarlos, no se trata de lanzar el robot. Robot Iris está equipado con llantas completamente nuevas, conserva la capacidad de subir escaleras y, según el equipo de la empresa Robo, sus capacidades han aumentado en comparación con los primeros modelos. Puede superar obstáculos con una altura de 64 mm y pendientes de 45 ° (100% en términos de transporte) y tiene una velocidad máxima de 4,8 km / h. El sistema de transmisión de datos tiene la capacidad de autocuración, ampliando el alcance del robot, especialmente en áreas urbanas. Iris está controlada por el bloque Rocu-5, que se desarrolló junto con el robot para ofrecer una pantalla resistiva y sensible al tacto que se puede leer a la luz del sol, compatible con las gafas de visión nocturna 5 pulgadas en lugar de la pantalla táctil anterior 4,3. Se dejó un joystick de un dedo y se aumentó la cantidad de botones a seis, tres en cada lado de la pantalla. La cantidad de memoria ha aumentado significativamente, se han agregado GPS, acelerómetros y una brújula digital, así como cámaras delanteras y traseras en el 5 MB. El tiempo de funcionamiento continuo es de 3 a 6 horas, pero lo que es más importante, la masa se ha reducido de 700 a 540 gramos.


El nuevo Iris de Robo-team tiene un diseño totalmente simétrico y está equipado con un riel Picatinny, que le permite instalar dispositivos que pesan hasta un kilogramo.


Los robots Iris de Robo-team están equipados con un canal de comunicación que le permite crear una red de recuperación automática, que le permite aumentar el alcance de estos sistemas cuando trabaja en la ciudad
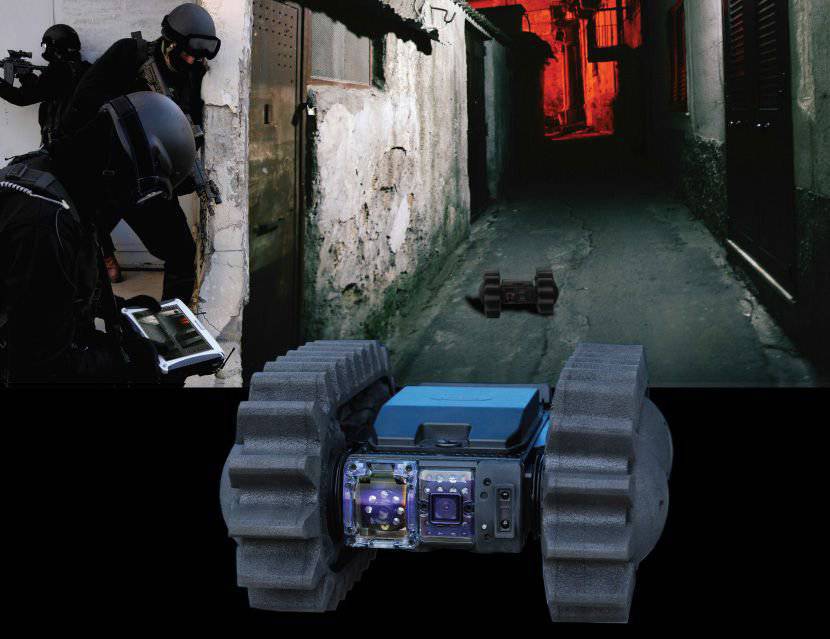
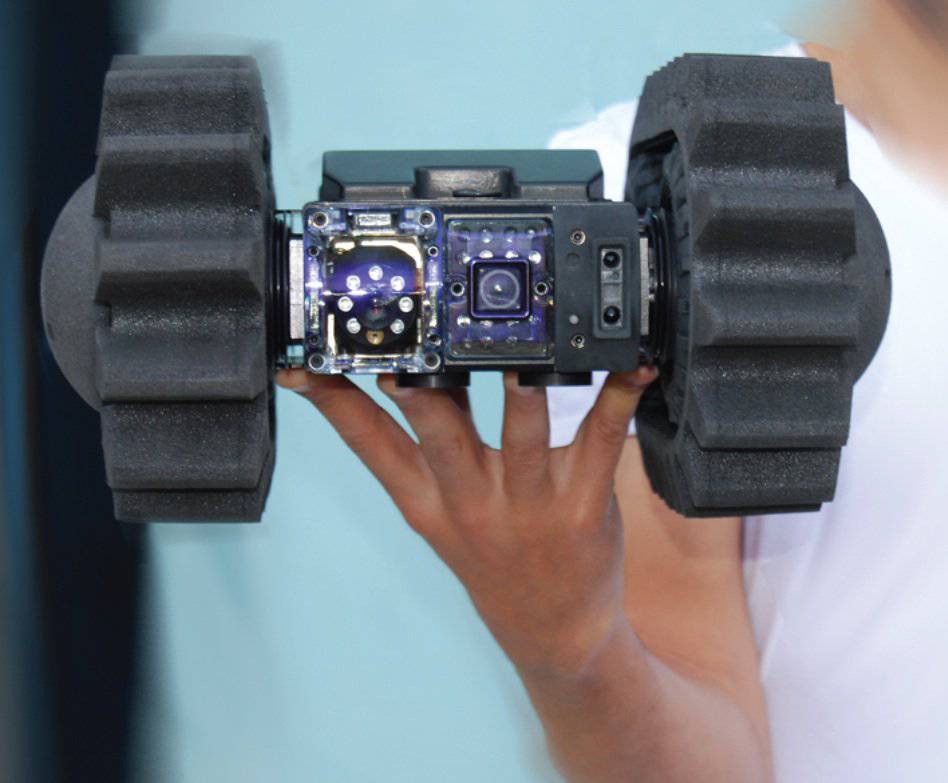
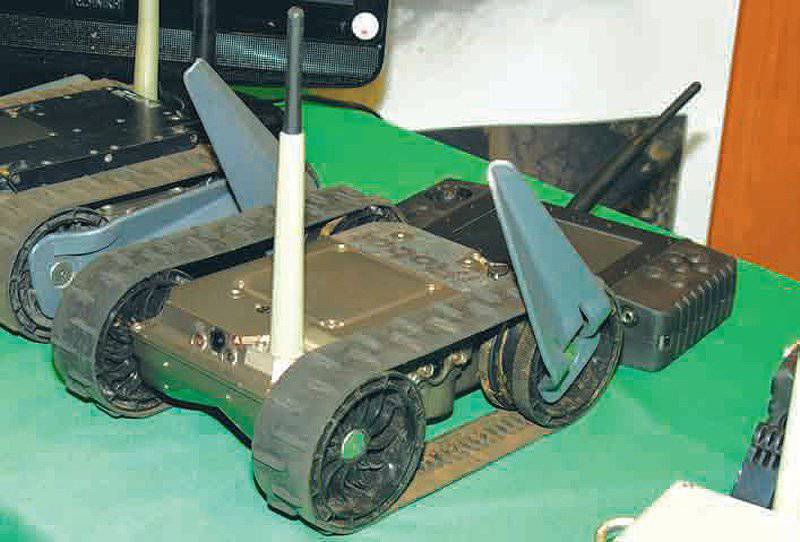
Después de la adquisición de ODF Optronics por el Grupo Mistral, este último está promoviendo actualmente el robot EyeDrive
Seguridad Mistral: En septiembre, 2013, Mistral Group adquirió la compañía israelí ODF Optronics y de facto ingresó a la comunidad de fabricantes de robots de tierra. EyeDrive está diseñado como un complemento del primer sensor lanzable creado por ODF; La configuración de 4x4 se puede convertir rápidamente en un rastreador agregando pistas de goma a las ruedas existentes con un ligero aumento de tamaño a 350x320x165 mm.
EyeDrive pesa 3,76 kg, en cada lado se instala en blanco y negro en la suite 0,08 o en la cámara a color en la suite 0,19. Se puede montar una cámara adicional con un puntero láser delante a la derecha. Puede girar a la derecha-izquierda 48 °, la visibilidad a la derecha se reduce ligeramente al instalar pistas. Un micrófono capaz de capturar sonido a cinco metros de distancia también forma parte del kit táctil. Un módulo de comunicación de un kilogramo, conectado a través de USB a un portátil reforzado, proporciona un canal de comunicación con el robot EyeDrive. El radio de acción indicado es 400 metros en espacio abierto y 70 metros dentro de edificios; Las señales de control del robot se envían a través del canal 915 MHz, mientras que las imágenes de video se transmiten a la frecuencia 2,4 GHz. Las baterías de iones de litio ofrecen una vida útil promedio de dos horas (el tiempo varía según el sensor utilizado), la capacidad de carga útil máxima es de 3,5 kg. Como regla general, las compañías israelíes guardan silencio sobre sus clientes extranjeros, pero está claro que el robot EyeDrive está en servicio con el ejército israelí.

Agregar un asa facilita lanzar un EyeDrive o, en este caso, transferirlo a un perro



La empresa británica Robosynthesis ha desarrollado un concepto totalmente modular. La foto superior muestra el componente de Robocube en el que se basan la mayoría de los robots de la compañía.
Robosíntesis: La categorización de robots de tierra es una tarea desalentadora. Con Robosynthesis, esto se vuelve aún más difícil, ya que la compañía británica ha desarrollado un concepto completamente modular que le permite reconfigurar el tamaño, la configuración y el rol de sus robots. Plug-and-play (el principio de reconocimiento automático y configuración de dispositivos conectados) es una palabra clave en el sistema Robosynthesis. Los módulos, llamados Robocube, son elementos clave del sistema, ya que permiten no solo realizar tareas específicas, sino que también tienen su propio poder de cómputo. Gracias al conector universal patentado con un cierre giratorio hecho de materiales no metálicos, se garantiza la conexión mecánica confiable de los módulos, la conexión del elemento de suministro de energía y un canal de comunicación con un alto rendimiento. Los diferentes módulos, ya sean módulos de viaje, módulos de sensor, módulos de potencia, módulos de computación, lidars, módulos de comunicación, módulos de herramientas, están todos ensamblados en un solo robot al estilo del diseñador Lego debido al conector universal. El mismo sistema se utiliza para instalar dispositivos de terceros. En la actualidad, el conector universal se ha mejorado para aumentar la clasificación de protección (clasificación IP) equivalente al buceo a medidores 100; Esto permitirá que los robots de Robosíntesis trabajen en atmósferas potencialmente explosivas.
El diseño se está analizando para que se puedan realizar modificaciones que hagan que el conector sea realmente seguro y esté sujeto a la certificación ATEX (directivas de la UE que describen los requisitos para equipos y trabajos en un entorno potencialmente explosivo). En cuanto a la movilidad, se desarrollaron varios modelos de ruedas para que el robot pudiera moverse en cualquier tipo de terreno. Al optimizar la movilidad, Robosynthesis se inspiró en los seres vivos: las ruedas hemisféricas para probar los colectores y las líneas de agua se tomaron de artrópodos que usan paletas de remo para evitar atascarse en piedras o en la vegetación, mientras que las "garras" imitan el trabajo de patas de insectos y Utilizado para el movimiento en todo tipo de terrenos. Las pistas impulsadas, que generalmente no están en contacto con el suelo, hacen que girar sobre los obstáculos sea una ventaja.
Los robots de Robosynthesis utilizaron materiales y tecnologías de alta tecnología tomados de la Fórmula 1, por ejemplo, polímeros metalizados. Son mucho más ligeros que los de materiales estándar, lo que les permite tener una mayor capacidad de carga o un tiempo de operación mucho mayor con el mismo conjunto de baterías.
Entre los robots más pequeños ofrecidos por Robosynthesis, vemos Armourdillo. Este es un dispositivo portátil de recolección de información táctica que se puede ensamblar alrededor de un módulo con un motor de Robocube sin herramientas en unos pocos minutos. El robot proporciona una descripción general de 360 °, y su sistema de comunicación puede formar una red de malla para aumentar el alcance y aumentar la flexibilidad funcional mediante el uso de varios robots Armourdillo. El robot es muy duradero, comienza en una palanca trasera extraíble. Esta palanca también se utiliza para aumentar la estabilidad y la permeabilidad a través de obstáculos. Las pistas impulsadas también pueden ayudar a superar los obstáculos, y la rueda se “clava” en un terreno todo terreno. Cuatro conectores universales están protegidos por fundas extraíbles, dos en la parte superior, una en la parte delantera y otra en la parte posterior; Le permiten tomar varios dispositivos con un peso total de hasta dos kilogramos, pero luego no puede lanzar un robot.
Otro producto de la empresa Robosynthesis, que puede atribuirse a la categoría "light" es el Roboforce 1, en la configuración 4x4 su peso es 2,9; Dos conectores en la parte superior le permiten aceptar dos dispositivos diferentes (peso máximo de 2,5 kg). Se puede utilizar un conector para instalar un segundo módulo de alimentación, que duplica la duración de una hora y media a tres horas. El índice de protección del robot es IP 67, es decir, se puede sumergir un metro; Está equipado con un canal de comunicación Súper OFDM (multiplexación por división de frecuencia ortogonal) que proporciona el ancho de banda y el rango máximos de medidores 1000 en áreas abiertas y aproximadamente metros 100 en edificios urbanos con visibilidad indirecta. El Roboforce 1 tiene una cámara frontal a bordo, pero también se pueden instalar varios tipos de sensores, incluyendo cámaras diurnas o cámaras termográficas. El robot puede moverse a velocidades de 4,8 o 10 km / h.
Los robots Armourdillo y Roboforce 1 que se están desarrollando actualmente son solo dos modelos de una variedad de robots terrestres que se pueden "ensamblar" utilizando la tecnología Robosynthesis; Entre los varios proyectos en desarrollo, también hay una plataforma anfibia.
Piap Esta empresa polaca ha desarrollado un robot táctico abandonado Taktyczny Robot Miotany (TRM). Los motores eléctricos y la electrónica (incluida una cámara, faros LED y un micrófono) se encuentran dentro del cuerpo cilíndrico. Cola trasera estabilizadora con peso en el extremo que garantiza un movimiento adecuado. El peso de la unidad 1,4 es kg, se puede lanzar a los medidores 15-20 y puede sobrevivir al caer desde una altura de los medidores 9. Dimensiones TRM 210x167x190 mm, puede alcanzar una velocidad de más de tres km / h, y la duración de la operación continua es de una hora. Su estación de control le permite trabajar con tres robots a la vez, el contenedor de envío contiene tres robots TRM y una estación de control. Según algunas fuentes, Piap está desarrollando aún más su TRM y pronto aparecerá una nueva versión de este robot.
MacroUSA: No solo los ejércitos necesitan robots. Cada año, la Marina de los EE. UU. Y el Cuerpo de Marines llevan a cabo miles de operaciones de interdicción marítima denominadas Operaciones de Interdicción Marítima (MIO) con la participación de grupos VBSS (detección y detención de barcos que realizan actividades ilegales en el mar) que realizan operaciones de búsqueda que a menudo tienen lugar en un entorno hostil. Por lo tanto, en 2011, el Centro de Sistemas Espaciales y Navales realizó una evaluación de varios robots y sensores abandonados pequeños en el cliente para confirmar los requisitos y desarrollar los parámetros operativos básicos para el robot MIO. Luego, MacroUSA recibió un contrato para el diseño y desarrollo de dos sistemas experimentales, cada uno de los cuales consta de una unidad de control con una pantalla y dos pequeños robots flotantes Stingray. El centro de desarrollo solicitó un robot con una masa de aproximadamente 1,5 kg, que encajaría en un bolsillo del estándar Molle (Equipo de transporte de carga modular liviano, un sistema modular liviano para el equipo de transporte). Con respecto a la movilidad, debe superar los obstáculos habituales en la plataforma, como cuerdas, cables, cadenas de anclaje en altura desde 37,7 a 50 mm, y no estar atascado en las rejillas de la plataforma. A menudo, las cubiertas de los barcos están cubiertas de petróleo y barro, y por lo tanto, el robot necesita un agarre suficiente para mantenerse en su lugar en estas situaciones y para mantenerse estable cuando los mares se aproximan a los puntos 5 en los barcos de vela dhow tradicionales que son comunes en el Mar Rojo y el Océano Índico. El robot debe soportar una caída de cinco metros sobre la plataforma de acero y ser impermeable hasta una profundidad de un metro, mientras que no solo debe flotar en el agua, sino también flotar, para este fin se le adjunta un dispositivo flotador.
Además, se solicitaron sensores ópticos-electrónicos con la posibilidad de funcionamiento las 24 horas y un sistema de audio bidireccional. Un dispositivo de activación por control remoto capaz de atraer la atención de los oponentes o cegarlos en completa oscuridad también estaba en la lista. Se le agregaron puntos de sujeción para el mástil telescópico y la cuerda, más una unidad de control para dos robots, uno controlado por el operador y el otro que actúa como un sensor de movimiento para proporcionar la parte trasera de todo el grupo VBSS.
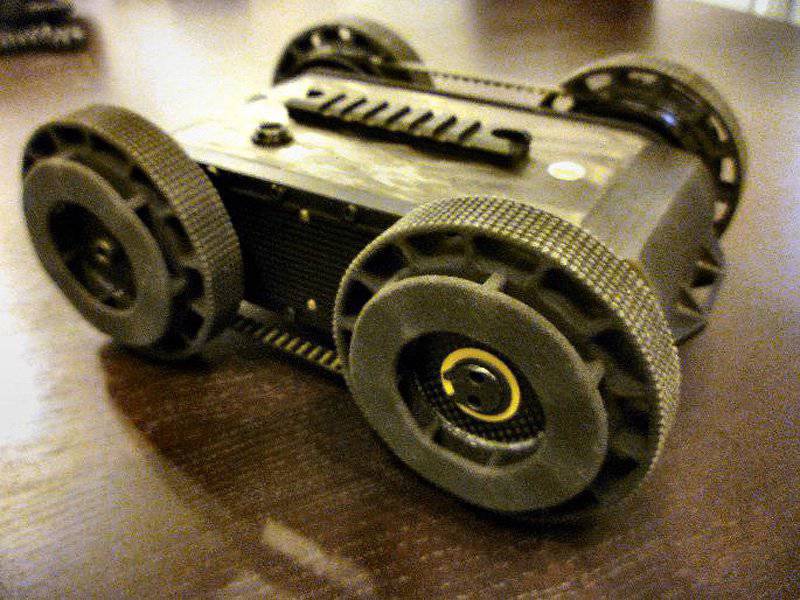

Stingray de MacroUSA fue el desarrollo posterior del robot Beetle, fue creado especialmente en respuesta a las necesidades del Comando del Espacio y los Sistemas Navales Navales en el robot para operaciones de interdicción marítima

La última versión de la masa del Beetle 1,8 kg puede soportar una caída desde una altura de tres metros hasta el concreto y tiene una capacidad de carga útil de 700 gramos
En el catálogo de MacroUSA durante varios años, ya se ha instalado el robot Beetle, que era adecuado en tamaño y peso, pero no cumplía con muchos otros requisitos. Uno de estos requisitos fue una mayor resistencia, los componentes de aluminio de Beetle no eran lo suficientemente fuertes. El costo y los problemas de mecanizado se "jugaron", no a favor del uso de titanio, sino a favor de un chasis monolítico de fibra de carbono con paneles laterales de aluminio para aviones, ruedas y soportes internos de fibra de carbono, espuma de célula cerrada para flotabilidad, que mantuvo la masa dentro de 1,8 kg La altura está determinada por la capacidad de superar los obstáculos (para superar la cuerda en 50 mm se necesita una rueda de casi el doble de diámetro), el ancho está determinado por la batería; La longitud del chasis sellado requerido flotabilidad debía ser determinada por los diseñadores. Por lo tanto, el tamaño de Stingray era 253,9x205,5x95,5 mm, que es casi un volumen de 4500 cm3; este valor límite fue establecido por el cliente. Pronto, MacroUSA abandonó los sistemas de soporte de flotabilidad activa y ofreció un dispositivo de soporte de flotabilidad de alta visibilidad que se envuelve alrededor de Stingray para trabajar en el agua y permite que el robot mantenga la distancia al suelo.
La movilidad en el agua o el agarre en superficies metálicas mojadas o aceitosas ha llevado a un compromiso en la configuración de la rueda. La solución final fue el diseño con microbugs en las ruedas y proyecciones laterales con cuchillas direccionales.
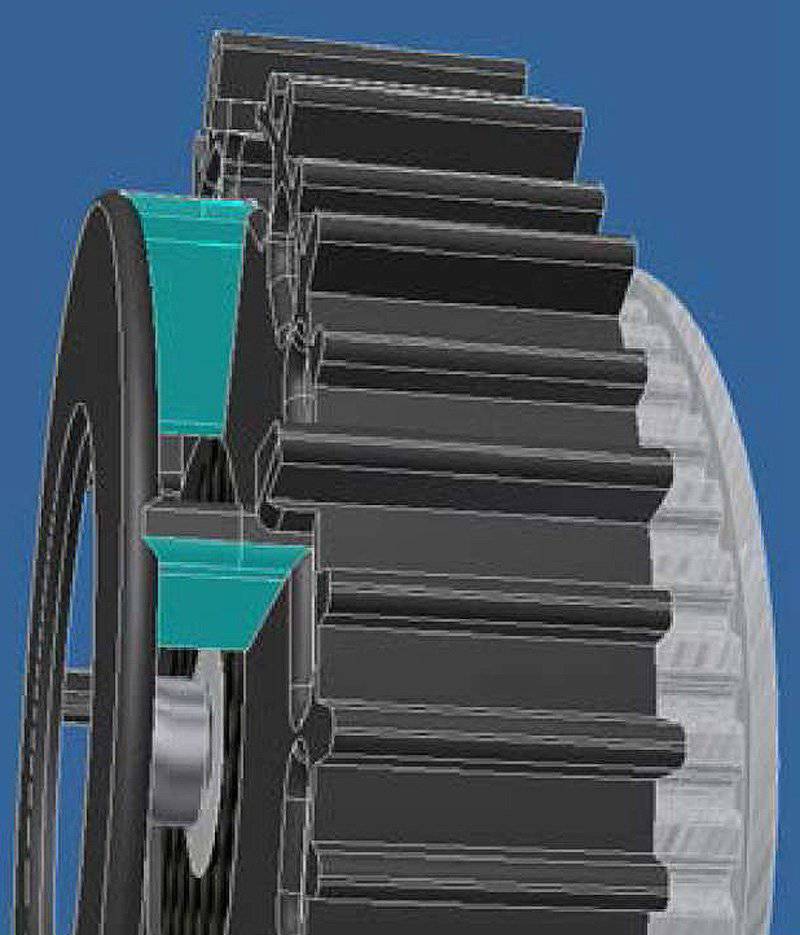
Un primer plano de la rueda de un robot Stingray con proyecciones laterales con cuchillas direccionales (turquesa)
El cinturón intermedio entre los dos ejes ayuda a superar los obstáculos. El robot Stingray está equipado con una cámara día / noche con un campo de visión 50 °, que tiene un ángulo de inclinación ± 85 °; Las señales de video y control se invierten automáticamente cuando el robot gira. Frente al Stingray LED luces blancas y espectro infrarrojo. En el riel Picatinny, puede instalar un dispositivo adicional (máximo 700 gramos) que se conecta al robot a través del conector RS232. En este caso, es natural que tirar el robot ya no sea recomendable. Las baterías proporcionan un tiempo de trabajo de más de dos horas. Hay dos canales de transmisión de datos: la compresión con la división de frecuencia ortogonal de las señales codificadas proporciona comunicación de video, mientras que el robot se controla mediante un canal con una señal de banda ancha con saltos de frecuencia. El radio de acción en la línea de visión es 200 metros y en otros casos 50 metros. Como ya se señaló, Stingray es un desarrollo del modelo anterior Beetle, que permanece en el catálogo de MacroUSA para los clientes que no requieren la aplicación marítima del robot.
Debido al hecho de que los militares participan cada vez más en operaciones antipiratería, la compañía está actualmente a la espera de la emisión de un contrato del comando de los sistemas navales y espaciales de la Armada (ya se ha emitido una solicitud de presupuesto para los sistemas 200).
En la fila superior de la categoría de robot ligero, MacroUSA desarrolló Armadillo, que se ofreció en varias versiones. Los robots de las versiones Armadillo V3.5 y V4.0 con una masa de 3,13 kg y 3,70 kg, respectivamente, permanecen en la categoría de los lanzados, ya que ambos pueden soportar una caída desde la altura del medidor 2,5 o un vuelo horizontal de ocho metros. Pueden comenzar a trabajar inmediatamente después del lanzamiento, ya que tienen un diseño completamente simétrico, por supuesto, en este caso no se recomienda instalar ningún dispositivo adicional. Ambas versiones están equipadas con listones Picatinny y conectores RS-232 / 485 para instalar o conectar sensores o actuadores, como dispositivos de eliminación de artefactos explosivos, manipuladores o cámaras rotativas de imagen térmica sin enfriar, con un peso total de hasta tres kilogramos. Ambas opciones tienen un campo de visión circular en 360 °, provisto por cámaras de color día / noche con zoom digital x2 instalado en todos los lados. La cámara frontal se puede inclinar en la versión V4.0. Las diferencias restantes son menores: la versión V3.5 tiene dos cámaras, luces LED infrarrojas delanteras y traseras, mientras que la V4.0 tiene una cámara frontal y luces LED en el espectro visible e infrarrojo que se dirigen a los cuatro lados. Ambos robots están equipados con un micrófono y un sistema de GPS opcional, así como un acelerómetro digital. MacroUSA utiliza un canal de datos COFDM (multiplexación por división de frecuencia ortogonal de señales codificadas), que opera en las bandas de frecuencia 1,2-1,4 o 2,2-2,4 GHz (muchas otras bandas están disponibles como opción para clientes militares), con un rango de línea de visión de 300 Y en la visibilidad indirecta de los medidores 200. Usando sus ruedas de goma con un diámetro de 130-mm, los robots Armadillo pueden superar las pendientes de 45 °. Se pueden instalar kits para superar los pasos, que incluyen aletas y orugas de goma en lugar de ruedas. La próxima versión del V4.5 fue diseñada para ofrecer velocidades más altas y mayor carga útil. Cuenta con un mayor número de conectores para conectar varios dispositivos y fue especialmente diseñado para la eliminación de objetos explosivos. Él toma la posición inicial en cualquier golpe y es capaz de superar los pasos.

Robot Armadillo de MacroUSA está diseñado en diferentes versiones y puede sobrevivir a una caída desde un medidor 2,5 de altura. El robot fue utilizado por otros fabricantes de sus propios robots como un componente base.
Dado que muchos programas estadounidenses se han cerrado, MacroUSA ahora cuenta con exportaciones y uso no militar. La compañía está mostrando un mayor interés en algunos programas de compras en Europa, Francia y Polonia, así como en el Lejano Oriente.
Armadillo V3.5 se ha convertido en el punto de referencia para el robot TRP3 de Oto Melara. El robot básico fue revisado a fondo, por ejemplo, en la empresa italiana, los motores eléctricos originales fueron reemplazados por motores sin escobillas. El canal de transmisión de datos también se mejoró, mientras que la unidad de control portátil se modificó para satisfacer las necesidades del ejército italiano. La unidad de control estacionaria instalada en la máquina Freccia 8x8, por otro lado, fue creada por Oto Melara desde cero. La nueva unidad de control se basa en una computadora reforzada con una pantalla de pulgadas 13, que está conectada al centro de comunicaciones con un canal de datos integrado. Desde el principio, la unidad se creó para controlar otros robots de tierra desarrollados por la empresa como parte del programa de digitalización del ejército italiano Forza NEC. Cuando se opera desde un dispositivo portátil, el robot TRP-3 NEC (como se sabe) obtiene acceso a la red Forza NEC a través de la estación de radio personal programable de un soldado. Cuando se controla un robot, se activa una estación de radio programable a bordo para el funcionamiento del robot. Según Oto Melara, el rango del canal de control en áreas abiertas es de medidores 450 y en áreas urbanas de metros 200. El robot fue calificado por el Ministerio de Defensa italiano y el primer lote de seis robots se entrega al ejército italiano.

El robot TRP3 de Oto Melara fue adoptado por el ejército italiano como parte de su programa de digitalización Forza NEC.
El robot TRP-3 NEC se convertirá en el "ojo perfecto" de los regimientos de infantería mediana equipados con la versión Freccia del BMP. El TRP-3 NEC es ligeramente más liviano que el V3.5 original, pero sus dimensiones son básicamente las mismas. La velocidad máxima es 1,8 km / h; El robot tiene seis cámaras: una cámara a color de un día y una cámara de noche en la parte delantera, cámaras de día en la parte posterior y laterales, y la sexta se instala en la parte superior del robot para inspecciones en vehículos sospechosos. La guía Picatinny se integró a pedido del cliente para instalar un buscador de rango láser que, con su GPS integrado y su brújula digital, permite al TRP-3 NEC recibir las coordenadas de un posible objetivo. La interfaz le permite aceptar otros tipos de dispositivos.
iRobot: Entre los productos de la compañía para tareas militares, el más pequeño es el robot 110 FirstLook. La plataforma con orugas, caída y autonivelación puede soportar una caída en el concreto desde una altura de casi cinco metros. Sin el equipo a bordo, la masa es 2,4 kg, el robot 110 FirstLook desarrolla la velocidad 5,5 km / h, sus orugas de goma garantizan una buena permeabilidad en la mayoría de las superficies. El dispositivo puede soportar la inmersión de un metro, está equipado con dos aletas para superar obstáculos y pasos. Inicialmente, las aletas eran planas, pero a altas temperaturas, con las que el Ejército de EE. UU. Y los Marines se reunían en Irak y Afganistán, tendían a deformarse y, por lo tanto, eran reemplazadas por aletas 3D más fuertes. La unidad de control se parece a una consola de juegos para que sea intuitiva para los jóvenes soldados. Las balas impermeables reforzadas tienen una pantalla de cinco pulgadas con una resolución de 800x480 y una masa de 0,9 kg. El enlace de datos a la frecuencia 4 GHz (también está disponible una solución para 4,9 GHz) ofrece un rango en la vista de los medidores 200. Para otras condiciones, iRobot ha desarrollado específicamente equipos de radio que le permiten instalar una red de múltiples nodos entre robots. Originalmente desarrollado para su instalación en robots, ahora este equipo ha sido modificado como una opción de caída.
El kit estándar para el FirstLook de 110 consta de cuatro cámaras del espectro visible / infrarrojo (por lo tanto, hay una iluminación infrarroja en todos los lados) con ampliación digital x8. Sin embargo, se pueden instalar otros dispositivos para tareas de reconocimiento en el riel Picatinny opcional y en el conector auxiliar. La compañía ha desarrollado su propio kit de inteligencia Idac (Implementación y Cámara Integrada - Implementación y Cámara Integradas) que pesa 400 gramos, que es una cámara en un mástil con ángulos de visión de 270 °, avanzado a una altura de 155 mm.
El robot FirstLook también soporta varios sensores de inteligencia. armas destrucción masiva, como LCD 3.3 de Smiths Detections, MultiRAE de RAE Systems y Radiac de Canberra. El robot 110 FirstLook no está bajo las reglas del comercio internacional de armas, está en servicio con el ejército estadounidense y los marines y está expandiendo su base de clientes extranjeros.

Con un peso de 2,4 kg, el FirstLook se puede lanzar una gran distancia, y su energía cinética es suficiente para romper la ventana y terminar dentro
Qinetiq: Dragon Runner 10 de Qinetiq North America está ubicado en el límite superior establecido para mini-robots con respecto a la masa; Es el miembro más pequeño de la familia Dragon Runner (DR). El chasis puede ser con ruedas o con orugas; Cambiar una configuración a otra es una operación simple y rápida que se realiza sin herramientas especiales, las ruedas cambian a los piñones de accionamiento y viceversa. La velocidad máxima es 6,4 km / h debido al número irrompible de motores eléctricos, que también permiten superar pendientes de hasta 100% (45 °). El cuerpo delgado del suelo se encuentra en el 50 mm, una característica necesaria cuando se trabaja en terrenos difíciles. Si no se instala ningún dispositivo, el DR10 es completamente simétrico y puede comenzar a funcionar inmediatamente después del lanzamiento.
El operador puede controlar el robot a través de las cámaras delantera / trasera día / noche, los sonidos transmiten el micrófono incorporado. DR10 se puede utilizar con todas las consolas de administración QinetiQ. El operador ve no solo la imagen de las cámaras, sino también la dirección del movimiento y la posición del robot debido a la brújula digital incorporada y al GPS. La línea de visión en visibilidad directa supera los medidores 650. Dependiendo de la tarea y el equipo a bordo, la duración del trabajo varía de dos a tres horas. DR10 está en servicio con militares estadounidenses y clientes extranjeros, incluido el Reino Unido.


El miembro más liviano de la familia Dragon Runner, el robot Qinetiq DR10 puede tener una configuración con ruedas y otra con orugas y, en ausencia de dispositivos adicionales, es completamente simétrico y puede implementarse lanzando

La nueva configuración FistLook de iRobot tiene nuevas aletas 3D que tienen una gran resistencia, especialmente cuando se trabaja a altas temperaturas.
información