Proyecto de embarcación de defensa antisubmarina antisubmarina ACTUV (USA)
El desarrollo de submarinos hace demandas especiales en los sistemas antisubmarinos. Los nuevos complejos diseñados para buscar submarinos enemigos deben tener una serie de características especiales que le permitirán realizar las tareas de manera efectiva. Una innovación prometedora en esta área es el uso de sistemas de control remoto o máquinas totalmente autónomas. Se espera que los barcos antisubmarinos puedan mejorar significativamente el potencial de las flotas en la lucha contra los submarinos enemigos.
Desde el comienzo de 2010, la agencia DARPA y varias organizaciones relacionadas han estado desarrollando un proyecto para un prometedor sistema antisubmarino construido con barcos sin tripulación. Dicho equipo deberá llevar un conjunto de equipo especial y realizar patrullas en áreas de agua específicas. En caso de detección de objetos sospechosos, la información sobre ellos debe transmitirse al panel de control, y luego a los complejos de defensa antisubmarina responsables de la destrucción de los submarinos. Se espera que todos los trabajos se completen antes del final de la década actual, y los primeros barcos modelo nuevos sin tripulación y un conjunto de otros equipos se transferirán a la Marina de los EE. UU. Ya en el año 2018.
El desarrollo de un prometedor complejo antisubmarino se está llevando a cabo en el marco del programa ACTUV (buque no tripulado ASW Continuous Trail - “Vehículo no tripulado para trabajos largos” de la OLP). El objetivo principal de este proyecto es crear y probar un barco no tripulado adecuado para realizar tareas de búsqueda durante mucho tiempo. El principal requisito previo para esto es las serias limitaciones de los barcos y submarinos del diseño "tradicional". Se espera que la falta de personal y la automatización de todos los procesos eliminen las deficiencias inherentes a la tecnología "habitable".
Los principales requisitos para el complejo ACTUV son el rango de crucero máximo posible y la posibilidad de una larga patrulla en un área determinada. Un barco sin tripulación con equipo especial debe viajar varios miles de millas náuticas en una única estación de servicio y permanecer operativo durante varias semanas o meses. El barco debe operar en un modo completamente autónomo, y en los comandos del operador.
Inicialmente, el programa ACTUV se dividió en cuatro fases, durante las cuales se planificó llevar a cabo varias obras. Entonces, hasta la mitad de 2012, se suponía que debía llevar a cabo todos los estudios preliminares necesarios y luego formar el aspecto técnico exacto de un prometedor complejo antisubmarino. Desde la mitad del 2012, las etapas 2 3 y 4 debían comenzar. El propósito de la segunda etapa fue desarrollar el proyecto, la tercera, la construcción de prototipos de barcos y equipos relacionados, la cuarta, la prueba y el refinamiento de los prototipos del complejo. El inicio de la cuarta etapa fue planeado para la mitad de 2015.

La formación de la aparición del complejo PLO ACTUV prometedor se completó en el verano de 2012. A mediados de agosto, DARPA firmó un contrato con Science Applications International Corporation o SAIC (ahora Leidos Holdings). De acuerdo con este acuerdo, SAIC / Leidos debe implementar las fases segunda, tercera y cuarta del programa ACTUV. Para la ejecución del trabajo la empresa recibirá 58 millones de dólares.
Al mismo tiempo, se revelaron algunos detalles de los requisitos para el nuevo sistema antisubmarino, así como los detalles de la oferta de la compañía SAIC. Un complejo prospectivo debe tener un conjunto de equipos adecuados para la búsqueda de varios tipos de submarinos, incluidos los modernos no nucleares, que tienen algunos medios para reducir el ruido y otros factores de visibilidad. El barco no tripulado debe continuar en servicio durante los días 60-90. La mayor parte del complejo de trabajo debe realizar de forma independiente. El operador estará involucrado en las tareas solo en algunos casos.
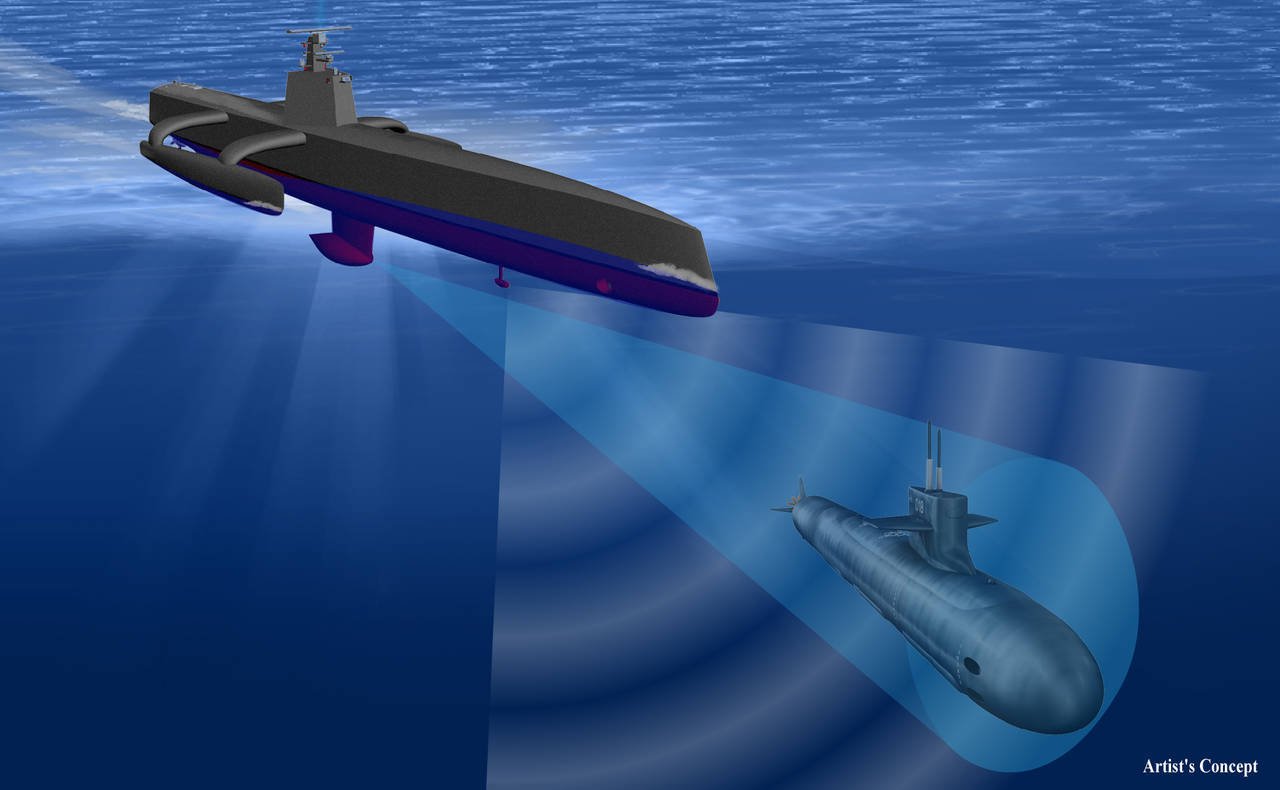
SAIC propuso utilizar una estación de sonar, un sistema óptico-electrónico con un canal de imagen térmica, una estación de radar y varios otros sistemas como parte del complejo ACTUV. Se espera que este conjunto de equipos permita que el barco ACTUV monitoree las aguas y detecte los submarinos del probable enemigo. Con el fin de mejorar el rendimiento, se propone construir un barco prometedor de acuerdo con el esquema "trimarán". Tal arquitectura del caso debe proporcionar la relación óptima de varias características.
El objetivo principal del complejo ACTUV debe ser los submarinos diesel-eléctricos y no nucleares del enemigo. En este caso, una ventaja importante del complejo será la posibilidad de una larga estancia en un área determinada. Los motores diesel requieren ascensos regulares para recargar las baterías, lo que en cierta medida debería facilitar su detección. Por lo tanto, un conjunto de equipo especial permitirá al barco sin tripulación buscar submarinos tanto bajo el agua como después del ascenso. En el caso de submarinos no nucleares equipados con una planta de energía independiente del aire, el complejo ACTUV tendrá que usar principalmente una estación hidroacústica y otros medios para detectar objetos bajo el agua.
Al desarrollar el proyecto ACTUV, se tuvo en cuenta la necesidad de reducir la visibilidad de los barcos antisubmarinos. Esta técnica no solo debe encontrar submarinos enemigos, sino que también debe ser invisible para ellos. De lo contrario, el barco sin tripulación puede ser destruido antes de que pueda transmitir información precisa sobre la ubicación del submarino encontrado. Para ello, el proyecto utilizó alguna tecnología de sigilo. Los barcos deben tener una forma especial formada por un conjunto de superficies planas, el casco estará hecho de materiales que apenas se notan para el radar, etc.
Se colocaron requisitos especiales en los sistemas de comunicación. La mayoría de las veces, los dispositivos ACTUV deben operar a una gran distancia de las bases en el modo automático. En una serie de situaciones, el operador debe participar en la operación del complejo. Por esta razón, un prometedor sistema antisubmarino necesita una comunicación bidireccional, adecuada para transmitir diversas informaciones, comandos y señales de video. Además, debe estar protegido contra la interferencia de los sistemas de guerra electrónica del enemigo. También es necesario tener en cuenta el hecho de que la transferencia principal de la embarcación puede detectarse mediante inteligencia electrónica.
SAIC se encargó de desarrollar un complejo de PLO prometedor que cumpla con los requisitos. Además de los requisitos relacionados con las características y capacidades de esta tecnología, el cliente solicitó algunas restricciones en el costo del sistema. Un barco sin tripulación, a pedido de DARPA, debería costar alrededor de 20 millones de dólares.
En marzo, 2013, se supo que Raytheon participaría en el desarrollo del proyecto ACTUV. El principal contratista de SAIC ordenó a esta organización que creara una nueva estación hidroacústica, que luego se convertiría en el principal medio para llevar a cabo misiones de combate. El sistema hidroacústico MS3, a solicitud del cliente, debe tener un modo de operación activo y pasivo y estar completamente alojado en el casco de la embarcación. La estación debe encontrar submarinos, torpedos y varios objetos submarinos de pequeño tamaño.
Un poco más tarde, se anunció que SAIC había firmado un acuerdo con OpenClovis Solutions, Inc. Este último se dedica al desarrollo de sistemas de control para diversos equipos. Como parte del proyecto ACTUV, OpenClovis Solutions, Inc. Responsable de crear una nueva versión de la plataforma SAFPlus. Según los informes, dicho sistema gestionará la interacción de varios barcos no tripulados ACTUV cuando trabajen juntos en modo automático.
En 2013, algunos cambios han ocurrido en SAIC. Lo más notable es el cambio de nombre. Bajo el nuevo nombre, Leidos, la compañía continuó trabajando en el programa ACTUV. En el verano de 2014, los especialistas de la compañía completaron el diseño de un prometedor sistema antisubmarino y presentaron el proyecto al cliente. A principios de julio, se anunció el inminente inicio de la construcción de un barco experimentado y un conjunto de equipos relacionados. La construcción de un barco experimentado se dio 15 meses.
En paralelo con la construcción del prototipo de barco, Leidos comenzó a probar el demostrador de tecnología. El barco piloto con una longitud de pies 32 (9,7 m) estaba equipado con un conjunto de sensores y equipo de control. El equipo a bordo del demostrador de tecnología podría trabajar fuera de línea o ejecutar los comandos del operador. Es curioso que durante las pruebas del prototipo reducido no solo se estudiaron las características del control remoto y autónomo. Estudié por separado la posibilidad de automatización de conformidad con el Reglamento internacional para prevenir colisiones en el mar. La ausencia de una tripulación no es una razón para el incumplimiento de las normas y reglas internacionales. Los futuros barcos ACTUV deben seguir las reglas de navegación. Además del demostrador de tecnología en tales pruebas, se utilizó otro bote, imitando el barco con el que es necesario dispersarse.
En noviembre del año pasado, se completaron las pruebas del primer prototipo de barco simplificado, equipado solo con sistemas de control. Durante el 42 del día, los expertos realizaron alrededor de 26 miles de pruebas, durante las cuales el barco recorrió varias rutas, superó los canales estrechos y se separó de otros barcos en diferentes recorridos. La automatización del control usado mostró sus capacidades. Durante las pruebas y el refinamiento, fue posible "enseñar" la automática del barco para corregir la conducción.
A principios de este año comenzaron nuevas pruebas. Esta vez la plataforma para la construcción del prototipo fue el bote 42-foot. A mediados de enero, tuvo lugar una de las etapas de prueba más interesantes. Un barco experimentado viajó de forma independiente una distancia de aproximadamente 35 millas náuticas, pasando de Gulfport a Pascagoula (Mississippi). Durante este viaje, el barco determinó de forma independiente su ubicación y la ruta necesaria. Además, los dispositivos automáticos de acuerdo con todas las reglas existentes evitaron colisiones con otros buques y otros objetos.
Hasta la fecha, la apariencia general y la composición del equipo de un prometedor barco antisubmarino ha sido completamente determinada. Además, la principal herramienta técnica del complejo ACTUV recibió su propio nombre: Sea Hunter ("Sea Hunter"). La mayor parte de la información sobre este barco, en particular la composición exacta del equipo objetivo, permanece clasificada. Sin embargo, algunos datos ya han sido publicados.
El barco ACTUV Sea Hunter tendrá una longitud de cuerpo alargada de pies 130 (aproximadamente 40 m). Para reducir la visibilidad del radar, el casco tendrá una forma formada por varios paneles rectilíneos. La mayoría de los equipos estarán ubicados dentro de la caja. Parte del equipo debe ser renderizado en una pequeña superestructura. Tendrá un pequeño tamaño y forma formada por varios planos. Para mejorar la navegabilidad, el barco es un trimarán con pequeños estabilizadores a bordo instalados en vigas horizontales. Se espera que este diseño permita mantener un rendimiento aceptable en presencia de un cuerpo suficientemente largo y estrecho.
En la superestructura de la embarcación se colocarán equipos para monitorear la situación de la superficie. Para este propósito, se planea utilizar un sistema óptico-electrónico con una cámara de video y una cámara termográfica, así como, posiblemente, una estación de radar. En la parte submarina del casco debe ubicarse la estación hidroacústica de la antena. La estación MS3 en sí debe tener dos modos de funcionamiento: pasivo y activo. En el primero, solo recibirá señales, en el segundo, funcionará según el principio de un sonar.
Las características del "Sea Hunter" aún no han sido anunciadas. Solo se sabe que un barco de este tipo podrá patrullar los días de 60-90 y superar las millas náuticas de 3300 sin reabastecimiento y mantenimiento. Se puede suponer que durante la patrulla el barco antisubmarino se moverá a una velocidad de no más de nudos 5-7. Esto aumentará el rango de crucero y la duración de las patrullas debido a la economía de combustible, y tampoco interferirá con el funcionamiento de la estación de sonar con el ruido de sus propias hélices.
Según algunos datos, la automatización del barco antisubmarino controlará todos los procesos, así como también hará parte del trabajo para el operador del complejo. En particular, podrá analizar el ruido del submarino detectado y determinar su tipo, dando a la consola no solo las coordenadas del objetivo detectado, sino también sus otros parámetros. Por lo tanto, la participación del operador en el trabajo del complejo se puede reducir al mínimo necesario.
Leidos está actualmente terminando la construcción del barco piloto de ACTUV Sea Hunter. Las pruebas de este prototipo deberían comenzar en el verano de 2015. Dado que el funcionamiento de algunos sistemas ya se ha estudiado utilizando prototipos anteriores, la tarea principal de los evaluadores será probar y probar el equipo objetivo: estación hidroacústica, equipo de comunicaciones, etc. La celebración de la cuarta etapa, durante la cual se planea probar y refinar el prototipo de una embarcación antisubmar completa, se otorga por varios años. Se planea construir el primer ACTUV Sea Hunter en serie y transferirlo a las fuerzas navales en 2018.
En los materiales de los sitios:
http://darpa.mil/
http://navaldrones.com/
http://defense-update.com/
http://globalsecurity.org/
https://leidos.com/
información