El mundo del mañana: robots militares en una encrucijada.
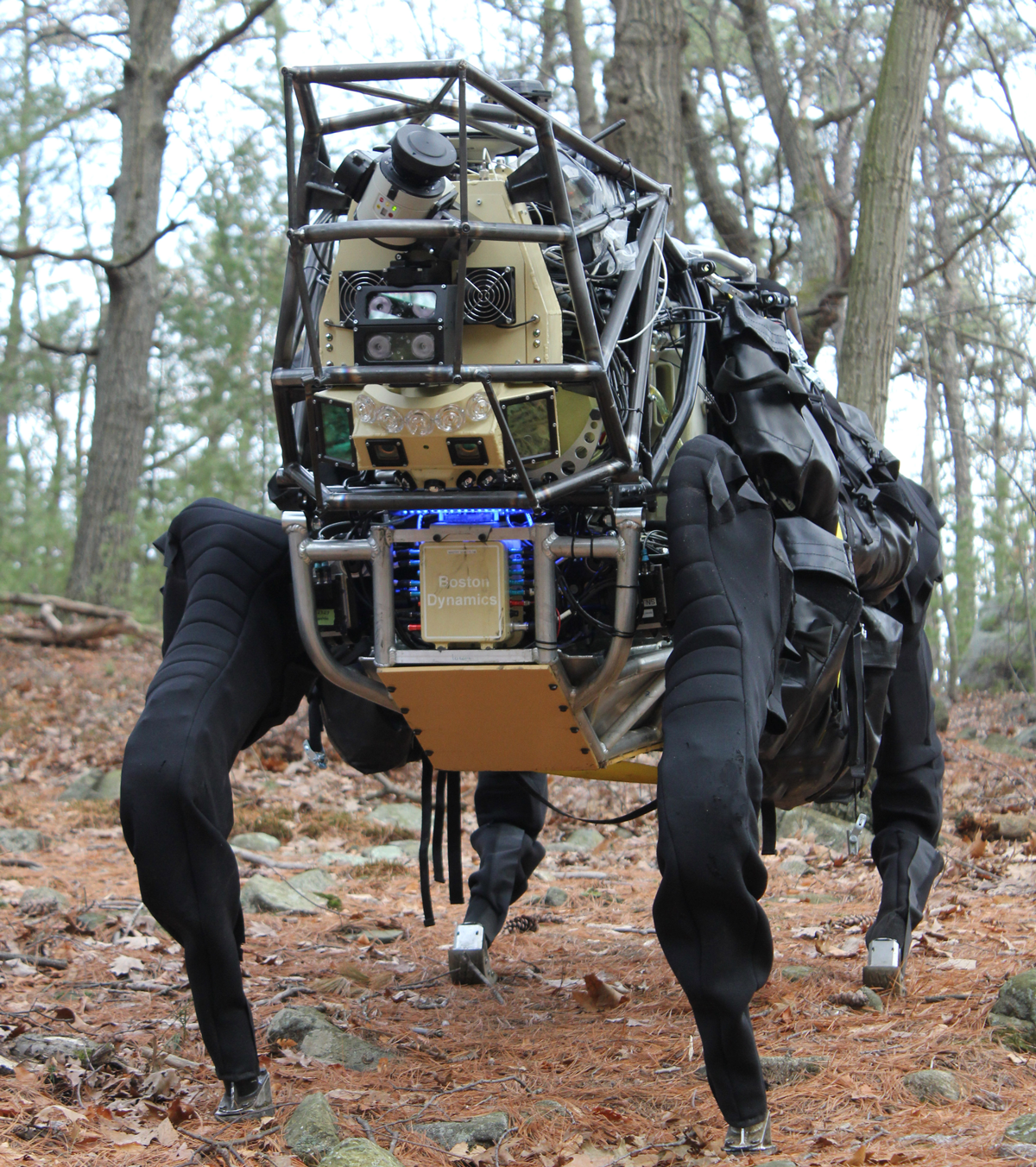
El robot LS3 es un nuevo enfoque para el problema de la movilidad y la capacidad de los sistemas para acompañar a las unidades implementadas.
La utilidad de los vehículos terrestres automáticos (ANA) en toda la gama de misiones de combate hoy en día ya no está en duda. Las operaciones de combate recientes han servido como campo de pruebas para varios sistemas y han expuesto las fortalezas y debilidades de las fuerzas armadas. robots. Considere una serie de programas existentes y las oportunidades que brindarán.
Después de varios años de operación intensiva, los usuarios y los comandantes militares aceptaron favorablemente los vehículos terrestres automáticos, pero en la actualidad la dirección de desarrollo de estas capacidades se encuentra en un punto de inflexión, ya que los sistemas ahora desplegados se eliminan del teatro de operaciones y se definen los requisitos futuros.
Las fuerzas armadas se enfrentan a decisiones difíciles: necesitan determinar cuál de los sistemas existentes deben dejarse, qué ya no se necesita, dónde se necesita el crecimiento a corto plazo y cómo planean desarrollar sistemas robóticos de próxima generación que prometen un cambio cualitativo en sus capacidades.
El ejército de los Estados Unidos hoy está armado con el mayor número de ANA de varios tipos y, por lo tanto, está claro que muchos ejércitos del mundo y la industria están observando de cerca sus planes.
Sin embargo, el primer problema que deben resolver todas las Fuerzas Armadas de los EE. UU. Es cómo lidiar con las plataformas actualmente desplegadas, muchas de las cuales se compraron en programas de financiamiento urgente, por ejemplo, en la prescripción conjunta urgente, y no de acuerdo con los planes oficiales.
"Tenemos muchos robots que hemos estado comprando durante varios años y estamos en lo que llamamos" trabajo ocasional ", explicó el teniente coronel Aaron Roberson, gerente de proyectos para grandes vehículos no tripulados en la Dirección para el Desarrollo de Proyectos Conjuntos de Sistemas Robotizados ( RSJPO). "No sabemos qué hacer con ellos, instamos al ejército a tomar una decisión, ya que no habrá medios para apoyarlos".
Los requisitos operativos del sistema llevaron al hecho de que se compraron y desplegaron tipos de dispositivos completamente diferentes. Si tal enfoque satisface las necesidades del momento, en la actualidad presenta un problema significativo en forma de sistemas no estándar. Roberson señaló además que el ejército decidirá qué hacer con ellos y esta decisión debe tomarse en serio: "Si decidimos deshacernos de ellos, debemos entender que después de comenzar el proceso, estos sistemas no se restaurarán, porque Vamos a deshacernos no solo de los sistemas en sí, sino también de todas sus partes y todo lo que hemos tenido que mantener durante varios años ".
Entre los muchos ANA utilizados por el ejército de EE. UU., Hay varias modificaciones de las familias Talon producidas por ORotiQ North America y PackBot por iRobot, los vehículos de carga, los RONS y el sistema de municiones remotas M160. Esta diversidad enfrenta al ejército de EE. UU. Uno de los mayores problemas: una pequeña redundancia en la administración y la infraestructura de soporte. La necesidad de evitar sistemas propietarios e introducir una arquitectura abierta es una línea roja en varias iniciativas. Esto es especialmente cierto en el caso del programa IOP (Perfil de Interoperabilidad - Parámetros de Interacción) del Ejército de los EE. UU. Y del programa de la Armada de los EE. UU. Para el sistema de eliminación de artefactos explosivos de prioridad avanzada AEODRS.


Robot para neutralización remota de municiones RONS
El objetivo del programa AEODRS es obtener las capacidades de la próxima generación mediante el desarrollo de una familia de dispositivos que consta de tres opciones: Incrementar 1, un sistema portátil para operaciones dispersas que pesan menos de 15,9 kg, realiza la exploración y evaluación de amenazas a una distancia de los medidores 100 y tiene capacidades limitadas de inspección y neutralización; Incremento de 2 que pesa hasta 66 kg para operaciones tácticas, transportado por dos personas, capaz de realizar reconocimientos y detectar amenazas a una distancia de 1 km; e Incremento 3: un sistema de remolque que pesa hasta 300 kg, capaz de levantar objetos pesados. Si las opciones Incrementar 2 y 3 están diseñadas para reemplazar los sistemas existentes, entonces la opción Incrementar 1 está diseñada para llenar el vacío tecnológico.
Según el jefe del departamento de robotización del Centro para el desarrollo de armas de superficie de la Armada, Michael Del Signoret, el programa AEODRS está diseñado para eliminar una serie de restricciones que se han encontrado en las plataformas operativas. "Estos sistemas están construidos en diferentes arquitecturas cerradas, como resultado, unidades de control de operador separadas, canales de suministro separados y un proceso de modernización muy complicado y engorroso".
Su objetivo también es resolver problemas como la autonomía limitada, el control remoto, las capacidades motoras limitadas y los grados de libertad de los manipuladores; falta de conciencia situacional; baja profundidad de percepción de las cámaras a bordo; y problemas con el rango de comunicación y el ancho de banda.
Lo último es de particular interés: "El sistema de comunicación tiene un rango más o menos decente ... pero el ancho del canal es limitado y, por lo tanto, algunas de las funciones avanzadas que queremos integrar, como la autonomía o la capacidad de proporcionar datos en masa, no se pueden obtener con el ancho de banda actual". ".
Del Signoret explicó que AEODRS buscará resolver estos problemas implementando una arquitectura común para toda la familia de sistemas. Cada opción está dividida en módulos y las interfaces entre ellos están determinadas por una arquitectura común, controlada por el estado, que se instalará y proporcionará física, eléctrica y lógica (tomada del estándar de arquitectura unificada para sistemas no tripulados Arquitectura conjunta para sistemas no tripulados [JAUS] / SAE AS-4 Standard) interfaces, requisitos para las características de los módulos, junto con información sobre la implementación.
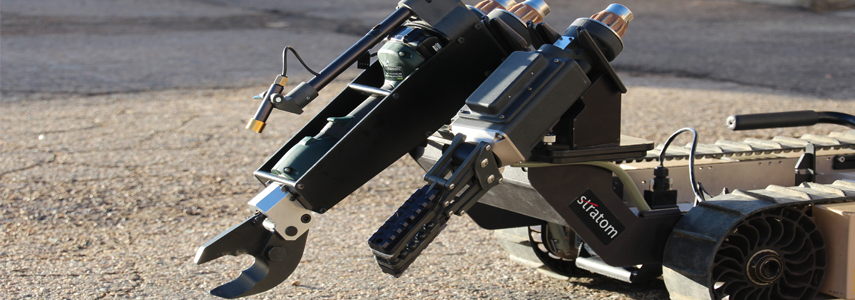

El ToolChanger de Stratom puede aceptar cinco herramientas diferentes y reemplazarlas automáticamente.
Sin embargo, AEODRS no es una cosa "en sí misma", sino que se crea para la interacción con otros sistemas. “Los programas AEODRS y IOP están estrechamente relacionados entre sí, y aquí la definición de que AEODRS es realmente una especificación de la iniciativa IOP es la más adecuada. "La arquitectura AEODRS en 95% es compatible con IOP y ahora estamos trabajando en la armonización de áreas que no son compatibles en 100%".
Las opciones Incrementar 1 y 2 incorporarán funciones más avanzadas, incluidas las habilidades de manipulación necesarias para resolver tareas que requieren una tarea con dos manos, navegación de punto intermedio, manipulaciones independientes, la capacidad de crear mapas de 2D y 3D en movimiento, cambios de herramientas independientes desde el contenedor integrado y extendido hasta las horas 12.
“Como resultado, podremos ofrecer a nuestros usuarios la tecnología mucho más rápido. Porque creemos que esto permitirá que más "jugadores" permanezcan en el juego. Las pequeñas empresas robóticas ahora podrán acceder a la arquitectura abierta. Queremos darle a la industria un modelo de depuración, luego ellos pueden desarrollar módulos basados en este modelo, venir y demostrarnos esta tecnología. Si esto es lo que se necesita, se integrará fácilmente en nuestros sistemas ".
Una serie de sistemas que potencialmente podrían cumplir con algunos de los requisitos definidos por AEODRS ya están en desarrollo, aunque pueden no estar incluidos específicamente en AEODRS. El brazo Adroit HDT Robotics se ha ensamblado con grados de libertad 16, de los cuales 10 tiene una unidad y 6 (bisagras de pasador lejano) se conducen a través de diferenciales. Una mano hábil pesa menos de 9 kg, puede levantar 22 kg y cada bisagra puede girar más rápido que 120 ° por segundo.
DADM (Dual Armed Dexterous Manipulator), desarrollado por Northrop Grumman, también conocido como Lobster, se está desarrollando en colaboración con Applied Minds, con sede en California. DADM permite que los componentes comerciales listos para usar se utilicen ampliamente, y todo el sistema consta de dos elementos principales: la plataforma DADM y el controlador del operador.
El manipulador se distingue por dos pinzas unidas a una carcasa común, cada una con grados de libertad 8 que tienen capacidades muy flexibles. La configuración se corresponde casi con el tamaño y el movimiento de una persona, mientras que los manipuladores están diseñados para realizar tareas altamente precisas, como desabrochar una bolsa o cortar cables pequeños. La unidad de control tiene un conjunto de controladores de operador configurados de manera similar, cuyos movimientos y datos de entrada copian los manipuladores. Se debe tener en cuenta que para mantener un alto nivel de capacidad de manipulación y realizar operaciones de alta precisión, para las cuales está diseñado DADM, el flujo de video 3-D se envía a la pantalla del operador montada en la cabeza. Cuenta con una cámara estéreo de alta resolución y brinda la profundidad de percepción necesaria para realizar tareas de manipulación precisas.
La compañía de sistemas robóticos Northrop Grumman también fabricó dos contenedores de herramientas. El sistema Cutlass del ejército británico tiene un contenedor que puede contener tres conjuntos diferentes para brazos robóticos. El sistema puede cambiar automáticamente estos conjuntos sin ninguna señal del operador, lo que elimina la necesidad de devolver el dispositivo al usuario para cambiar el cuerpo de trabajo.
IRobot ha desarrollado un sistema similar en colaboración con Stratom. El kit ToolChanger le permite colocar varios cuerpos de trabajo en el PackBot y cambiarlos automáticamente sin la intervención del operador. En la suspensión, instalada en la parte trasera, el dispositivo tiene capacidad para cinco instrumentos; kits típicos incluyen cortadores de alambre, rastrillos, dispositivos de voladura y manipuladores. La cabeza de conexión de la herramienta está integrada en el brazo del robot.
La iniciativa IOP, como el programa AEODRS, se centra principalmente en la uniformidad. Un especialista de Joint Ground Robotics Enterprise explicó que el IOP prevé su alineación adicional con un estándar que es compatible con los estándares STANAG de la OTAN y los estándares industriales estadounidenses y los estándares del Ministerio de Defensa MIL-SPEC. Además, se desarrollarán protocolos de comunicaciones militares para pequeños sistemas automatizados, y se llevará a cabo un estudio sobre los estándares de interfaz de la arquitectura de control general para dichos sistemas.
IOP y AEODRS no son las únicas actividades para introducir arquitecturas abiertas y estandarización. La compañía israelí G-NIUS ha desarrollado la tecnología desarrollada para su línea de ANA Guardium y AvantGuard, y en lugar de las "cajas" de 12 utilizadas anteriormente, integró los elementos robóticos en una sola unidad. Esta unidad principal se puede integrar en cualquier vehículo terrestre, lo que permite, después de algunas mejoras, convertirlo en un ANA. G-NIUS ha demostrado su capacidad para rehacer una amplia variedad de plataformas en una configuración sin cola. Hoy en día se trata de vehículos blindados BMP, M113 y Stryker, HMMWV, Ford F-350 camión y quads.
Mientras tanto, la compañía turca Aselsan ha desarrollado una familia de ANA con una plataforma base común. El sistema modular de Kaplan (tigre) con una arquitectura abierta es capaz de recibir varios conjuntos de equipos. Estos son principalmente sistemas de vigilancia y reconocimiento, sistemas para combatir artefactos explosivos improvisados, pero también son posibles configuraciones armadas.
Dado que el ejército es el mayor usuario de ANA en los Estados Unidos, es posible que tenga por delante los mayores problemas para determinar sus necesidades y formas de canalizar sus recursos.
El ejército ha dividido sus necesidades de plataforma en cuatro categorías: módulos portátiles, transportables, autopropulsados y complementarios. También cuentan con el desarrollo de un controlador universal para vehículos aéreos no tripulados a nivel de batallón e inferior, incluidos pequeños no tripulados aviación complejos
El teniente coronel Stuart Hetfield, jefe de la unidad de Soldier Systems y Unmanned Ground Systems, explicó que el ejército había planeado con anticipación las necesidades a largo plazo para los años 30 a fin de garantizar que todos los proyectos desarrollados dentro de los presupuestos de cinco años se hubieran completado.
La visión estratégica del ejército sobre este tema contempla la creación de fuerzas modernizadas formadas por grupos tripulados y tripulados con una mejor defensa, estabilidad de combate y capacidad de supervivencia. También reducirá la carga física y cognitiva de los soldados, utilizará nuevas tácticas y aumentará las capacidades de los soldados.
Según Hatfield, el ejército logrará esto mediante la reconstrucción y el mantenimiento del programa de emergencia seleccionado antes de la implementación de los programas planificados; reducción de costos debido a la uniformidad dentro de las clases; uso de tecnologías comerciales confeccionadas; la progresiva introducción de la autonomía en unidades; y finalmente, a través de la retroalimentación de los usuarios, que es una parte integral del proceso de desarrollo de la tecnología.
El ejército dividió todo su trabajo en programas actuales, emergentes y futuros, cada uno con diferentes grados de preparación y financiamiento. Los empleos actuales financiados incluyen el MTRS Incremento 1, RONS y M160, mientras que las necesidades emergentes (sin garantía de finalización) incluyen el Programa de mejora de robótica (REP).
El REP se copia del Programa de mejora del soldado (SEP), y está programado para comenzar en el año 2015. Bajo este programa, se abrirá la financiación para que el ejército adquiera productos comerciales terminados y sistemas experimentales terminados, que, después de la evaluación, pueden recibir el estado de transición a un programa planificado o el estado de contenido de un programa planificado. El teniente coronel Hatfield dijo que esto se debía a las preocupaciones de la industria de que había demasiadas manifestaciones sin ningún retorno de la inversión. "Este no es un boleto de oro para el programa planeado, pero al menos brinda cierto retorno de la inversión en el arduo trabajo realizado".
Otros objetivos a corto plazo (2015-2020) y a mediano plazo (2012-2030) incluyen un nuevo micro-ANA, Sistemas robóticos comunes-Sistemas robóticos comunes individuales (CRS-I), un Controlador táctico robótico táctico (TRC) y un sistema multipropósito para el transporte de equipos de compartimentos. Equipo de Transporte Multiuso de Equipos (SMET).
Se está trabajando en un nuevo microsistema como parte del programa de kit de robótica ligera común (CLARK, por sus siglas en inglés) de Common Lightweight Robotics Kit (CLARK, por sus siglas en inglés) que lleva a cabo el departamento de desarrollo de doctrina y entrenamiento de combate de TRADOC. Bajo el programa CLARK, el departamento contará con un conjunto de pequeños sistemas robóticos que pueden realizar reconocimientos de corto alcance con diversos grados de autonomía. El conjunto completo incluirá un sensor de tierra desatendido, un micro-ANA y un micro-UAV (con características autónomas). La masa total de todos los componentes, incluido el controlador común, puede ser de aproximadamente 4,5 kg. El robot de reconocimiento ultraligero semiautónomo desarrollado Ultra Light Recon Robot (ULRR) está diseñado para cumplir el rol de micro-ANA.
CRS-I es un reemplazo para el programa AHA del ejército pequeño (pequeño UGV –SUGV), que se cerró en abril 2013. El ejército está buscando un sistema que tenga dos veces menos peso y dos veces menos costo en comparación con el SUGV, y está a la espera de la aprobación de este requisito.

Un vehículo de apoyo de combate controlado a distancia desde Uralvagonzavod fue suministrado al ejército ruso.
Descargar soldados en el nivel de destacamento es otra posible área de aplicación para los sistemas sin tripulación. “Enviamos el sistema de transporte de vehículos SMSS (Lockheed Martin Squad Mission Support) a Afganistán; El sistema semiautónomo sigue a los soldados a lo largo del campo de batalla y lleva su equipo. Sin embargo, en la Oficina de Pruebas y Evaluación armas y el equipo militar informó que no confían en el sistema y, por lo tanto, no puede funcionar en modo semiautónomo. Llegó a la escena e inmediatamente recibimos quejas de que las baterías del control remoto estaban agotadas y que el sistema no era conveniente en la operación. Bueno, el diseño del sistema tenía sus inconvenientes. El control remoto resultó ser redundante, este es un modo innecesario que debe usar cuando el dispositivo no lo sigue. Esto cambió completamente la mente acerca de él y su percepción de los soldados. El aparato no descargaba a los soldados; es un esfuerzo cognitivo y físico porque tienen que poner sus armas, tomar el control remoto y controlar el sistema, que en realidad tiene que seguirlos por su cuenta. ¿Por qué sucedió esto? Porque aquellos que evaluaron y experimentaron este sistema no tenían confianza en él ”.
Sin embargo, el desarrollo de SMSS no se ha completado; las pruebas del sistema continúan en una serie de roles, incluido el trabajo en conjunto con UAV. Fusión de ANA y zumbido es un objetivo especial del ejército estadounidense.
Entre otros sistemas importantes en la lista del ejército, existen sistemas para limpiar rutas del Sistema de Interrogación y Despeje de Rutas Tipo 1 y 2, que le permiten controlar de forma remota el Excavador de Alta Movilidad y las máquinas RG-31 (ambos están equipados con diferentes equipos y dispositivos de ingeniería para combatir el VCA) respectivamente Sistema de detección de minas en el sistema de detección Husky Mounted (HMDS). HMDS es un programa operativo, dentro del cual se desarrolla un sistema de control semiautónomo del complejo Husky desde una distancia segura.
La certificación y las medidas de seguridad existentes pueden obstaculizar significativamente el despliegue de ANA grandes, especialmente sistemas adicionales. “Nada es perfecto, nunca podemos desplegar sistemas terrestres no tripulados y máquinas autónomas y esperar de ellos una operación sin problemas. Pero tenemos que desarrollar esta confianza, para superar esta barrera cultural entre lo que esperamos de una persona y el de una máquina ".
Esto puede causar problemas para el CDD del Sistema Autónomo de Movilidad Autónoma (ahora conocido como Operaciones de Convoy Autónomo - ACO). ACO es un kit opcional diseñado para transformar las plataformas de tripulación existentes en plataformas no tripuladas. "Creo que este es un proyecto muy exitoso, pero hay problemas ... No creo que sea un problema de tecnología en el contexto de si estamos listos para ir de esta manera". "Veo un problema en cómo lo usaremos, cómo lo certificaremos, cómo lo haremos seguro, porque los evaluadores solo saben cómo probar un camión con una persona adentro", explicó el teniente coronel Roberson.
Muchas de las oportunidades futuras que el ejército quería tener se desarrollaron como parte del programa cancelado FCS (Sistemas de combate del futuro). De acuerdo con ello, se desarrolló una plataforma robótica común MULE (Utilidad / logística multifunción y equipo), que podría reconfigurarse para diversas tareas, incluida una plataforma de apoyo en combate. Después de la abolición del FCS, el ejército continuó desarrollando una versión de combate en forma de una plataforma robótica armada (luz) ARV-A (L) (Armed Robotic Vehicle-Assault (light)), que, sin embargo, también se colocó en el estante.
Mientras que el Ejército de los EE. UU. Mantiene la necesidad de un ANA de combate táctico prometedor, en otros ejércitos tales sistemas ya están en servicio. Varios modelos de la compañía ANA G-NIUS pueden tomar armas, y Uralvagonzavod desarrolló un sistema de seguimiento, que se colocó en el ejército ruso.
Está diseñado para vigilancia y reconocimiento, así como para apoyo de combate directo e indirecto. El dispositivo está equipado con una instalación de armas giroscópicas y un conjunto de dispositivos ópticos electrónicos e infrarrojos. Según la compañía, el dispositivo puede operar a una distancia de 5 km y moverse a una velocidad de hasta 35 km / h; También se reporta un sistema de comunicación cifrado.
Si bien la movilidad de las plataformas básicas puede ser una de las barreras de baja tecnología que deben superarse, la solución a este problema es muy importante. "Desde mi punto de vista, la movilidad radica en la pregunta" ¿Puede la plataforma mantener el ritmo de una unidad o soldado, a quien realmente se le da el sistema? "... Miro ampliamente. No puedo decir con seguridad que el sistema deba tener ruedas, orugas o patas. "Este no es mi negocio, mi negocio es mirar las necesidades, mirar la situación y proponer un sistema que funcione en esta situación", dijo el teniente coronel Roberson.
Esto no es solo un problema para los sistemas más grandes diseñados para soportar unidades, como el sistema de soporte Legged Squad del sistema de soporte de piernas Leggings. Esto también afecta a los sistemas pequeños. El teniente coronel Hatfield explicó: “La movilidad parece ser el principal problema para todos estos sistemas, especialmente debido al hecho de que vamos a pasar a micro y nanoescala. Para un micro-ANA o un robot abandonado, todo lo que está en camino es un obstáculo, pero si pudiera flotar sobre el piso por un metro o dos, entonces podría haber hecho mucho y abrir nuevos mundos. Aquí el límite entre el aire y la tierra desaparece ".
Epílogo
Mercado americano de vehículos terrestres automáticos.
La retirada de tropas de Irak y Afganistán, así como la revisión radical del Ejército de los EE. UU. En febrero de 2013, causaron un rápido descenso en el mercado de usuarios finales de ANA. De acuerdo con el análisis, se planea transferir 2469 ANA a otras estructuras y dejar las plataformas 2700 para la modernización y restauración.
En marzo, 2014 se agregó al presupuesto de Pentagon 2015 para el software robótico de combate del Sistema de Soporte de Combate Robótico (RCSS), que contempla la compra de M160, Man Transportable Robot System (MTRS) Inc. II y el Sistema de Integración de Despeje Robótico (RCIS) ). El contrato también incluyó una actualización del MTRS, que brinda la capacidad de llevar a cabo el reconocimiento remoto y la neutralización de artículos explosivos en situaciones donde RONS es demasiado grande para esto.
Las actualizaciones incluyen el reemplazo de sistemas de comunicación y piezas y componentes inadecuados. Sin embargo, ha habido algunos cambios menores en la financiación del programa AEODRS. Se aplazó la fecha de inicio de la producción; La solución para Increment 1 se planeó para la mitad del 2015 del año, el inicio de la producción al final del 2016 del año y la implementación del programa de mejora continua se extendió hasta el final del 2019 del año.
El proyecto sobre sistemas de tierra robotizados, Robotic Ground Systems, en el que se desarrollan y demuestran tecnologías autónomas, sufrió una pequeña reducción en la financiación. Se ha producido una reducción significativa en el proyecto TS2 / Robotics Technology, que crea, evalúa y estudia tecnologías autónomas que permiten a los robots contribuir a tareas militares.
Se lanzó un nuevo programa para el vehículo terrestre automático táctico Vehículo terrestre no tripulado táctico (TUGV), que incorporó la funcionalidad del sistema robótico común Common Robotic System (Individual) y varios otros requisitos emergentes para el desarrollo y prueba de sistemas robóticos.
Como resultado de todos estos cambios, el tamaño y la estructura del mercado cambiaron radicalmente. Los últimos cinco años han estado dominados por las ventas para operaciones militares en Irak y Afganistán. En los próximos años 10, se pronostican ventas significativamente menores, pero con la posibilidad de un aumento después de 2016, debido a la investigación y el desarrollo planificados para las principales iniciativas, como TUGV. Se supone que en los últimos años del período proyectado de diez años, la producción crecerá, ya que la producción a gran escala de sistemas modulares de nueva generación comenzará a satisfacer la creciente demanda.
Materiales utilizados:
www.janes.com
www.dtic.mil
www.auvsi.org
www.irobot.com
www.northropgrumman.com
www.stratom.com
www.uvz.ru
información