Posiciones de disparo cerradas: cómo luchar con la artillería enemiga.
En Europa, las armas recorrieron el campo de batalla alrededor del siglo XIII, pero durante muchos siglos la artillería no jugó un papel decisivo en las batallas. Fue solo con el advenimiento de las guerras del siglo XX que el fuego de las armas se convirtió casi en el principal factor de daño. Luchar contra la artillería enemiga se ha convertido en uno de los objetivos clave para lograr la victoria.

El radar (radar) inventado después de la Segunda Guerra Mundial recorrió un largo camino hacia la mejora tecnológica durante varias décadas. Se mejoraron tanto las antenas como los algoritmos de procesamiento de datos. En la foto - radar multifuncional AN / MPQ-53 en forma expandida. Utilizado como parte de los sistemas de defensa aérea MM-104 Patriot.
Durante mucho tiempo, la artillería no se distinguió por su alto rango, y por lo tanto se ubicó en posiciones abiertas directamente en el campo de batalla. Establecer la ubicación de estas posiciones no planteaba ningún problema, y en los duelos de artillería, que a menudo precedían a las batallas del pie y las tropas ecuestres, él era el que mostraba más agilidad. Sin embargo, con el desarrollo de la tecnología de artillería, la gama de armas aumentó, los obuses, capaces de enviar un proyectil a lo largo de una empinada trayectoria (montada), se generalizaron. Así, fue posible ocultar su artillería detrás de los pliegues del relieve o en refugios especialmente construidos. Los episodios de lucha con disparos desde posiciones de disparo cerradas se notaron desde la guerra ruso-japonesa, y ya en la Primera Guerra Mundial, tácticas similares de usar armas se volvieron casi universales.

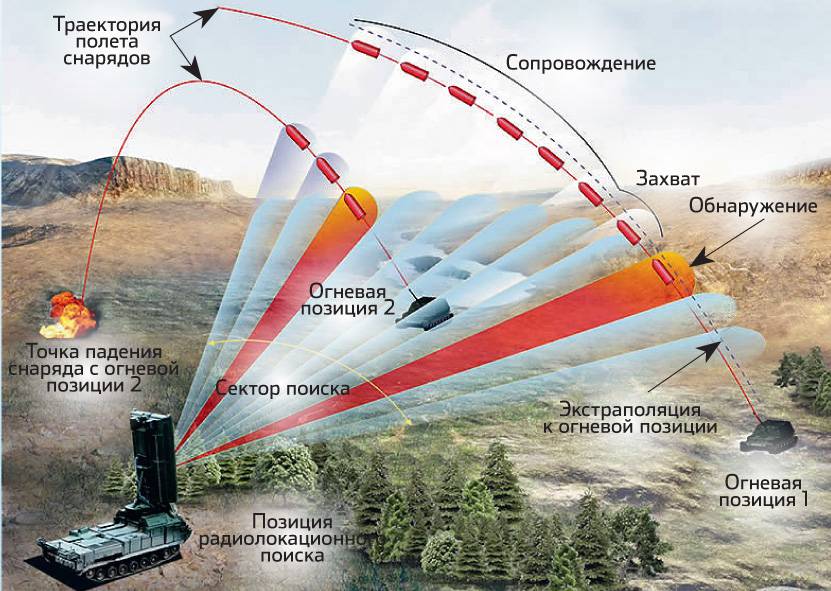
En la pantalla del radar
A diferencia de la estación de reconocimiento de sonido, que en sus cálculos se basa en la velocidad de la onda de sonido de un disparo, el radar anti-batería detecta directamente el cohete o proyectil y lo calcula por completo en varios puntos de la trayectoria, determinando tanto la ubicación de la posición de disparo del enemigo como la ubicación del proyectil.
Flash y piston
¿Qué pasa si el enemigo te arroja conchas y tú ni siquiera sabes dónde? La respuesta es simple: necesitas encontrar medios de reconocimiento, detectar las posiciones del enemigo y cubrirlas con fuego de retorno. Una de las opciones es realizar un reconocimiento desde el aire usando aviones o desde un globo, como se muestra en la famosa comedia "Bumbarash". Estas eran buenas maneras, aunque solo fuera porque era posible ver las baterías enemigas desde arriba antes de que comenzaran a disparar. Sin embargo, aún había pocos aviones en la Primera Guerra Mundial, y los globos aerostáticos resultaron ser demasiado dependientes de los caprichos del clima, principalmente en la dirección del viento. El arte del disfraz también se ha desarrollado. Por lo tanto, varios métodos para determinar la posición de las posiciones de artillería cerradas "sin separación del suelo" comenzaron a surgir. Por ejemplo, intentaron calcular la posición de las baterías observando los destellos. Al ver el destello o el humo de la pistola, se podía entender la dirección hacia la posición, y la distancia se calculó utilizando el "telémetro de sonido Boulanger". De hecho, era un dispositivo para medir el tiempo transcurrido desde el flash hasta el sonido de un disparo. En un tubo con un líquido viscoso, el pistón se hundió, y la escala del instrumento se graduó en sazhens (la velocidad del sonido se conocía desde hacía mucho tiempo). El valor de la división, frente a la cual estaba el pistón en el momento en que llegó el rugido, y correspondía a la distancia al cañón o al obús.

Zoo 1 (Rusia)
El nuevo complejo de radar ruso de contra-batería, que reemplazó al ARS-1 "Lynx", está diseñado para reconstruir las posiciones de las armas de fuego enemigas, calcular las trayectorias de proyectiles y misiles, ajustar el fuego, controlar el espacio aéreo y controlar el UAV.
Oídos de inteligencia
Pero esto, por supuesto, era una forma bastante primitiva. Un sistema de inteligencia de sonido más sofisticado comenzó a desarrollarse incluso antes que el Primer Capitán de la Sede Mundial del Ejército Ruso, Nikolai Albertovich Benoit. Pensó en usar receptores de sonido (membranas) ubicados a una gran distancia entre sí. Cuando el frente de onda de sonido pasó a través de ellos, comenzaron a oscilar, abrieron el contacto y detuvieron el contador de tiempo a través del dispositivo electromecánico. Sabiendo la diferencia en el tiempo de llegada del sonido de disparo en las membranas espaciadas y la posición relativa de los receptores entre sí, fue posible calcular la posición de la posición. Las unidades de reconocimiento de sonido que aplicaron el invento de Benoit mostraron buenos resultados, detectando las baterías del enemigo con una precisión lo suficientemente alta para esos momentos. Benoit no fue el único que trabajó en Rusia en sistemas de inteligencia de sonido. El sistema VZh también recibió una cierta distribución, llamada así por los desarrolladores de Volodkevich y Zheltov. Allí, tres soldados observadores actuaron como receptores de sonido, que ocuparon posiciones espaciadas con coordenadas exactamente medidas. Al escuchar el sonido de un disparo, cada soldado presionó un botón, enviando así una señal eléctrica a lo largo del cable a una estación de grabación instalada en la parte posterior. Una vez recibida la señal, el dispositivo dejó una marca en la cinta de papel en movimiento. Las marcas podrían usarse para determinar la diferencia en el tiempo de llegada de una onda de sonido a diferentes observadores, y luego se hicieron los cálculos. El sistema VZh también confirmó su rendimiento, aunque en mayor medida que el diseño de Benoit, dependía del factor humano, o más bien, de la velocidad de reacción del observador.

Shilem (Israel)
El tema de anotar las posiciones de disparo del enemigo, principalmente misiles, es tradicionalmente relevante para Israel. En este país, en particular, hay un sistema de defensa de misiles "Iron Dome". Usando el radar, el sistema calcula la trayectoria del misil disparado, determina el lugar de su caída y, si el proyectil es peligroso, le da las coordenadas a la derrota.
Vieja idea y nueva tecnología.
El equipo para el reconocimiento de sonido continuó desarrollándose después de la Primera Guerra Mundial en la URSS y en otros países del mundo. Desde las membranas pasaron a los micrófonos, desde la cronoscopia (es decir, la fijación de un solo momento de llegada de una onda de sonido) a la cronografía (grabación continua de sonido en relación con las coordenadas de tiempo). Con el desarrollo de la tecnología informática después de la Segunda Guerra Mundial, las computadoras se conectaron al cómputo de los datos recibidos.
En las 1980, el Ejército soviético recibió el modelo más avanzado de equipos para reconocimiento de sonido: el complejo AZK-7, desarrollado por el "Lightning" de Odessa SKB. El sistema se basaba en los coches ZIL-131 y consistía en un central y tres puntos con bases acústicas. Ella podría llevar a cabo el reconocimiento de proyectiles de artillería a una distancia de 16 - 20 km y morteros - hasta 8 km. Sin embargo, no importa cuán avanzado haya sido el progreso desde Nicholas Benoit, el reconocimiento sonométrico todavía tenía sus inconvenientes, como la dependencia de las condiciones climáticas y la baja precisión durante los disparos intensivos. Cuando el cañonazo retumba sin cesar, el equipo de reconocimiento de sonido se "pierde".
Sin embargo, la técnica de reconocimiento de sonido permanece en servicio en varios países, e incluso se están creando nuevas versiones de alta tecnología, como el Boomerang americano, que es capaz de determinar la ubicación de un francotirador que dispara un rifle, o cualquier persona que lance una máquina pequeña. оружие.

AN / TPQ-48 (EE. UU.)
La contrabatería de radar portátil móvil, diseñada para detectar las posiciones de mortero del enemigo, proporciona una visión general de los grados 360 y un rango de detección de más de 10 km. En el núcleo del diseño se encuentra una antena con PAR. El radar está integrado en las redes de control de batalla digital.
Locators en la escena
En cuanto a la lucha contra la batería, luego con los 1960 -1970-s, además de los sistemas de reconocimiento de sonido, comenzaron a desarrollar estaciones que permitían al enemigo detectar las posiciones de artillería del enemigo utilizando métodos de radar. El radar es capaz de detectar el proyectil disparado y en varios puntos de la trayectoria para calcular la ubicación del obús, el mortero o MLRS. La tarea más fácil fue resolver morteros con una trayectoria empinada con bisagras (cerca de la parábola). Era más difícil con los obuses, y el problema más importante estaba representado por las armas con una trayectoria plana.
En la URSS, el ARK-1 "Lynx", construido sobre el chasis de oruga flotante MT-Lbu, se convirtió en el primogénito. Se utilizó un emisor con una potencia de 200KW para irradiar proyectiles y misiles enemigos, y se usó un radar giratorio con forma de lente para recibir la señal reflejada. De acuerdo con los datos que describen un fragmento de la trayectoria, el complejo informático calculó el tipo de proyectil, la posición de la posición de artillería y el lugar previsto de la caída del proyectil. El complejo "Lynx" se usó durante las hostilidades en Afganistán, pero en las tierras altas se demostró que no era el mejor. Un problema aparte era la poderosa radiación, de la cual era necesario proteger al personal militar que trabajaba con el complejo.
En los Estados Unidos en los mismos años, el complejo Firefinder se desarrolló con un radar basado en una antena con un conjunto de antenas en fase. Los radares eran de dos tipos: AN / TPQ-36 y AN / TPQ-37, uno de ellos cerrado y otro de largo alcance. Fueron estas instalaciones las que se discutieron cuando se informó sobre el posible suministro de equipo de inteligencia estadounidense a Ucrania. Ahora estos radares se consideran obsoletos, y para reemplazarlos, la corporación Lockheed Martin crea un nuevo sistema, AN / TPQ-53. En 1986, apareció una tecnología más avanzada en Europa. Juntos, Gran Bretaña, Alemania y Francia crearon el complejo COBRA, que puede no solo detectar armas individuales, sino también analizar la ubicación de las baterías para detectar ataques efectivos. También una de las versiones más avanzadas de este tipo de equipo fue la sueca-noruega ARTHUR. En Rusia, en los últimos años, se ha completado el desarrollo del complejo Zoo-1M, que debería corresponder a los modelos extranjeros avanzados en términos de sus parámetros.

AN / TPQ-36 (EE. UU.)
Desarrollado por Hughes en las 1970-s en el marco del programa Firefinder, el radar móvil pudo finalmente detectar las posiciones de los morteros y los obuses, y las pistolas dispararon en una trayectoria suave. El rango para detectar posiciones de artillería es 18 km, para misiles - 24 km.
El desarrollo de una variedad de recursos de reconocimiento, que permiten detectar posiciones de artillería cerradas, hace que los artilleros no se sientan seguros y cambien la posición de las armas luego de una serie de disparos. Pero los radares anti-artillería también son bastante vulnerables. Después de todo, al iniciar la irradiación del objetivo, el localizador puede detectarse mediante inteligencia electrónica. Se puede aplicar un ataque de artillería y se pueden usar armas de guerra electrónicas contra él. Para proteger una instalación tan compleja y costosa se requieren medidas de seguridad. Primero, para el moderno radar de artillería, el tiempo de radiación es crítico. Cuanto más corto sea, es menos probable que se detecte. En segundo lugar, el radar debe usarse junto con otras medidas de reconocimiento, para ponerlo en acción precisamente cuando existe una amenaza de bombardeo. Y en tercer lugar, al igual que los artilleros, se prescribe una mayor movilidad a las unidades de radar. En la guerra moderna, como en los duelos de artillería del pasado, la prontitud no interferirá.

El radar (radar) inventado después de la Segunda Guerra Mundial recorrió un largo camino hacia la mejora tecnológica durante varias décadas. Se mejoraron tanto las antenas como los algoritmos de procesamiento de datos. En la foto - radar multifuncional AN / MPQ-53 en forma expandida. Utilizado como parte de los sistemas de defensa aérea MM-104 Patriot.
Durante mucho tiempo, la artillería no se distinguió por su alto rango, y por lo tanto se ubicó en posiciones abiertas directamente en el campo de batalla. Establecer la ubicación de estas posiciones no planteaba ningún problema, y en los duelos de artillería, que a menudo precedían a las batallas del pie y las tropas ecuestres, él era el que mostraba más agilidad. Sin embargo, con el desarrollo de la tecnología de artillería, la gama de armas aumentó, los obuses, capaces de enviar un proyectil a lo largo de una empinada trayectoria (montada), se generalizaron. Así, fue posible ocultar su artillería detrás de los pliegues del relieve o en refugios especialmente construidos. Los episodios de lucha con disparos desde posiciones de disparo cerradas se notaron desde la guerra ruso-japonesa, y ya en la Primera Guerra Mundial, tácticas similares de usar armas se volvieron casi universales.
En la pantalla del radar
A diferencia de la estación de reconocimiento de sonido, que en sus cálculos se basa en la velocidad de la onda de sonido de un disparo, el radar anti-batería detecta directamente el cohete o proyectil y lo calcula por completo en varios puntos de la trayectoria, determinando tanto la ubicación de la posición de disparo del enemigo como la ubicación del proyectil.
Flash y piston
¿Qué pasa si el enemigo te arroja conchas y tú ni siquiera sabes dónde? La respuesta es simple: necesitas encontrar medios de reconocimiento, detectar las posiciones del enemigo y cubrirlas con fuego de retorno. Una de las opciones es realizar un reconocimiento desde el aire usando aviones o desde un globo, como se muestra en la famosa comedia "Bumbarash". Estas eran buenas maneras, aunque solo fuera porque era posible ver las baterías enemigas desde arriba antes de que comenzaran a disparar. Sin embargo, aún había pocos aviones en la Primera Guerra Mundial, y los globos aerostáticos resultaron ser demasiado dependientes de los caprichos del clima, principalmente en la dirección del viento. El arte del disfraz también se ha desarrollado. Por lo tanto, varios métodos para determinar la posición de las posiciones de artillería cerradas "sin separación del suelo" comenzaron a surgir. Por ejemplo, intentaron calcular la posición de las baterías observando los destellos. Al ver el destello o el humo de la pistola, se podía entender la dirección hacia la posición, y la distancia se calculó utilizando el "telémetro de sonido Boulanger". De hecho, era un dispositivo para medir el tiempo transcurrido desde el flash hasta el sonido de un disparo. En un tubo con un líquido viscoso, el pistón se hundió, y la escala del instrumento se graduó en sazhens (la velocidad del sonido se conocía desde hacía mucho tiempo). El valor de la división, frente a la cual estaba el pistón en el momento en que llegó el rugido, y correspondía a la distancia al cañón o al obús.

Zoo 1 (Rusia)
El nuevo complejo de radar ruso de contra-batería, que reemplazó al ARS-1 "Lynx", está diseñado para reconstruir las posiciones de las armas de fuego enemigas, calcular las trayectorias de proyectiles y misiles, ajustar el fuego, controlar el espacio aéreo y controlar el UAV.
Oídos de inteligencia
Pero esto, por supuesto, era una forma bastante primitiva. Un sistema de inteligencia de sonido más sofisticado comenzó a desarrollarse incluso antes que el Primer Capitán de la Sede Mundial del Ejército Ruso, Nikolai Albertovich Benoit. Pensó en usar receptores de sonido (membranas) ubicados a una gran distancia entre sí. Cuando el frente de onda de sonido pasó a través de ellos, comenzaron a oscilar, abrieron el contacto y detuvieron el contador de tiempo a través del dispositivo electromecánico. Sabiendo la diferencia en el tiempo de llegada del sonido de disparo en las membranas espaciadas y la posición relativa de los receptores entre sí, fue posible calcular la posición de la posición. Las unidades de reconocimiento de sonido que aplicaron el invento de Benoit mostraron buenos resultados, detectando las baterías del enemigo con una precisión lo suficientemente alta para esos momentos. Benoit no fue el único que trabajó en Rusia en sistemas de inteligencia de sonido. El sistema VZh también recibió una cierta distribución, llamada así por los desarrolladores de Volodkevich y Zheltov. Allí, tres soldados observadores actuaron como receptores de sonido, que ocuparon posiciones espaciadas con coordenadas exactamente medidas. Al escuchar el sonido de un disparo, cada soldado presionó un botón, enviando así una señal eléctrica a lo largo del cable a una estación de grabación instalada en la parte posterior. Una vez recibida la señal, el dispositivo dejó una marca en la cinta de papel en movimiento. Las marcas podrían usarse para determinar la diferencia en el tiempo de llegada de una onda de sonido a diferentes observadores, y luego se hicieron los cálculos. El sistema VZh también confirmó su rendimiento, aunque en mayor medida que el diseño de Benoit, dependía del factor humano, o más bien, de la velocidad de reacción del observador.
Shilem (Israel)
El tema de anotar las posiciones de disparo del enemigo, principalmente misiles, es tradicionalmente relevante para Israel. En este país, en particular, hay un sistema de defensa de misiles "Iron Dome". Usando el radar, el sistema calcula la trayectoria del misil disparado, determina el lugar de su caída y, si el proyectil es peligroso, le da las coordenadas a la derrota.
Vieja idea y nueva tecnología.
El equipo para el reconocimiento de sonido continuó desarrollándose después de la Primera Guerra Mundial en la URSS y en otros países del mundo. Desde las membranas pasaron a los micrófonos, desde la cronoscopia (es decir, la fijación de un solo momento de llegada de una onda de sonido) a la cronografía (grabación continua de sonido en relación con las coordenadas de tiempo). Con el desarrollo de la tecnología informática después de la Segunda Guerra Mundial, las computadoras se conectaron al cómputo de los datos recibidos.
En las 1980, el Ejército soviético recibió el modelo más avanzado de equipos para reconocimiento de sonido: el complejo AZK-7, desarrollado por el "Lightning" de Odessa SKB. El sistema se basaba en los coches ZIL-131 y consistía en un central y tres puntos con bases acústicas. Ella podría llevar a cabo el reconocimiento de proyectiles de artillería a una distancia de 16 - 20 km y morteros - hasta 8 km. Sin embargo, no importa cuán avanzado haya sido el progreso desde Nicholas Benoit, el reconocimiento sonométrico todavía tenía sus inconvenientes, como la dependencia de las condiciones climáticas y la baja precisión durante los disparos intensivos. Cuando el cañonazo retumba sin cesar, el equipo de reconocimiento de sonido se "pierde".
Sin embargo, la técnica de reconocimiento de sonido permanece en servicio en varios países, e incluso se están creando nuevas versiones de alta tecnología, como el Boomerang americano, que es capaz de determinar la ubicación de un francotirador que dispara un rifle, o cualquier persona que lance una máquina pequeña. оружие.
AN / TPQ-48 (EE. UU.)
La contrabatería de radar portátil móvil, diseñada para detectar las posiciones de mortero del enemigo, proporciona una visión general de los grados 360 y un rango de detección de más de 10 km. En el núcleo del diseño se encuentra una antena con PAR. El radar está integrado en las redes de control de batalla digital.
Locators en la escena
En cuanto a la lucha contra la batería, luego con los 1960 -1970-s, además de los sistemas de reconocimiento de sonido, comenzaron a desarrollar estaciones que permitían al enemigo detectar las posiciones de artillería del enemigo utilizando métodos de radar. El radar es capaz de detectar el proyectil disparado y en varios puntos de la trayectoria para calcular la ubicación del obús, el mortero o MLRS. La tarea más fácil fue resolver morteros con una trayectoria empinada con bisagras (cerca de la parábola). Era más difícil con los obuses, y el problema más importante estaba representado por las armas con una trayectoria plana.
En la URSS, el ARK-1 "Lynx", construido sobre el chasis de oruga flotante MT-Lbu, se convirtió en el primogénito. Se utilizó un emisor con una potencia de 200KW para irradiar proyectiles y misiles enemigos, y se usó un radar giratorio con forma de lente para recibir la señal reflejada. De acuerdo con los datos que describen un fragmento de la trayectoria, el complejo informático calculó el tipo de proyectil, la posición de la posición de artillería y el lugar previsto de la caída del proyectil. El complejo "Lynx" se usó durante las hostilidades en Afganistán, pero en las tierras altas se demostró que no era el mejor. Un problema aparte era la poderosa radiación, de la cual era necesario proteger al personal militar que trabajaba con el complejo.
En los Estados Unidos en los mismos años, el complejo Firefinder se desarrolló con un radar basado en una antena con un conjunto de antenas en fase. Los radares eran de dos tipos: AN / TPQ-36 y AN / TPQ-37, uno de ellos cerrado y otro de largo alcance. Fueron estas instalaciones las que se discutieron cuando se informó sobre el posible suministro de equipo de inteligencia estadounidense a Ucrania. Ahora estos radares se consideran obsoletos, y para reemplazarlos, la corporación Lockheed Martin crea un nuevo sistema, AN / TPQ-53. En 1986, apareció una tecnología más avanzada en Europa. Juntos, Gran Bretaña, Alemania y Francia crearon el complejo COBRA, que puede no solo detectar armas individuales, sino también analizar la ubicación de las baterías para detectar ataques efectivos. También una de las versiones más avanzadas de este tipo de equipo fue la sueca-noruega ARTHUR. En Rusia, en los últimos años, se ha completado el desarrollo del complejo Zoo-1M, que debería corresponder a los modelos extranjeros avanzados en términos de sus parámetros.

AN / TPQ-36 (EE. UU.)
Desarrollado por Hughes en las 1970-s en el marco del programa Firefinder, el radar móvil pudo finalmente detectar las posiciones de los morteros y los obuses, y las pistolas dispararon en una trayectoria suave. El rango para detectar posiciones de artillería es 18 km, para misiles - 24 km.
El desarrollo de una variedad de recursos de reconocimiento, que permiten detectar posiciones de artillería cerradas, hace que los artilleros no se sientan seguros y cambien la posición de las armas luego de una serie de disparos. Pero los radares anti-artillería también son bastante vulnerables. Después de todo, al iniciar la irradiación del objetivo, el localizador puede detectarse mediante inteligencia electrónica. Se puede aplicar un ataque de artillería y se pueden usar armas de guerra electrónicas contra él. Para proteger una instalación tan compleja y costosa se requieren medidas de seguridad. Primero, para el moderno radar de artillería, el tiempo de radiación es crítico. Cuanto más corto sea, es menos probable que se detecte. En segundo lugar, el radar debe usarse junto con otras medidas de reconocimiento, para ponerlo en acción precisamente cuando existe una amenaza de bombardeo. Y en tercer lugar, al igual que los artilleros, se prescribe una mayor movilidad a las unidades de radar. En la guerra moderna, como en los duelos de artillería del pasado, la prontitud no interferirá.
- Oleg Makarov
- http://www.popmech.ru/weapon/236490-zakrytye-ognevye-pozitsii-kak-srazhatsya-s-artilleriey-vraga/
información