Robots de tierra. Desde sistemas de lanzamiento a convoyes no tripulados (parte de 3)

Al adquirir una configuración de seis ruedas y la capacidad de disparar granadas, el modelo HD de la familia robots Nexter Nerva también ha adquirido nervios para más trabajo muscular
Los tamaños y las masas de los robots de tamaño mediano están creciendo gradualmente, de modo que pueden transportar grandes masas y también pueden dar sus primeros pasos hacia la autonomía de un cierto nivel, aunque todavía están muy lejos de incorporar inteligencia artificial.

El campeón en la categoría de peso promedio Dragon Runner 20, desarrollado por QinetiQ para el Cuerpo de Marines de los Estados Unidos. En la foto con extensores de pista instalados.
iRobot: Además del pequeño robot 110 FirstLook descrito anteriormente, hay robots más grandes en el catálogo de iRobot que han evolucionado desde el PackBot original de 510; Miles de estos robots se sometieron a un servicio real en Irak y Afganistán. El programa del sistema de combate en tierra (GCS) incluyó un pequeño robot portátil que proporcionaría a las unidades de infantería capacidades de reconocimiento autónomas en áreas peligrosas.
Un efecto secundario del programa cerrado GCS fue el sistema 310 SUGV, que tiene la arquitectura típica de iRobot con chasis con orugas y aletas con orugas, lo que garantiza una buena movilidad al superar escaleras y otros obstáculos. Las aletas se eliminan si se necesita una configuración más estrecha (reduciendo el ancho de 437 a 348 mm). El peso sin dispositivos instalados es 13,2 kg; El 310 SUGV puede alcanzar velocidades de hasta 10 km / hy superar obstáculos 305 mm en altura, sus dos baterías BB-2557 / U aseguran el funcionamiento continuo de la hora 1,5, aunque dos baterías BB-2590 / U aumentan el tiempo de funcionamiento a seis horas. Se utiliza un chasis de cámara frontal gran angular (107 °) con iluminación infrarroja para conducir el robot. El sensor principal para fines de reconocimiento es una cámara a color montada en un manipulador manual para iluminación baja con ampliación x10 (campo de visión de 48 ° a 5 °). El canal de comunicación 2,4 GHz proporciona un radio de operación 1000 en áreas abiertas, el operador utiliza un controlador portátil, que incluye gafas de casco Tac-Eye y un controlador manual popular (un controlador endurecido con una pantalla de pulgadas 5,6 está disponible como opción). El modelo 310 en cantidades significativas está en servicio con las fuerzas armadas estadounidenses y extranjeras.
El XM1216 SUGV es un poco más grande y más pesado que los dos modelos anteriores, pesa 14,5 kg sin equipo. Cuenta con el conjunto de inteligencia de largo alcance más efectivo entre los tres robots de la familia: una cámara a color con zoom óptico x26 y una cámara digital x12, así como una cámara de imagen térmica con zoom digital de tres pasos. Todos estos robots pueden equiparse con un brazo robótico para la eliminación de objetos explosivos.
Quinetiq: También en la categoría de pequeños vehículos terrestres autónomos hay otro sistema: el robot multitarea Dragon Runner 20 fabricado por Qinetiq North America para realizar el reconocimiento y desminado. Este robot fue diseñado originalmente para el Cuerpo de Marines de los Estados Unidos; Su peso es de 9,07 kg, la velocidad máxima es 6,5 km / h, tiene cámaras de día y de noche por delante y por detrás y cámaras de día solo en los lados.
Las capacidades de inteligencia pueden mejorarse enormemente mediante la adición de una cámara panorámica con zoom, micrófono omnidireccional y altavoz para proporcionar comunicación bidireccional. Para mejorar la movilidad, se pueden instalar cables de extensión seguidos más un estabilizador trasero para superar los pasos.

En la categoría media, iRobot ofrece su robot 310 SUGV; en la foto "camina" en pasos llevando el dispositivo para neutralizar objetos explosivos

El Scorpion de MacroUSA permaneció abandonado a pesar del peso de los 9 kg, su carga útil es equivalente a su propio peso
MacroUSA: En la misma categoría, MacroUSA ofrece el robot de orugas Scorpion 9 kg, que se puede colocar en la zona de interés gracias a un chasis con alta resistencia al impacto de plástico y refuerzos de aluminio.
El kit táctil estándar incluye una cámara de color día / noche de frente con un campo de visión de 185 ° y ángulos de inclinación de ± 60 ° con luces infrarrojas y LED convencionales, una cámara de día / noche de color trasera y un micrófono. Scorpion puede alcanzar velocidades de 10 km / hy caer desde una altura de un metro. Puede transportar dispositivos de una masa igual a su propia masa, incluidos sensores térmicos o sensores químicos, así como manipuladores o dispositivos para desechar municiones.
Robótica ECA: Entre los robots más ligeros de la categoría media, se encuentra la plataforma multitarea Cobra Mk2 con su propio peso de 6,1 kg y una carga útil de cinco kilogramos ofrecida por la conocida empresa francesa ECA Robotics. La compañía ofrece varios dispositivos adicionales, como el módulo CBRN (químicos, biológicos, radiológicos y nucleares). оружие) con sensores químicos y radiológicos y un dosímetro de radiación, un módulo para neutralizar objetos explosivos con un soporte que alberga varios tipos de dispositivos de neutralización y, por supuesto, un módulo de reconocimiento con una cámara de video con vista de 360 °. El robot también tiene una cámara CCD a color con ángulos de visión de ± 80 ° en la parte frontal y una cámara a color fija en la parte posterior. Además, hay LED blancos e infrarrojos, un micrófono y un altavoz para comunicación acústica bidireccional. El Cobra Mk2 4x4 está equipado con neumáticos de baja presión; La batería de iones de litio en los voltios 15 garantiza el tiempo de funcionamiento de la hora 2,5. La velocidad máxima es 5 km / h, y la altura máxima de los obstáculos 150 se supera. La distancia de trabajo indicada en áreas abiertas es de medidores 250; Hay disponibles dos unidades de control diferentes, una con una pantalla de pulgadas 7 y otra con una pantalla de pulgadas 10; el diseño de los joysticks también es diferente para estas unidades.



La compañía francesa ECA desarrolló el robot Cobra Mk2, el primer cliente militar de los cuales fue Canadá. El robot puede ser controlado por unidades de control especiales o sistemas comerciales, como los teléfonos inteligentes.

MTGR (Micro-Tactical Ground Robot) es un robot multipropósito desarrollado por Roboteam, en el que se pueden montar ruedas de gran diámetro.

El robot MTGR en la imagen demuestra su habilidad para hacer palanca en la noche. Su sistema de seguimiento articulado le permite tomar una especie de posturas acrobáticas.
Una de las últimas innovaciones de ECA Robotics es la capacidad de usar tabletas y teléfonos inteligentes basados en el sistema operativo Android para controlar los robots, lo que reduce la carga de los soldados, ya que estos dispositivos se pueden usar para varios propósitos. Esta no fue la única mejora. Ahora, el Cobra Mk2 está equipado con un sistema GPS que le permite al robot memorizar el camino y volver al sitio de lanzamiento automáticamente. Se instalaron ruedas de menor diámetro (menos de 20 mm) para evitar problemas al realizar una inspección de robot debajo de los automóviles; También ahora disponible y un conjunto de pistas para mejorar la permeabilidad en tipos complejos de terreno. Canadá se convirtió en el primer comprador en el campo militar del robot Cobra Mk2, que ordenó robots 20 con una opción de 80 más. Canadá solicitó un sistema con un sistema de control remoto de fibra óptica extraíble que le permita trabajar con el robot Cobra Mk2 a distancias de hasta metros 1000.
Robo-equipo: MTGR (Micro-Tactical Ground Robot) fue desarrollado por la compañía israelí Robo-team como un robot multitarea con la tarea principal de realizar inteligencia para las principales unidades de infantería. Para el trabajo en la ciudad, el MTGR tiene una configuración completamente rastreada, mientras que para la conducción fuera de carretera se mantiene esta configuración, pero con la adición de ruedas de un diámetro mucho mayor, lo que mejora el rendimiento cuando se supera la suciedad, las piedras y los escalones.
Obviamente, aumentar la permeabilidad es costoso en términos de masa y tamaño. La versión estándar pesa 7,3 kg, mientras que la versión con ruedas / oruga pesa 8,6 kg, las dimensiones también aumentan de 455x368X145 mm a 472x470x165 mm, sin embargo, el sistema permanece completamente portátil. El MTGR puede comenzar a trabajar después de ser encendido por el operador en menos de 60 segundos y alcanzar una velocidad de 3,2 km / h. El robot puede superar obstáculos con una altura de 35 cm, pendientes de 45 °, pasos con una altura de 20 cm debido a aletas adicionales seguidas. El robot MTGR está equipado con cinco cámaras, la frontal está instalada en un nicho y tiene un ángulo de inclinación de –20 ° / + 90 °, las otras se instalan alrededor de la caja, lo que proporciona al operador una vista circular de 360 °. La luz LED blanca se instala solo en la parte frontal, mientras que la iluminación en la región del infrarrojo cercano del espectro es circular. El robot MTGR puede equiparse con un manipulador creado especialmente por Robo-team para transformarlo en un medio para neutralizar objetos explosivos con la adición de un sistema. Tiene cuatro grados de libertad con dos articulaciones universales, una articulación de muñeca y agarre. Máxima salida del manipulador 360 de mm y capacidad de carga de 5,4 kg. La mano tiene dos cámaras: una con la ampliación x10 más la segunda cámara en el centro de la empuñadura, ambas con iluminación infrarroja. Otros sensores, como detectores de radiación, analizadores de gases, cámaras termográficas, etc. Se puede integrar fácilmente con la plataforma gracias a la guía picatinny. El canal de comunicación del robot puede formar una red con otros dispositivos, lo que le permite aumentar el alcance a más de 500 metros en línea directa de visión; La duración de la batería es de dos a cuatro horas. El concepto de la red nodal está actualmente bajo presión por nuevas soluciones, por ejemplo, la inclusión de transceptores en los chalecos de los soldados, así como el desarrollo de transceptores que el robot puede dejar atrás antes de ingresar, por ejemplo, una tubería de alcantarillado o un túnel para garantizar una comunicación confiable.
En cuanto a la autonomía completa, la empresa Robo-equipo cree que antes de que sea menos de diez años. Sin embargo, para hacer que el MTGR sea lo más simple posible para el operador, la compañía desarrolló varios modos predefinidos para superar pasos, levantar cargas, etc., lo que reduce significativamente la intervención humana. Como regla general, el robot MTGR viene con la consola Rocu-7, que se ejecuta en Windows 7, tiene una pantalla de pulgadas 7 con una resolución de 1024xXNNUMX. La consola Rocu-600 tiene dos joysticks, ocho botones de hardware y cuatro teclas tipo balancín; Pesa 7 kg con baterías que le permiten trabajar de tres a seis horas. Los resultados de las pruebas realizadas por el Instituto Nacional de Estándares y Tecnología llevaron a una compra urgente de un número no identificado de robots MTGR por parte del comando de fuerzas especiales de operaciones de EE. UU. El ejército también está estudiando el sistema para desplegarlo en unidades de infantería estándar. MTGR también está al servicio de las fuerzas armadas israelíes, y Robo-team está haciendo muchos esfuerzos para mover el robot por todo el mundo.
Nexter: El miembro pesado de la familia Nerva es HD (Heavy Duty) peso 11 kg. Contiene numerosos elementos de robots más ligeros, pero la carga útil se incrementa a 10 kg. En el modelo Nerva HD, se guardan el canal de comunicación, el concepto de un solo clic, dos velocidades y muchos más elementos desarrollados para los modelos LG y S. Pero este robot puede implementarse en tres configuraciones diferentes: 4xXNNUMX, 4x6 y rastreado.

La familia Nerva de robots HD más antigua de Nexter tiene un chasis 6x6 de doble ranura para un módulo de hardware integrado. En la foto en el módulo de lanzagranadas montado robot.
En la configuración 4x4, se instalan ruedas especiales con un diámetro de 300 mm en el robot, lo que aumenta la maniobrabilidad en terrenos irregulares. Además, para superar obstáculos de mayor complejidad, se pueden instalar dos aletas en lugar de ruedas intermedias. Para obtener la configuración de 6x6, cuatro ruedas grandes se reemplazan con ruedas estándar con un diámetro de 150 mm, las mismas que las de la Nerva LG. Al instalar las orugas de goma, las dos ruedas centrales se convierten en guías y funcionan solo como rodillos de la oruga.
El kit táctil estándar incluye una cámara frontal de alta resolución con un campo de visión 110 ° con luz visible e infrarroja y una cámara trasera, así como un micrófono omnidireccional. En comparación con los robots más pequeños, el modelo HD tiene un kit de navegación más completo, que incluye GPS, odómetro, brújula magnética, tres girómetros y tres acelerómetros, el dispositivo también es compatible con el sistema de GPS diferencial. Dichos datos sobre la ubicación exacta son valiosos cuando se trabaja en uno de varios modos semiautónomos, por ejemplo, es la navegación a través de puntos de ruta, patrullas autónomas y el retorno automático al punto de partida. Comparado con el LG Nerva, el modelo HD tiene dos ranuras para los kits funcionales estándar de Nerva; sin embargo, los equipos a bordo se pueden conectar a través de un riel Picatinny o una placa metálica configurable. El modelo HD tiene conectores Ethernet, USB, RS232, una ranura de E / S digital y entrada de video. Nexter ha desarrollado varios kits con una interfaz Nerva, incluida una cámara con zoom x36 en un cabezal panorámico para vigilancia de largo alcance, una cámara de imagen térmica no refrigerada, una batería adicional que duplica la autonomía de dos horas, el intercomunicador bidireccional, un generador de humo utilizado como una respuesta de intrusión o indicador Ubicaciones y más varios sensores CBRN. Los módulos de transporte le permiten realizar operaciones mini logísticas, además, la compañía puede proporcionar herramientas para la remoción de minas.
M-Tecks: Otra empresa francesa, M-Tecks Robotics, ha desarrollado varios robots de tierra ligeros de doble propósito. Arthron simétrico POD 125A 4x4 puede caer sin problemas desde una altura de medidores 2,5. Su simetría no se limita al diseño físico, sino que también se expande en sus sensores: dos cámaras de color y una de noche y dos lámparas LED de luz blanca están instaladas en la parte delantera y trasera. La capacidad de la batería de intercambio en caliente en 12,8 voltios es suficiente para una hora y media de trabajo. La velocidad máxima es 15 km / h con ruedas estándar 170-mm. Las ruedas pueden variar para un terreno específico, aunque en este caso, no se previó un reemplazo rápido por varias razones, incluso debido a las estrictas políticas de precios.
El canal de comunicación del robot POD 125A garantiza la operación hasta medidores 300 en áreas abiertas y hasta medidores 250 en la jungla urbana. Sin embargo, la arquitectura de comunicaciones se creó para operaciones masivas, por lo que se logra todo el potencial del robot de tierra M-Tecks Robotics cuando se implementan varias máquinas en un área más grande. Se pueden utilizar hasta 127 para crear una red, cada una de las cuales funciona como un nodo de red, lo que aumenta el rango y la flexibilidad funcional, especialmente en los cañones urbanos. El robot POD 125A está equipado con un sistema GPS. M-Tecks Robotics tampoco se olvidó de los robots de inspección de tuberías y dejó la opción de control de cables para sus robots de reconocimiento. Para POD 125A, el control por cable es posible a distancias de hasta 30 metros.


La compañía francesa M-Tecks Robotics ha desarrollado un robot Arthron Pod 125 4x4 con un sistema de comunicación que le permite formar una red de tales dispositivos 127

Arthron R 4075 tiene una arquitectura inusual. Los módulos se conectan mediante bisagras universales, lo que permite que el chasis 8 x8 gire y se doble y aumente significativamente la movilidad
En el proceso de búsqueda de movilidad aumentada en superficies difíciles de alcanzar, M-Tecks Robotics desarrolló un robot 9 kg más grande. Recibió la designación R 4075A, su arquitectura de ocho ruedas es bastante inusual. El robot consta de cuatro módulos uniaxiales, que están conectados entre sí a través de una junta universal, lo que le permite distribuir el par de torsión del motor principal con tracción en todas las ruedas. El diseño de articulación múltiple se desarrolló durante cinco años, mejora significativamente los giros y curvas en el plano vertical y, como resultado, mejora la movilidad y la superación de obstáculos tres veces. El motor eléctrico principal está instalado en una de las “cabinas” medianas, y la batería estándar principal de hidruro de níquel-metal en voltios 15 con una capacidad de 6800 Ah, que garantiza dos horas de trabajo, está instalada en la otra. Los dos módulos extremos tienen un motor auxiliar, que proporciona un movimiento relativo entre ellos y el módulo vecino. De este modo, se garantiza la maniobrabilidad de la estructura de enlaces múltiples, lo que le permite lograr la máxima movilidad en terrenos complejos. R 4075 A puede hacer frente a obstáculos 300 mm en altura y 270 mm zanjas, así como superar pendientes hasta 100%. Las ruedas estándar tienen un diámetro de 140 mm, además, se pueden instalar diferentes tipos de neumáticos.
Dos cámaras diurnas, la superior se dirige hacia arriba y la inferior, respectivamente, hacia abajo, permiten obtener un campo de visión vertical combinado 160 °. La cámara de una noche apunta horizontalmente, y dos luces LED blancas brindan una buena iluminación cuando es necesario. La transmisión de video es proporcionada por el canal a la frecuencia 2,4 GHz, y las señales de control se transmiten a través del canal 869 MHz, la distancia de transmisión es de medidores 300 en áreas abiertas y más de 100 en edificios urbanos. Al igual que su hermano menor, el robot R 4075A tiene la opción de control por cable a una distancia de hasta 50 metros. Los modos de operación incluyen control remoto semiautomático, que reduce significativamente la carga del operador, e incluso el modo automático. El software de estabilización de video está disponible, así como una instalación de domo con cámaras a color o de noche.
Ambos modelos POD 125A y R 4075A se controlan desde una consola 2,5 kg con una pantalla en pulgadas 9 y un joystick. En la actualidad, los prototipos de ambos sistemas se están probando en el ejército francés y la experiencia obtenida en estas pruebas se integrará en los diseños que aún se encuentran en la etapa de desarrollo.
Robosíntesis: El sistema modular de esta compañía, descrito en la sección de robots terrestres "ligeros", por supuesto, puede usarse para crear robots más grandes y pesados. Un ejemplo de esto es la plataforma EXTRM multitarea que pesa 9,5 kg, cuya velocidad máxima varía de 1,5 a 6 km / h, según el tipo de unidad de propulsión. Con una altura total de solo 200 mm (diámetro de la rueda), el robot puede superar obstáculos con una altura de 450 mm al instalar barras de cola, manejar pendientes laterales de 40 ° y pendientes de hasta 50 °, siempre que haya suficiente agarre.
El canal de comunicación puede operar a una frecuencia de 2,4 o 5,8 GHz, proporcionando un rango de medidores 1000; La fuente de alimentación son dos baterías recargables de iones de litio, BB2590 / U o BB2557 / U, que proporcionan un tiempo de trabajo de 12 horas o 3 horas, respectivamente. El operador controla el robot basándose en imágenes de una cámara gran angular con resolución 640x480 con enfoque fijo e iluminación infrarroja. Para fines de reconocimiento, hay un kit optoelectrónico panorámico, que incluye cuatro microcámaras incorporadas con diferentes distancias focales, lo que proporciona un aumento paso a paso en el campo de visión de 7,5 ° a 60 °, y la sensibilidad del 0,008 Lux le permite obtener una buena imagen incluso con muy poca luz.
Como todos los sistemas de Robosynthesis, la versión más reciente de EXTRM está equipada con varios conectores universales con los que puede conectar equipos de varios tipos. En la exposición Sofex2014, la compañía presentó el Robocube 4x4. Es más ligero y más pequeño que el EXTRM, en la parte superior hay seis conectores universales y dos en los lados.

Robosynthesis ha desarrollado un sistema EXTRM modular en el que se puede instalar la tracción de la cola para superar obstáculos más altos.

Robocube se presentó en el Sofex 2014. Este es otro robot de categoría media que tiene ocho conectores para instalar baterías o dispositivos adicionales.
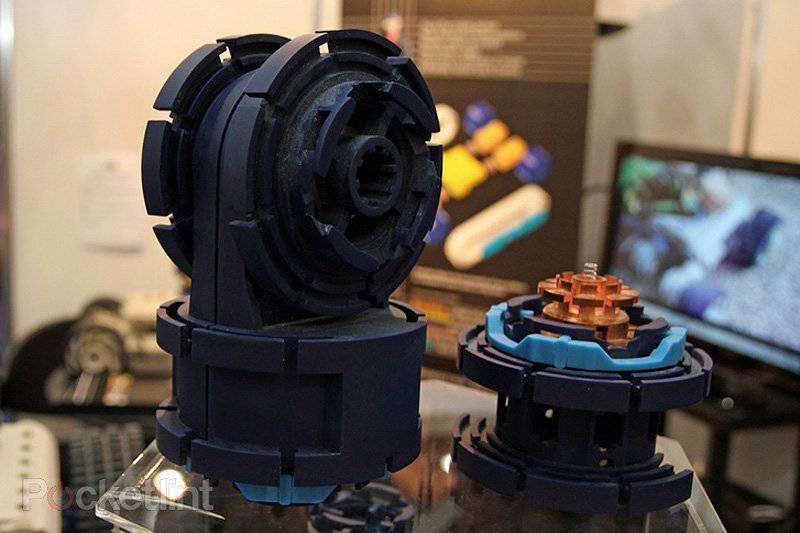

La tierra media de un conector universal desarrollado por Robosynthesis (arriba), que permite la conexión mecánica y eléctrica de equipos con la posibilidad de transmisión de datos (a continuación se muestra una implementación práctica)


El Escorpio de Tecdron es relativamente pesado para un robot de tres ruedas; Fue diseñado con un énfasis en la fiabilidad operativa.
Tecdron: Una vez más, la compañía francesa Tecdron tiene una gran variedad de robots terrestres, desde livianos a pesados. El táctico Robot Escorpio de tres ruedas con control remoto cae en la categoría media con su 5,9 kg. Desde el comienzo del programa en agosto, 2013, la compañía dio prioridad a la durabilidad, calidad de imagen y rango, lo que llevó a la creación de un robot más pesado en comparación con los robots diseñados para tareas similares. El chasis Scorpio está hecho completamente de aluminio de calidad aeronáutica; Es impermeable hasta una profundidad de dos metros y está recubierto con un revestimiento anticorrosión. Puede ser lanzado diez metros sin riesgo de dañar sus componentes. Dos motores eléctricos lo alimentan, y la rueda trasera actúa como un estabilizador. El robot puede superar las pendientes 35 ° y las pendientes laterales 30 °; Las ruedas de goma con un diámetro de 180 mm permiten que tenga una buena permeabilidad en superficies difíciles, como tierra, piedra triturada o arena. La batería de iones de litio 12 con una capacidad de 5,8 Ah proporciona un funcionamiento continuo de cuatro horas; Una segunda batería opcional duplica el tiempo de funcionamiento.
La parte frontal es una cámara de ángulo amplio día / noche, un LED infrarrojo ilumina la ruta y un micrófono se utiliza para la grabación de audio. La imagen y el sonido se transmiten a través de un canal digital a la estación de control, que consta de una pantalla de cinco pulgadas, un joystick y varios botones pulsadores. En la línea de visión, el rango es de medidores 300, y en áreas urbanas y dentro de edificios, el radio se limita a los medidores 100. Scorpio puede llevar hasta 8 kg de equipo, aunque este no es su objetivo principal. Por el momento, ha sido puesto a prueba en la policía francesa durante varios meses. Los militares habían experimentado unidades especiales y su único inconveniente era la misa. La plataforma Vixen más pequeña aún no se ha presentado al público, ya que Tecdron actualmente la está mejorando de muchas maneras y se espera un prototipo de la nueva configuración al final de 2014.
información