Teoría y práctica de los sistemas robóticos móviles terrestres.

El desarrollo de nuevas doctrinas operacionales, especialmente para hostilidades urbanas y conflictos asimétricos, requerirá nuevos sistemas y herramientas técnicas que reducirán las pérdidas entre los militares y los civiles. Esto es posible de implementar a través del desarrollo de SMRC, el uso de tecnologías avanzadas para monitorear y recopilar información, así como la inteligencia y la detección de blancos, la protección y el ataque de precisión. El SMRC, al igual que sus homólogos voladores, debido al amplio uso de las tecnologías robóticas más modernas, no tiene un operador humano a bordo.
Estos sistemas también son indispensables para trabajar en un entorno contaminado o para otras tareas "aburridas, sucias y peligrosas". La necesidad de desarrollar SMRK avanzado está conectada con la necesidad de usar sistemas no tripulados para soporte directo en el campo de batalla. Según algunos expertos militares, los vehículos deshabitados, cuyo nivel de autonomía aumentará constantemente, se convertirán en uno de los elementos tácticos más importantes en la estructura de las fuerzas terrestres modernas.

Complejo robótico basado en vehículo blindado TERRAMAX M-ATV para encabezar un convoy de vehículos no tripulados
Necesidades operativas y desarrollo de SMRK.
Al final de 2003, el Comando Central de los Estados Unidos emitió solicitudes urgentes e impacientes para contrarrestar la amenaza de los dispositivos explosivos improvisados (IED). La Organización de Sistemas Robóticos de Tierra JGRE (Joint Ground Robotics Enterprise) ha desarrollado un plan que podría proporcionar rápidamente un aumento significativo en las capacidades mediante el uso de pequeñas máquinas robóticas. Con el tiempo, estas tecnologías han evolucionado, se ha implementado un número creciente de sistemas y los usuarios han recibido prototipos avanzados para la evaluación. Como resultado, ha aumentado la cantidad de personal militar y unidades involucradas en el campo de la seguridad interna, que han aprendido a operar sistemas robóticos avanzados.
La Dirección de Investigación de Defensa Avanzada DARPA actualmente está realizando investigaciones sobre tecnologías de aprendizaje de máquinas robóticas basadas en sus desarrollos en el campo de la inteligencia artificial, así como el reconocimiento de las imágenes resultantes. Todas estas tecnologías, desarrolladas como parte del programa UPI (Integración de la percepción no tripulada - incorporando la percepción automática), pueden proporcionar una mejor comprensión del entorno / terreno con un vehículo con buena movilidad. El resultado de esta investigación fue una máquina llamada CRUSHER, cuya evaluación operacional comenzó en el año 2009; Desde entonces, se han realizado varios prototipos más.
El programa MPRS (Man-Portable Robotic System) se centra actualmente en el desarrollo de sistemas autónomos de navegación y prevención de colisiones para pequeños robots. También define, estudia y optimiza tecnologías diseñadas para aumentar el nivel de autonomía y funcionalidad de los sistemas robóticos. El programa RACS (Robotic for Agile Combat Support) desarrolla varias tecnologías robóticas para cumplir con las amenazas actuales y los requisitos operativos, así como con las necesidades y capacidades futuras. El programa RACS también desarrolla e integra tecnologías de automatización para varias misiones de combate y varias plataformas basadas en el concepto de una arquitectura común y características tan fundamentales como la movilidad, la velocidad, el control y la interacción de varios vehículos.
La participación de robots en las operaciones de combate modernas permite a las fuerzas armadas adquirir una experiencia invaluable en su operación. Surgieron varias instrucciones interesantes sobre el uso de vehículos aéreos no tripulados (UAV) y SMRK en un teatro operacional, y los organismos de planificación militar tienen la intención de estudiarlos detenidamente, incluida la gestión general de varias plataformas, el desarrollo de sistemas a bordo intercambiables que pueden instalarse tanto en UAV como en SMRK con el objetivo de expandir las capacidades globales, así como las nuevas tecnologías para el combate prometedor de sistemas deshabitados.
De acuerdo con el programa experimental ARCD (Active Range Clearance Developments), el desarrollo del enrutamiento activo de la ruta desarrollará el escenario denominado "aseguramiento de la seguridad de la zona por medios automáticos" en el que varios SMRC trabajarán junto con varios UAV. Además, se evaluarán las soluciones tecnológicas con respecto al uso de estaciones de radar en plataformas no tripuladas, una evaluación de la integración de los sistemas de control y monitoreo y la eficiencia general de los sistemas. Como parte del programa ARCD, la Fuerza Aérea de los EE. UU. Planea desarrollar las tecnologías necesarias para aumentar la eficiencia de las acciones conjuntas del SMRC y el UAV (esquemas de aeronaves y helicópteros), así como algoritmos para el funcionamiento sin problemas de los sensores en todas las plataformas involucradas, el intercambio de datos y datos de navegación. ciertos obstáculos
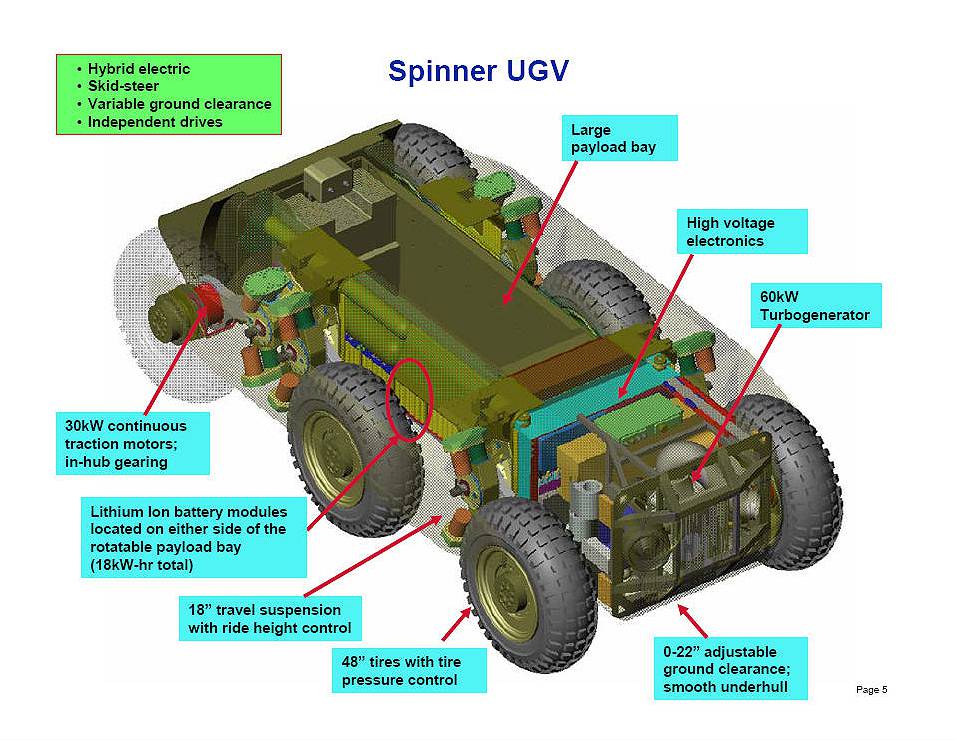
El diseño interno de componentes mecánicos, eléctricos y electrónicos SMRK SPINNER
Army Research Laboratory ARL (Army Research Laboratory) realiza experimentos como parte de sus programas de investigación para evaluar la sofisticación de la tecnología. Por ejemplo, ARL realiza experimentos que evalúan las capacidades de una SMRK totalmente autónoma para detectar y evitar el movimiento de automóviles y personas en movimiento. Además, el Centro para el espacio y los sistemas de armas navales de los estadounidenses flota realiza investigaciones sobre nuevas tecnologías robóticas y soluciones técnicas clave relacionadas, que incluyen mapeo autónomo, evitación de obstáculos, sistemas de comunicación avanzados y misiones conjuntas SMRK y UAV.
Todos estos experimentos con la participación simultánea de varias plataformas terrestres y aéreas se llevan a cabo en condiciones externas realistas caracterizadas por un terreno complejo y un conjunto de tareas realistas durante las cuales se evalúan las capacidades de todos los componentes y sistemas. Como parte de estos programas piloto (y la estrategia tecnológica correspondiente) en el desarrollo del SISM avanzado, se identificaron las siguientes áreas para maximizar el rendimiento de las inversiones futuras:
- el desarrollo tecnológico proporcionará la base tecnológica para los subsistemas y componentes y la integración correspondiente en los prototipos SMRC para pruebas de rendimiento;
- las compañías líderes en esta área desarrollarán tecnologías avanzadas necesarias para ampliar el alcance de la robotización, por ejemplo, al aumentar el rango del SMRK y al aumentar el rango de los canales de comunicación; y
- un programa de reducción de riesgos proporcionará el refinamiento de tecnologías avanzadas para un sistema particular y permitirá superar algunos problemas tecnológicos.
Gracias al desarrollo de estas tecnologías, los SMRK son potencialmente capaces de dar un salto revolucionario en la esfera militar, su uso reducirá las bajas y aumentará la efectividad del combate. Sin embargo, para lograr esto, deben poder trabajar de forma independiente, incluida la implementación de tareas complejas.


Un ejemplo de SMRK armado. AVANTGUARD Empresa israelí G-NIUS Sistemas de tierra no tripulados

Sistema robótico modular avanzado MAARS (Sistema robótico armado avanzado modular), armado con una ametralladora y lanzagranadas
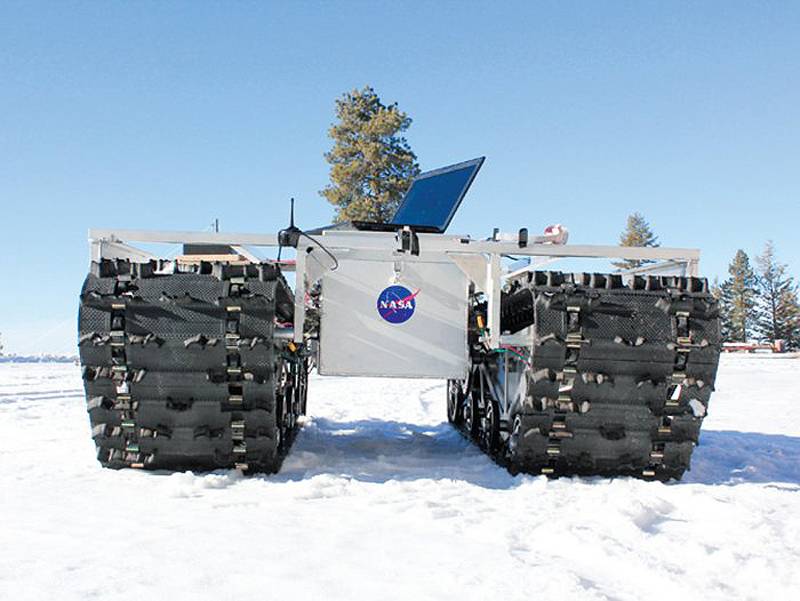
Diseñado por NASA SMRK GROVER en terreno nevado
Requisitos técnicos para SMRK avanzado
Los SMRC avanzados están diseñados y desarrollados para tareas militares y operan principalmente en condiciones peligrosas. Hoy en día, muchos países proporcionan investigación y desarrollo en el campo de los sistemas no tripulados robóticos capaces de funcionar en la mayoría de los casos en terrenos difíciles. Los SMRC modernos pueden enviar señales de video al operador, información sobre obstáculos, objetivos y otras variables que son interesantes desde un punto de vista táctico o, en el caso de los sistemas más avanzados, tomar decisiones completamente independientes. De hecho, estos sistemas pueden ser semiautónomos cuando los datos de navegación se usan junto con los sensores y comandos a bordo de un operador remoto para determinar la ruta. Un vehículo totalmente autónomo determina su propio rumbo, utilizando solo sensores a bordo para elaborar la ruta, pero el operador siempre tiene la oportunidad de tomar las decisiones específicas necesarias y tomar el control en situaciones críticas o cuando el automóvil está dañado.
Hoy en día, el SMRC moderno puede detectar, identificar, localizar y neutralizar rápidamente muchos tipos de amenazas, incluida la actividad del enemigo en condiciones de radiación, contaminación química o biológica en varios tipos de terreno. Al desarrollar SMRK moderno, el principal problema es la creación de un diseño funcionalmente eficiente. Los puntos clave incluyen el diseño mecánico, un conjunto de sensores a bordo y sistemas de navegación, interacción entre humanos y robots, movilidad, comunicación y consumo de energía / energía.
Los requisitos para la interacción entre el robot y los seres humanos incluyen interfaces de máquina-hombre altamente complejas y, por lo tanto, se deben desarrollar soluciones técnicas multimodales para interfaces seguras y amigables. La tecnología moderna de interacción entre un robot y una persona es muy compleja y requerirá muchas pruebas y evaluaciones en condiciones operativas realistas para lograr buenos niveles de confiabilidad, tanto en la interacción entre el hombre y el robot, como en la interacción del robot con el robot.

Armado con el desarrollo de SMRC de la compañía estonia MILREM.
El objetivo de los diseñadores es el desarrollo exitoso del SMRC, capaz de realizar su tarea día y noche en el complejo en el terreno. Para lograr la máxima eficiencia en cada situación específica, el SMRC debe poder moverse en todo tipo de terrenos con obstáculos a alta velocidad, con alta maniobrabilidad y cambiar rápidamente de dirección sin una reducción significativa de la velocidad. Los parámetros de diseño relacionados con la movilidad también incluyen características cinemáticas (principalmente la capacidad de mantener el contacto con el suelo en todas las condiciones). SMRC tiene, además de la ventaja de que no tiene las limitaciones inherentes al hombre, también la desventaja de integrar mecanismos complejos que pueden reemplazar los movimientos humanos. Los requisitos de diseño para la calidad de marcha deben integrarse con las tecnologías de percepción, así como con el desarrollo de sensores y software para obtener una buena movilidad y capacidad para sortear varios tipos de obstáculos.
Uno de los requisitos extremadamente importantes que determinan la alta movilidad es la capacidad de utilizar información sobre el entorno natural (escaladas, vegetación, piedras o agua), objetos hechos por el hombre (puentes, carreteras o edificios), clima y obstáculos del enemigo (campos de minas o barreras). En este caso, es posible determinar sus posiciones y posiciones del enemigo, y debido al uso de un cambio significativo en la velocidad y la dirección, las posibilidades de supervivencia del SMRK bajo el bombardeo del enemigo aumentan significativamente. Dichas características técnicas hacen posible desarrollar sistemas de reconocimiento armado que pueden realizar tareas de reconocimiento, vigilancia y detección de blancos, misiones de disparo en presencia de un complejo de armamento y también son capaces de detectar amenazas para su propia defensa (minas, sistemas de armas enemigos, etc.).
Todas estas capacidades de combate deben realizarse en tiempo real para evitar amenazas y neutralizar al enemigo usando sus propias armas. оружиеo canales de comunicación con sistemas de armas remotas. La alta movilidad y la capacidad de localizar y rastrear objetivos y actividades enemigos en condiciones de combate difíciles es extremadamente importante. Para hacer esto, es necesario desarrollar SMRK inteligente capaz de rastrear la actividad del enemigo en tiempo real utilizando algoritmos integrados de reconocimiento de movimiento integrados.
Las características avanzadas, que incluyen sensores, algoritmos para combinar datos, visualización activa y procesamiento de datos, son muy importantes y esto requiere una arquitectura moderna de hardware y software. Cuando se realiza una tarea en SMRK moderno, se utilizan un sistema GPS, una unidad de medición inercial y un sistema de navegación inercial para estimar la ubicación.
Usando los datos de navegación obtenidos a través de estos sistemas, SMRK puede moverse independientemente de acuerdo con los comandos del programa a bordo o el sistema de control remoto. Al mismo tiempo, SMRK es capaz de enviar datos de navegación a una estación de control remoto a intervalos cortos para que el operador sepa su ubicación exacta. SMRK completamente autónomo puede planificar sus acciones, y para esto es absolutamente necesario desarrollar una ruta que elimine las colisiones, al tiempo que minimiza parámetros fundamentales como el tiempo, la energía y la distancia. Se puede usar una computadora de navegación y una computadora con información para crear la ruta óptima y corregirla (los detectores láser y sensores ultrasónicos se pueden usar para detectar obstáculos de manera efectiva).
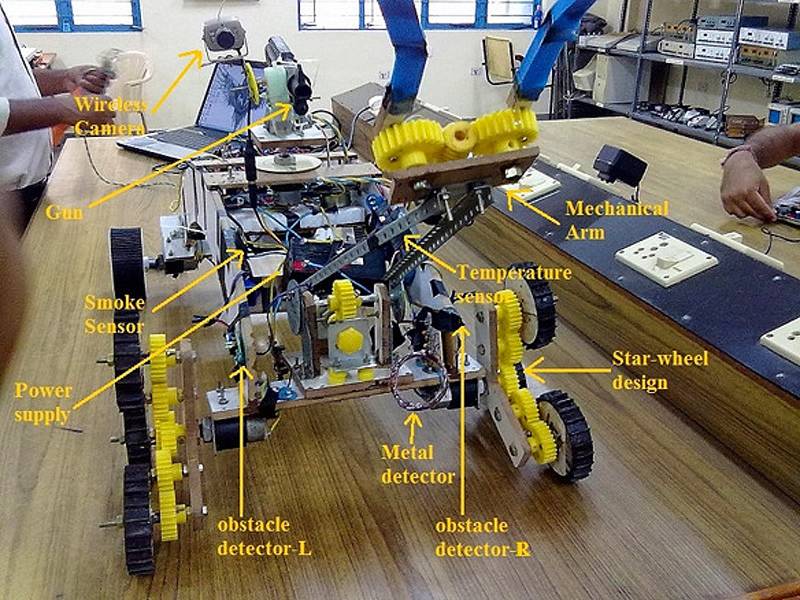
Componentes de un prototipo armado SMRC, desarrollado por estudiantes indios.
Diseño de sistemas de navegación y comunicación.
Otro problema importante en el desarrollo de un SMRK efectivo es el diseño de un sistema de navegación / comunicación. Las cámaras digitales y los sensores se instalan para obtener retroalimentación visual, mientras que los sistemas de infrarrojos se instalan para operar durante la noche; el operador puede ver el video en su computadora y enviar algunos comandos básicos de navegación al SMRC (derecha / izquierda, parada, adelante) para ajustar las señales de navegación.
En el caso de SMRK totalmente autónomo, los sistemas de visualización están integrados con los sistemas de navegación basados en mapas digitales y datos de GPS. Para crear un SMRK completamente autónomo, para funciones básicas como, por ejemplo, la navegación, la integración de sistemas de percepción externos, la planificación de rutas y un canal de comunicación serán necesarios.
Si bien la integración de los sistemas de navegación para SMRK único se encuentra en etapas avanzadas, el desarrollo de algoritmos para planificar el funcionamiento simultáneo de varios SMRC y las tareas conjuntas de SMRC y UAV se encuentra en la etapa inicial, ya que es muy difícil establecer la interacción de comunicación de varios sistemas robóticos a la vez. Los experimentos en curso ayudarán a determinar qué frecuencias y rangos de frecuencia se necesitan y cómo variarán los requisitos para una tarea en particular. Una vez que se determinen estas características, será posible desarrollar funciones avanzadas y software para varias máquinas robóticas.

El helicóptero no tripulado K-MAX transporta el vehículo robótico SMSS (Squad Mission Support System) durante las pruebas de autonomía; el piloto estaba en la cabina del K-MAX, pero no lo controló
Las herramientas de comunicación son muy importantes para el funcionamiento del SMRK, pero las soluciones inalámbricas tienen inconvenientes bastante importantes, ya que la conexión establecida puede perderse debido a la interferencia causada por el terreno, los obstáculos o la actividad del sistema electrónico de supresión del enemigo. Los desarrollos recientes en sistemas de comunicación de máquina a máquina son muy interesantes y, gracias a esta investigación, se pueden crear equipos asequibles y eficientes para la comunicación entre plataformas robóticas. El estándar de comunicación de propósito especial DRSC (comunicación especializada de corto alcance) se aplicará en condiciones reales para la comunicación entre SMRC y entre SMRC y UAV. Actualmente se está prestando mucha atención a garantizar la seguridad de la comunicación en las operaciones centradas en la red y, por lo tanto, los proyectos futuros en el campo de los sistemas habitables y deshabitados deben basarse en soluciones avanzadas que cumplan con los estándares de una interfaz común.
Hoy en día, la mayoría de los requisitos para las tareas a corto plazo con bajo consumo de energía se cumplen, pero existen problemas con las plataformas que realizan tareas a largo plazo con un alto consumo de energía, en particular, la transmisión de video es uno de los problemas más apremiantes.
Combustible
Las opciones de fuente de energía dependen del tipo de sistema: para SMRK pequeño, la fuente de energía puede ser una batería recargable avanzada, pero para SMRC más grande, la energía necesaria puede ser generada por el combustible convencional, que permite realizar un circuito con un motor eléctrico de nueva generación. Los factores más obvios que afectan la fuente de alimentación son las condiciones externas, la masa y las dimensiones de la máquina, así como el tiempo para completar la tarea. En algunos casos, el sistema de suministro de energía debe consistir en un sistema de combustible como fuente principal y una batería recargable (visibilidad reducida). La elección del tipo apropiado de energía depende de todos los factores que influyen en la ejecución de la tarea, y la fuente de energía debe proporcionar la movilidad requerida, el funcionamiento ininterrumpido del sistema de comunicación, el conjunto de sensores y el sistema de armas (si está disponible).
Además, es necesario resolver problemas técnicos asociados con la movilidad en relieves complejos, la percepción de obstáculos y la autocorrección de acciones erróneas. En el marco de proyectos modernos, se han desarrollado nuevas tecnologías robotizadas avanzadas relacionadas con la integración de sensores integrados y el procesamiento de datos, la selección de rutas y la navegación, la detección, la clasificación y la evitación de obstáculos, así como la eliminación de errores asociados con la pérdida de comunicación y la desestabilización de la plataforma. Para la navegación autónoma fuera de la carretera, es necesario que la máquina distinga el terreno, lo que incluye la orografía 3D del terreno (descripción del terreno) y la identificación de obstáculos, como piedras, árboles, cuerpos de agua que no fluyen, etc. Las capacidades generales aumentan constantemente y hoy podemos hablar de un nivel bastante alto de definición de la imagen del terreno, pero solo durante el día y cuando hace buen tiempo, pero las capacidades de las plataformas robóticas en un espacio desconocido y en condiciones climáticas adversas son aún insuficientes. En este sentido, DARPA realiza varios programas experimentales, donde se comprueban las capacidades de las plataformas robóticas en terrenos desconocidos, en cualquier clima, día y noche. El programa DARPA, llamado Investigación aplicada en IA (investigación aplicada en el campo de la inteligencia artificial), realiza investigaciones sobre herramientas inteligentes para la toma de decisiones y otras soluciones tecnológicas avanzadas para sistemas autónomos con vistas a una aplicación específica en sistemas robóticos avanzados, así como algoritmos de aprendizaje autónomo de múltiples robots. realizar tareas conjuntas, lo que permitirá a grupos de robots procesar automáticamente nuevas tareas y redistribuir roles entre ellos.
Como ya se mencionó, las condiciones operativas y el tipo de tarea determinan el diseño del SMRC moderno, que es una plataforma móvil con una fuente de energía, sensores, computadoras y arquitectura de software para la percepción, navegación, comunicación, entrenamiento / adaptación, interacción entre el robot y los seres humanos. En el futuro, serán más multilaterales, tendrán un mayor nivel de unificación e interacción y también serán más efectivos desde el punto de vista económico. De particular interés son los sistemas con una carga útil modular, que le permite adaptar máquinas para diferentes tareas. En la próxima década, los vehículos robóticos estarán disponibles para realizar operaciones tácticas y proteger bases y otras infraestructuras basadas en una arquitectura abierta. Se caracterizarán por un importante nivel de uniformidad y autonomía, alta movilidad y sistemas a bordo modulares.
La tecnología SMRC para uso militar se está desarrollando rápidamente, lo que permitirá a muchas fuerzas armadas remover soldados de tareas peligrosas, incluida la detección y destrucción de IED, reconocimiento, protección de sus fuerzas, desminado y mucho más. Por ejemplo, el concepto de brigada de los grupos de combate del ejército estadounidense gracias al modelado avanzado por computadora, el entrenamiento de combate y la experiencia de operaciones de combate reales demostró que los vehículos robóticos aumentaron la capacidad de supervivencia de los vehículos terrestres con tripulaciones y contribuyeron a un aumento significativo en la efectividad del combate. El desarrollo de tecnologías prometedoras, como movilidad, autonomía, armado, interfaces hombre-máquina, inteligencia artificial para sistemas robóticos, integración con otros SMRK y sistemas habitables, permitirá aumentar las capacidades de los sistemas de tierra deshabitados y su nivel de autonomía.


Plataforma compleja robótica de choque ruso - M desarrollada por NITI Progress
Materiales utilizados:
www.defense-update.com
www.qinetiq.com
www.milrem.ee
www.darpa.mil
www.airforce.com
www.niti-progress.ru
www.wikipedia.org
en.wikipedia.org
información