Robots de tierra. Desde sistemas de lanzamiento a convoyes no tripulados (parte de 5)

Las últimas líneas del párrafo anterior nos llevaron sin problemas al área de uso de suelo pesado robotsque va más allá de las tareas puramente logísticas. Intentaremos revelar más, al menos parcialmente, este tema fértil, interesante y voluminoso.
G-Nius: Por supuesto, G-Nius, una empresa conjunta israelí entre Elbit Systems e Israel Aerospace Industries, tiene la experiencia más práctica en patrullas pesadas y robots armados. Su primer dispositivo robótico, Guardium, más tarde rebautizado como Guardium Mk.1, entró en servicio en el año 2007. La variante Mk.1 se basó en el chasis todoterreno Tomcar, y la versión Mk.2 se basó lógicamente en el chasis del mismo origen, pero con una capacidad de carga de 400 kg, que es bastante adecuada para tareas de transporte de carga. Luego vino la versión Mk.3 basada en la camioneta Ford F-350. El Guardium original todavía está patrullado por el aeropuerto Ben Gurion en Tel Aviv, y el ejército israelí ha adquirido varios robots de G-Nius.

Guardium Mk1 de G-Nius ha estado sirviendo durante varios años, brindando seguridad en todo el perímetro del aeropuerto Ben Gurion en Tel Aviv

Guardian Mk2 de G-Nius tiene una plataforma de carga en la que puede empacar 400 kg de suministros

El vehículo multiusos híbrido (HMV), la opción más nueva en la línea de robots G-Nius, se mostró en Eurosatory 2014

AvantGuard Mk 1 de G-Nius basado en el amplificador táctico Dumurs Tags (Tactical Amphibious Ground Support); se muestra en la foto de DBMS por Elbit Systems
Más centrado en el uso de combate de AvantGuard, que se basa en el vehículo Dumur Tags del vehículo (Tactical Amphibious Ground Support). Chasis 1,75 de cuatro vías con motor turbodiesel Kubota con potencia HP 100. Desarrolla una velocidad máxima de 20 km / h. Cuatro pistas, cada una con una longitud de medidor 0,91 y una anchura de medidor 0,42 proporcionan una baja presión sobre el suelo y una movilidad óptima. Con una capacidad de tonelaje de una tonelada, se pueden instalar varios tipos de módulos, incluidos los módulos de combate controlados a distancia (SDM). Después de que se desarrolló la versión Mk2 basada en el BTR de M113, este robot recibió la designación en AvantGuard Mk.1.
En general, durante los últimos siete años, los robots G-Nius han trabajado más de 60 000 por horas y, por lo tanto, han proporcionado a la compañía información invaluable de los operadores de estos sistemas. La plataforma más nueva presentada en Eurosatory 2014 se basa en el chasis 4x4 con dos centrales eléctricas en cada lado. Pueden ser motores diesel y eléctricos, lo que le permite obtener una unidad híbrida; de ahí el nombre de vehículo híbrido multipropósito (HMV, por sus siglas en inglés) dado por G-Nius a su producto más nuevo. El prototipo estaba equipado con una estación optoelectrónica de mástil y un módulo de combate de Elbit Systems. Los primeros robots G-Nius estaban equipados con sistemas especiales, pero en la actualidad la compañía israelí ha desarrollado un conjunto adicional que no depende de la plataforma, que se describirá en la sección correspondiente.
Qinetiq: Gracias a los contratos con varias organizaciones de defensa, incluido el comando de las fuerzas de operaciones especiales, y una importante inversión de sus propios fondos, Quinetiq ha desarrollado un sistema modular robótico armado avanzado, Maars (Sistema robótico modular armado avanzado), que es una versión armada de un robot de reconocimiento. Plataforma sobre orugas accionada por motores eléctricos, acelera a 7 km / hy pesa 165 kg.


Robot Maars armado de Quinetiq
De hecho, este es un pequeño vehículo de combate armado con una ametralladora M7,62B de 240 mm con 450 rondas de municiones y un lanzagranadas M40 cuádruple de 203 mm. Los troncos de la instalación se seleccionan individualmente, pueden disparar granadas letales, por ejemplo, fragmentación altamente explosiva y explosiva de doble uso o explosión de aire, así como municiones no letales, por ejemplo, balas de goma, escopeta, gas lacrimógeno, humo, granadas de luz y ruido. El aumento de la fuerza puede comenzar con opciones no letales, por ejemplo, mensajes de voz transmitidos a través de un megáfono de doble cara, que también tiene una sirena de 120 dB, así como un dispositivo de advertencia en un láser verde que alerta o deslumbra una amenaza potencial. La torre puede girar 360 ° con una velocidad angular de 155 ° / s, los ángulos de puntería vertical son -20 ° / + 60 °. La visión de 360 ° en 12 grados es proporcionada por una estación óptica-electrónica en un anillo giratorio, que incluye una cámara de luz natural con un zoom digital de x75 y un campo de visión de 320 ° y una cámara de imagen térmica con una resolución de 240x2 con un zoom digital de x36 y un campo de visión de XNUMX °. Estos parámetros son equivalentes a las características del periscopio panorámico del comandante. tanque; Las miras de "flecha" montadas coaxialmente con la ametralladora son una cámara de día con zoom óptico x26 y zoom digital x12 y una cámara termográfica con una resolución de 640x480 con un campo de visión de 47 ° FoV y zoom digital x4, que permite apuntar de noche o en malas condiciones; El telémetro láser mide la distancia al objetivo y lo transmite al sistema de control de incendios (LMS).
Se puede agregar un sistema de definición de disparo para proporcionar al LMS datos de destino. El "piloto" se basa en cámaras de día / noche delanteras y traseras con un campo de visión 95 °. El tiempo de trabajo varía de tres a doce horas dependiendo de la tarea realizada; El modo de reposo integrado le permite ahorrar energía de la batería al aumentar la vida útil de la batería hasta una semana. Los maars se pueden controlar mediante el controlador táctico QinetiQ Tactical Robotic Controller, común a la mayoría de los robots de la empresa, o mediante la computadora portátil Toughbook Laptop Controller. El sistema siempre es controlado por el operador, que puede apagar la alimentación instantáneamente con un botón especial en el controlador de mano. Actualmente, cinco unidades de Maars están probando el Cuerpo de Marines de EE. UU., Que trata de descripciones de métodos técnico-tácticos basadas en la experiencia. En el futuro, QinetiQ está considerando trabajar en los comandos de voz para reducir la carga del operador.
Northrop Grumman: Basándose en el robot logístico Camel, Northrop Grumman desarrolló una plataforma armada bajo la designación Madss (Sistema de soporte de desmontaje de armados móviles - Sistema de soporte de infantería armada móvil). Debido a su gran carga útil, la plataforma es capaz de recibir armas de calibre medio, en este caso particular, la ametralladora 7,62-mm M240B instalada en el módulo de combate. También se ofrecen armas alternativas, como el lanzagranadas automático MN-40 de 19 mm, la ametralladora pesada M2, la ametralladora ligera M249, así como las pistolas 25 y 30 mm con un pequeño retroceso. También se pueden instalar sistemas no letales, por ejemplo, FN Herstal FN303.

Mobile Armed Dismount Support System o MADSS es una versión armada del robot Camel; en la foto durante pruebas de fuego

La compañía turca Gate Elektronik ha desarrollado Robas, que tiene cuatro pistas giratorias para superar varios obstáculos, incluidos los pasos.
Puerta Elektronik: Entre las plataformas pesadas, el robot Robas, desarrollado por la compañía turca Gate Elektronik, tiene una arquitectura bastante inusual. Se distingue por cuatro pistas acortadas, cada una accionada por un motor eléctrico conectado a una rueda dentada de accionamiento; la rueda dentada de tensión está cargada por resorte para una mejor tensión de oruga. Es inusual en el robot que cada uno de los motores le permita girar su oruga para cambiar el ángulo de ataque con el fin de superar de manera óptima los pasos, así como para cruzar obstáculos. El dispositivo Robas es capaz de superar la altura del obstáculo 800 mm.
Un juego de baterías garantiza un funcionamiento autónomo durante cuatro horas, el rango de acción máximo es 25 km y la velocidad máxima de 10 km / h. El rango desde la consola es de un kilómetro. La masa de un robot Robas vacío es 250 kg, y su capacidad de carga 150 kg. Esto le permite instalar diferentes tipos de sistemas, como armas estabilizadas, estaciones óptico-electrónicas, radares de vigilancia, kits de detección de minas, silenciadores, etc.


Las plataformas robóticas armadas TRP2 FOB de la compañía Oto Melara están cerca de sus calificaciones, pero pueden perder el tiempo de despliegue en Afganistán
Oto Melara: Mientras que el pequeño TRP3 NEC fue diseñado para unidades de infantería, el modelo Oto Melara TRP2 se creó como un sistema más pesado y eficiente que mejora las capacidades de inteligencia y recolección de información en las unidades de inteligencia del ejército italiano. Sin embargo, la situación en Afganistán, donde los riesgos para los soldados que vigilan las bases operativas avanzadas son muy altos, hizo necesario acelerar el proceso de creación de un robot armado diseñado para patrullar los perímetros de estas bases. TRP2 FOB (también conocido como TRP2 Combat) se modificó desde la plataforma existente, que ya incluía la mayoría de los parámetros requeridos, como la capacidad de desensamblar en módulos portátiles. Las orugas conducen motores eléctricos sin escobillas, lo que les permite alcanzar velocidades de 15 km / h. Las baterías de iones de litio duran cuatro horas. Además del sistema GPS / inercial, se instaló el primer módulo de navegación autónomo para sortear obstáculos, reduciendo significativamente la carga del operador, aunque es extremadamente necesario cuando se trabaja en el modo de navegación de punto intermedio.
Para aumentar la movilidad del robot cuando se mueve a lo largo de las escaleras, la longitud de la pista se incrementó en comparación con el prototipo anterior y se agregó un fuerte brazo de cola. El sistema está controlado por una unidad de control modular que consta de un joystick, una unidad de comunicación y una computadora endurecida. El operador no solo controla el movimiento del robot, sino que, lo que es más importante, es el responsable de abrir fuego desde el a bordo. armasComo regla general, este es el rifle de asalto Beretta ARX160 5,56 mm o la ametralladora ligera FN Minimi del mismo calibre o el lanzagranadas Beretta GLX40 de un solo disparo 160-mm. Detrás de él se instala un mástil, en un dispositivo giratorio en el que se adjunta una cámara con zoom, que se utiliza para capturar un objetivo, y una cámara de gran angular fija, que proporciona al operador una imagen del terreno por delante, así como la parte frontal del propio robot. Se instala una optoelectrónica de campo estrecho en el alojamiento de armas: a la izquierda está la cámara diurna y, a la derecha, está la cámara térmica sin refrigeración de DRS Technologies.
El sistema ha sido probado exhaustivamente en el campo de entrenamiento del ejército de Nettuno; se dispararon más de 3000 cartuchos de pequeño calibre y granadas 100. El robot TRP2 FOB está equipado con un mando a distancia para levantar armas automáticas, lo que le permite salir de la base con total seguridad, ya que el primer cartucho se introduce en la cámara solo cuando llega a la zona objetivo. En cuanto a la movilidad, el robot ya ha recorrido muchos kilómetros; Además, se probaron las posibilidades de superar el vado y se demostró un alcance de más de un kilómetro. Oto Melara ha organizado dos cursos de formación de instructores 40. Ocho de esos robots fueron ordenados por el ejército italiano, pero como la calificación de tipo se retrasó, solo se suministraron dos vehículos. Se esperaba una verificación técnica preliminar a fines de julio, después de lo cual se podría enviar un sistema a las unidades operativas para su prueba y el segundo para completar las pruebas de compatibilidad electromagnética. Dado que el contingente italiano pronto abandonará Afganistán, es poco probable que el robot TRP2 FOB se despliegue allí.

El punto medio del armamento del robot TRP2 FOB, que consiste en un arma automática 5,56-mm y un lanzador de granadas 40-mm de un solo disparo.

Aunque conserva la designación TRP2, el robot TRP2 Rista tiene un chasis completamente diferente, a diferencia del FOB TRP2; Cuenta con un kit de mini colibri touch de Selex ES.
El robot TRP2 RISTA (Reconocimiento, Inteligencia, Vigilancia y Adquisición de objetivos - inteligencia, recopilación de información, observación, detección y captura de un objetivo), también conocido como Caballería TRP2, tiene un chasis ligeramente diferente. Se distingue por una oruga en forma de trapecio invertido, que garantiza una buena movilidad al moverse por las escaleras. Dado que el robot está diseñado para realizar tareas de reconocimiento específicas, se puede desmontar en cada módulo que se lleva detrás de su espalda, con un peso inferior a 20 kg, lo que, si es necesario, permite que se abandone para ser transportado en automóvil hasta el punto de partida. El peso máximo de combate es de aproximadamente 90 kg y la velocidad de 15 km / h en una superficie plana. El equipo a bordo se presenta en la forma de una estación óptico-electrónica Mini Colibri de Selex ES, que se eleva en el brazo de un tipo de pantógrafo. El paquete del sensor incluye una cámara de imagen térmica no refrigerada con resolución 320x240 con campo de visión 4,6 °, una cámara CCD diaria con un campo de visión aumentado desde 2,4 ° a 46 ° y un telémetro láser con un rango de medición de 4000 que es seguro para los ojos. El brazo se puede rotar ± 180 °, y la cabeza del sensor tiene ángulos de inclinación ± 40 °. Este robot proporcionará capacidades de reconocimiento de corto alcance para la versión Freccia Explorer 8x8 de la máquina, que entrará en servicio con las unidades de reconocimiento del ejército italiano. La inteligencia de largo alcance se confía al UAV Horus de Oto Melara, que se puede lanzar desde el cañón de una pistola de calibre 120 mm o desde un tubo de luz del mismo calibre instalado en la versión de reconocimiento de Freccia Explorer.
Oto Melara también está desarrollando un robot TRP2 HD (Heavy Duty - condiciones de trabajo severas) con una máscara de aproximadamente 300 kg y una carga útil de 100 kg con la intención de reemplazar los sistemas existentes de eliminación de artefactos explosivos utilizados por las fuerzas armadas italianas. Una versión armada del modelo HD puede armarse con armas de calibre más grande, una ametralladora 7,62-mm u otros sistemas de armas. TRP2 HD también está parcialmente financiado por el Ministerio de Desarrollo Económico, ya que proporciona opciones de desarrollo y civiles.
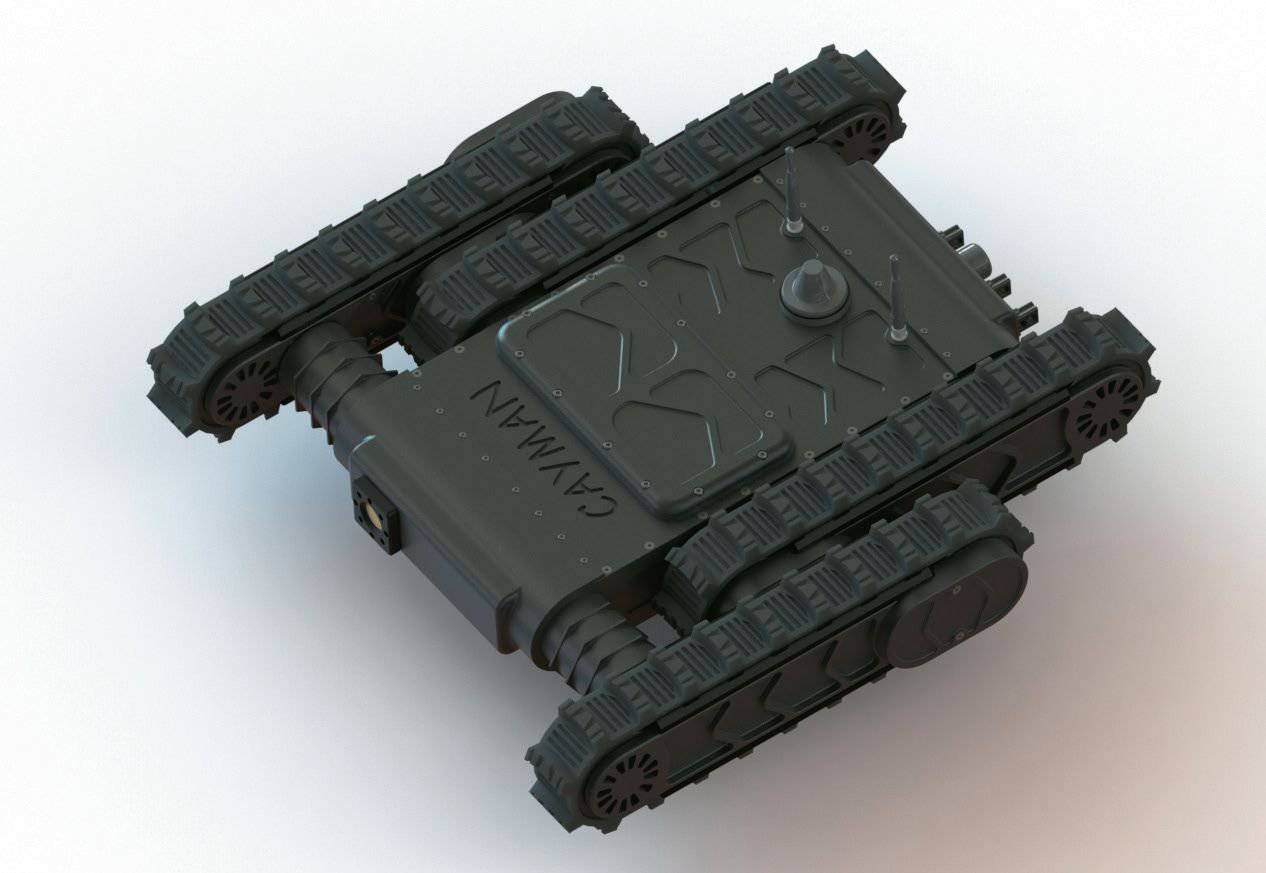
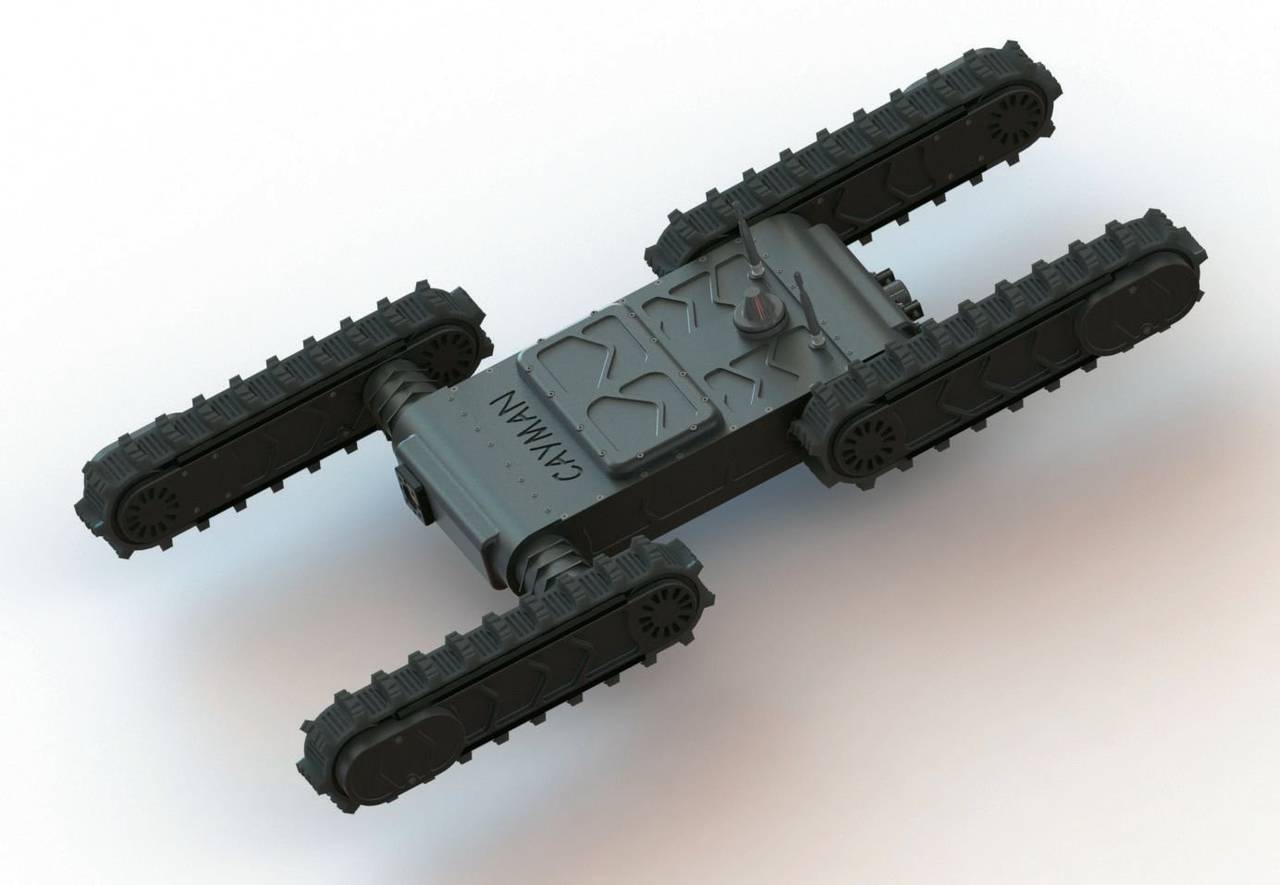

El robot Cayman se diferencia de Tecrdon por cuatro pistas giratorias, que le permiten superar obstáculos difíciles, mientras que su arquitectura permite reducir significativamente su tamaño durante el transporte.



Junto con su remolque, Quator de Tecdron puede transportar hasta 150 kg; Cifra significativa para el peso de la plataforma 29 kg
Tecdron: En la categoría de robots de tierra pesada, la empresa francesa Tecdron ofrece tres sistemas. El primero de estos, el robot Cayman tiene una arquitectura bastante peculiar, ya que cada una de sus cuatro pistas gira su propio motor eléctrico. Cuando están plegadas, las dos pistas traseras giran y se bloquean a lo largo del cuerpo del dispositivo, hechas de aleación de avión de acuerdo con las tradiciones de la compañía, mientras que las dos pistas delanteras se pliegan a lo largo de las pistas internas. Para que el robot pudiera moverse libremente a lo largo de los escalones, se instalaron dos motores en el chasis, girando las pistas. La solución de seguimiento inusual le permite obtener una movilidad óptima, el robot Cayman es capaz de hacer frente a las pendientes 55 ° y moverse a lo largo de las pendientes 50 °. La velocidad máxima es 6-8 km / h. El robot pesa 26 kg y puede aceptar dispositivos que pesen hasta 20 kg; El dispositivo es resistente al agua hasta una profundidad de un metro, y todas sus superficies tienen un tratamiento anticorrosión. Los dispositivos adicionales pueden ser integrados por Tecdron o por el cliente; La interfaz plug and play para este robot está actualmente en desarrollo.
Los sensores estándar incluyen una cámara frontal de gran angular con retroiluminación LED y micrófono; sin embargo, para mejorar la visibilidad, la segunda cámara se instala en un brazo corto con bisagras (la mano con la cámara se pliega en el cuerpo y, durante la operación, se eleva por encima del suelo hasta una altura de aproximadamente 350 mm). El canal de datos proporciona una línea de visión directa de un kilómetro (metros 300 en la ciudad). El operador usa una miniconsola con una pantalla de 7 pulgadas o una computadora portátil endurecida para controlarla. La batería de iones de litio 12 con una capacidad de 20 Ah proporciona tres horas de funcionamiento continuo, aunque esta segunda batería se duplica. Tecdron ofrece diversos equipos a bordo, como una cámara de video en un cabezal panorámico con aumento x36, una cámara de video termográfica, un detector de rango láser, sensores de gas, etc. Cayman hizo su debut en el Eurosatory 2014, pero los comentarios ya recibidos de usuarios potenciales indudablemente llevarán a la próxima versión mejorada.
El equivalente de rueda del Cayman en la cartera de Tecdron es el robot Quator 4x4 que pesa 29 kg y ruedas con un diámetro de 260 mm. El rendimiento de conducción es ligeramente peor que el análogo rastreado, pero aún así puede hacer frente a las pendientes 45 ° y las pendientes laterales 40 °. Puede superar obstáculos con una altura de 200 mm. Tiene el mismo conjunto de sensores que la oruga Cayman, la única diferencia está en la segunda cámara, instalada en la parte posterior. La batería de iones de litio 24 voltios tiene una gran capacidad de 30 Ah, su carga dura cuatro horas. Quator puede cargar un peso de hasta 50 kg y jalar un remolque con una carga de 100 kg. Un retenedor especial le permite conectar un remolque al robot usando la cámara trasera. Quator está equipado con el mismo canal de datos y puede aceptar el mismo hardware que el robot Cayman. El sistema está completamente implementado en la producción en masa, y el ejército francés es uno de sus usuarios. Para Quator, se está desarrollando una oruga, así como un brazo robótico, que se encuentra en las etapas finales de desarrollo.
El campeón de robots de Tecdron es el Quator XL 4x4. Aunque su nombre es similar al nombre del robot anterior, el prefijo XL habla sobre su peso 260 kg y la capacidad de llevar una carga de peso 500 kg. Su tarea principal es transportar equipo para soldados de infantería, pero se puede instalar equipo de reconocimiento en él. Cada rueda con un diámetro de 390 mm gira desde un motor eléctrico 1500 W, que, cuando se multiplica por 4, proporciona un buen esfuerzo de tracción y la capacidad de superar las pendientes de 40 ° y las pendientes laterales de 35 °. La altura de los obstáculos verticales es 300 mm, mientras que la velocidad máxima 15 km / h. Al igual que con el modelo anterior, el control remoto también es posible a una distancia de hasta un kilómetro, aunque un sistema semiautónomo se integrará en Quator XL, que aún se encuentra en la etapa de finalización. El robot tiene las características típicas de los robots Tecdron en cuanto a materiales de construcción, sensores e interfaces hombre-máquina. Quator XL es un producto completamente terminado, pero Tecrdon, sin embargo, está probando nuevas opciones de ruedas con el objetivo de mejorar el terreno en terrenos difíciles.
Para terrenos difíciles, Tecdron ofrece el Scarab LX, un sistema de orugas 215 kg con una capacidad de carga de 200 kg, capaz de superar los obstáculos verticales de 40 mm en altura. Este robot, aunque es adecuado para misiones de reconocimiento, probablemente sea particularmente útil en operaciones de desminado y para inspecciones de corto alcance en áreas peligrosas.

Scarab LX de Tecdron
Soporte logístico electrónico de Jordan: el nombre del fabricante nos dice que el sistema de seguimiento Lynx, ofrecido como plataforma multitarea, se desarrolló en Jordan. El chasis pesa 120 kg y es impulsado por dos motores eléctricos. Dos cámaras CCD a color con una unidad están instaladas en la parte delantera y trasera. Se ofrecen varios kits de equipos a bordo, que incluyen un brazo robótico, dispositivos de voladura, una carretilla elevadora, una cámara en una cabeza panorámica con zoom óptico x26 y zoom digital x12. La opción de remoción de minas se conoce como Lynx-E / J. El Lynx-C es una configuración de combate con un módulo de combate controlado a distancia, en el que instala un rifle M16, una ametralladora 7,62-mm o un lanzador de cohetes. Los robots Lynx forman parte del programa Jels Soldier Modernization Program de Jelson y están diseñados para integrarse en la estructura de gestión de la información de este sistema.
KADDB: Otra empresa jordana, KADDB, mostró en la exposición Sofex 2014 un nuevo robot multifunción multifuncional (MFR) en la configuración 6xXNNXX, en el que cada rueda gira su motor eléctrico. Las ruedas delanteras y traseras se extienden desde el casco, lo que permite superar obstáculos de facto con un ángulo de 6 °. MFR puede cruzar el vado con una profundidad de 90 mm, una zanja con un ancho de 150 mm y alcanzar velocidades de 450 km / h (velocidad reducida 12 km / h). La batería proporciona tres horas de trabajo. Además de las dos cámaras controladas estándar (una en la parte delantera y otra en la parte posterior) y un sistema de audio bidireccional con un micrófono y un altavoz, el robot MFR puede equiparse con varios conjuntos de equipos y armamentos.
En la exposición, el robot fue mostrado con una torreta. Los folletos publicitarios hablan sobre la gama de medidores 800, aunque los representantes de la compañía insisten en dos kilómetros. En la torreta se monta una cámara de orientación optron, que permite al operador medir la distancia en función de las dimensiones comparativas del objetivo: una persona, un automóvil pequeño, un automóvil grande, un edificio y, por lo tanto, prescindir de un buscador de rango láser. La torreta está armada con dos lanzacohetes RPG-32 Hashim de desarrollo ruso-jordano. El encendido piezoeléctrico garantiza el arranque de 200. Se puede agregar una ametralladora 7,62-mm. El robot MFR está todavía en la etapa de prototipo. Y aunque no está claro si este nuevo sistema de tierra reemplazará al robot mostrado en el pasado.


La compañía jordana KADDB ha desarrollado una serie de robots de tierra de diferentes categorías por peso. El robot MFR presentado en la exposición SOFEX 2014 estaba armado con dos lanzadores de cohetes (en la imagen de arriba)
Ejército ruso Rusia mostró recientemente un robot armado, que está diseñado para ser desplegado en fuerzas de misiles estratégicos para aumentar la seguridad de los sitios sensibles. El robot recibió la designación MRK-002-BG-57, se basa en un chasis con orugas, todo el sistema pesa aproximadamente 1100 kg. El nombre de la empresa desarrollador no fue nombrado; Lo más probable es que el robot tenga un sistema de propulsión híbrido con una reserva de energía de 250 km, una velocidad máxima de 35 km / hy una duración de 10 horas. La planta de energía se encuentra detrás del módulo de combate estabilizado que se instala en el centro de la plataforma robótica.

Con el fin de mejorar la seguridad de sus fuerzas de misiles estratégicos, Rusia ha desarrollado y armado la plataforma robótica rastreada MRK-002-BG-57 con una ametralladora pesada.
Según fuentes rusas, el robot es capaz de apuntar, rastrear y disparar a objetivos en modo automático y semiautomático. La torreta está equipada con una cámara de imagen térmica para el día, un detector de alcance láser y una computadora balística, un sistema de radar disponible para la observación a larga distancia. Las cámaras guiadas también están instaladas en el chasis. Se pueden montar varias armas en el robot, Kalashnikov 7,62x39 con cartuchos 500 o ametralladora 12,7-mm con cartuchos 30 o lanzador de granadas automático 30-mm, o AG-17A o AG-30. La comunicación en línea está garantizada a una distancia de hasta cinco kilómetros.
información