Aviones de reconocimiento no tripulados Lockheed D-21B (EE. UU.)
El 30 de julio de 1966, otro vuelo de prueba del prometedor vehículo de reconocimiento no tripulado Lockheed D-21A terminó en un accidente. Cuando se separó del avión de transporte M-21, el dispositivo golpeó su quilla. El equipo dañado comenzó a desmoronarse literalmente en pedazos, pero la tripulación logró expulsar. El piloto escapó con éxito, pero el operador zumbido dañó el traje de gran altitud, por lo que se ahogó. Se suspendieron las pruebas del complejo como parte del avión M-21 y el aparato D-21A. Sin embargo, el prometedor proyecto no se detuvo. Pronto, Lockheed creó una nueva versión del vehículo aéreo no tripulado de reconocimiento llamado D-21B.
Después de la muerte del operador de pruebas Ray Torik, el diseñador jefe del proyecto D-21A y el jefe del departamento de Skunk Works, Kelly Johnson, ordenaron que se detuvieran todos los vuelos. La idea de un complejo basado en el principio de "madre e hija" fracasó y llevó a la tragedia. Sin embargo, el avión de reconocimiento no tripulado supersónico a gran altura todavía era de interés para el cliente potencial, por lo que se tomó una decisión fundamental para continuar el trabajo, pero ya con la actualización de las características principales del proyecto. Se planificó aumentar la seguridad de los pilotos durante el proyecto con la designación D-21B.

UAV D-21B en el carro. Foto de la fuerza aérea de los Estados Unidos
Las pruebas de D-21A llevaron a la identificación de una serie de fallas de diseño que aún debían abordarse. Al mismo tiempo, en el nivel del concepto y la arquitectura general, este proyecto fue reconocido como adecuado para un mayor desarrollo. Como parte de la modernización planificada, fue posible abandonar el drone existente, haciendo pequeñas modificaciones en su diseño. Al mismo tiempo, fue necesario reconsiderar radicalmente las vistas en el portaaviones, lo que es necesario para la aceleración inicial y la elevación del vehículo a la altura de trabajo.
El uso de un agente de inteligencia modificado A-12 como portador no se justifica. Se decidió utilizar un avión diferente, a saber, el bombardero B-52H. Sin embargo, esta máquina difería de la velocidad de vuelo subsónica y no podía acelerar independientemente el UAV a las velocidades de operación de su motor. En este caso, sin embargo, el bombardero de largo alcance podría transportar más de un vehículo de reconocimiento. Para resolver el problema con los datos de vuelo de la aerolínea, se decidió desarrollar un acelerador adicional cuya tarea sería llevar el D-21B a la altura requerida y acelerar a la velocidad deseada. La capacidad de carga del bombardero portador permitió levantar tanto el dron como el aparato con un acelerador en el aire.
Como resultado, la aparición del complejo de reconocimiento se determinó de la siguiente manera. El transportista era un bombardero en serie, la última revisión necesaria. Se propuso colgar el aparato D-21B equipado con un acelerador de refuerzo. Se planeó despegar del campo de aviación por las fuerzas de un bombardero, al cual uno o dos vehículos fueron suspendidos. Después de subir a cierta altura y alcanzar un rumbo predeterminado, el avión tuvo que bajar su carga útil. Luego se encendió el acelerador, lo que llevó al dispositivo al modo de funcionamiento. Después de eso, D-21B podría enviarse a su objetivo y realizar un reconocimiento. La última etapa del vuelo de reconocimiento en el nuevo proyecto no cambió: después de la fotografía, tuvo que ir al área especificada y reiniciar el compartimiento de hardware, después de lo cual las unidades restantes se autodestruyeron. El contenedor con el equipo se propuso capturar en el aire con la ayuda del avión Lockheed JC-130B Cat's-Whiskers con equipo especial. También fue posible levantar el contenedor embarcado a bordo de un barco especial.
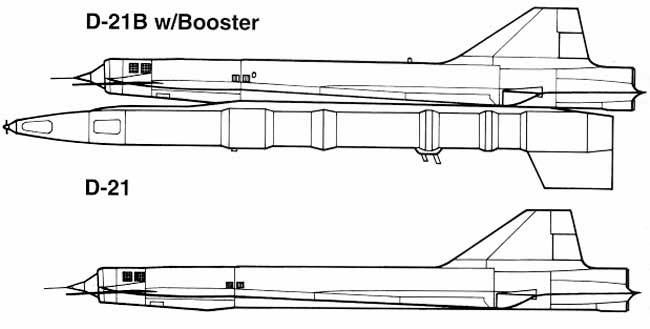
Esquema del aparato. Desde arriba D-21B con el acelerador, desde abajo, sin él. Figura Testpilot.ru
La arquitectura propuesta del complejo D-21B permitió prescindir de alteraciones serias del vehículo no tripulado existente. Las características principales de su diseño siguieron siendo las mismas, sin embargo, se requirieron algunos cambios para varias unidades requeridas para la instalación del acelerador y la suspensión para un nuevo transportista. El resto del D-21B no difirió de la base D-21A.
El dron con equipo de reconocimiento tenía un fuselaje cilíndrico con una entrada de aire frontal, equipado con un cuerpo central cónico. El extremo de la cola del fuselaje tenía una carcasa para la boquilla del motor principal. Un ala triangular con flujo ojival desarrollado acoplado al fuselaje. Había una quilla trapezoidal relativamente grande. Para controlar el vuelo, se propuso utilizar elevones, bajo los cuales se daba todo el borde trasero del ala, y el timón en la quilla. La longitud del dispositivo fue 13,1 m, envergadura - 5,8 m, altura - 2,2 m. Peso de despegue (excluyendo el acelerador) - 5 t.
Los principales elementos estructurales del aparato D-21B fueron hechos de titanio. Sólo se propuso que las partes individuales estuvieran hechas de acero o plástico. En la parte delantera del fuselaje, justo detrás de la entrada de aire, se colocó un compartimento para acomodar el equipo. Debido al alto costo y la complejidad de la producción, se decidió hacer el equipo a bordo reutilizable. El equipo de control, el sistema de navegación inercial y las cámaras se colocaron en un contenedor separado, equipado con los medios para mantener el clima deseado. Después del final del vuelo, el UAV tuvo que dejar caer todo el contenedor. Velocidad de descenso permitida proporcionada por el paracaídas disponible.
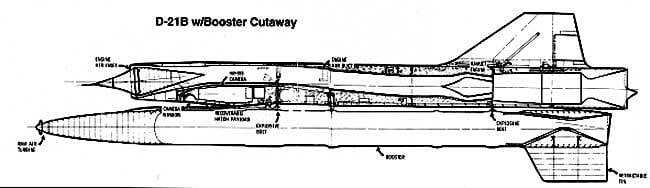
El trazado del drone. Figura Testpilot.ru
El compartimiento de la cola del aparato se destinó a la colocación de un ramet Marquardt XRJ-MA20S-4 680 kgf. Este motor fue un desarrollo adicional del producto creado anteriormente para el misil antiaéreo Boeing CIM-10 Bomarc. Durante la revisión, el motor recibió algunos sistemas nuevos, gracias a los cuales la duración de la operación continua se llevó a una hora y media, lo cual fue suficiente para resolver las tareas.
El sistema de combustible fue preservado, basado en las ideas incorporadas en los proyectos de aviones de reconocimiento supersónico. El combustible almacenado en los tanques internos se bombeó a través de los intercambiadores de calor colocados debajo de la carcasa del aparato y se enfrió. Esto hizo posible reducir las cargas térmicas en la estructura a valores aceptables.
D-21B podría alcanzar velocidades de hasta M = 3,5. El práctico techo alcanzó 29 km. La reserva de combustible debería haber sido suficiente para un vuelo a una distancia de al menos 5000 km. Durante los vuelos de prueba, fue posible lograr un aumento significativo en el rango debido al uso de las condiciones de operación del motor más eficientes y al uso de un acelerador de arranque.
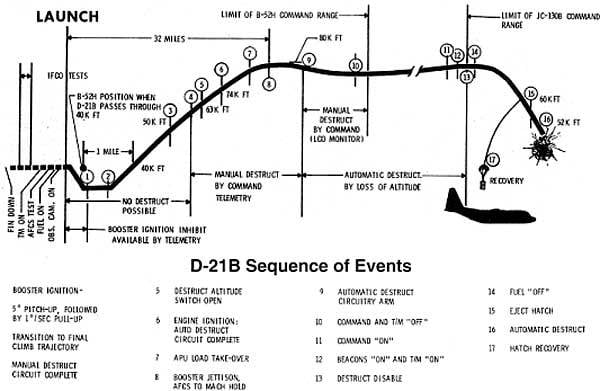
El nuevo proyecto de perfil de vuelo propuesto. Figura Testpilot.ru
Los accesorios para conectar con el acelerador aparecieron en la superficie inferior del avión no tripulado actualizado. Para la aceleración inicial, se propuso utilizar un dispositivo adicional equipado con un motor de cohete propulsor líquido (según otros datos, propelente sólido). El booster tenía un cuerpo cilíndrico con una cabeza cónica. En la superficie lateral del casco había varias protuberancias y salientes necesarios para la instalación de este o aquel equipo, así como para la conexión con el aparato de reconocimiento. Una pequeña cresta-quilla trapezoidal estaba ubicada debajo de la parte de la cola del casco. El acelerador tenía una longitud de 13,5 m y pesaba sobre 6 t.
En la nariz del acelerador se ubicó el compartimiento del instrumento con un conjunto de equipos para arrancar el motor principal del UAV. Inmediatamente en el morro se colocó el impulsor, bajo la presión del aire que impulsa el generador y las bombas del sistema hidráulico. Se propuso utilizar energía eléctrica y presión en los sistemas para lanzar los dispositivos principales del aparato D-21B antes de su salida al vuelo independiente.
Después de desacoplarse del transportista, el paquete en forma de un avión no tripulado y un acelerador tuvo que planificar durante unos segundos y alejarse de la aeronave. Después de eso, se inició el acelerador, que, durante el funcionamiento del 90, aceleró el dispositivo a una velocidad de M = 3 y lo elevó a una altura de aproximadamente 22 km. Allí, se descargó el acelerador gastado, después de lo cual se suponía que el D-21B debía comenzar una misión independiente hacia el objetivo.

Máquina experimentada bajo el ala del portaaviones. Foto de la fuerza aérea de los Estados Unidos
A mediados de diciembre, 1966, la fuerza aérea, que seguía siendo el cliente para el desarrollo del proyecto, fue entregada a Lockheed, el bombardero B-52H (número de serie 60-0036), que pronto sería el portador de un avión de reconocimiento no tripulado. Pronto, el segundo avión con el número 60-0032 fue enviado a la planta en Pamdale. En las alas de la aeronave, entre el fuselaje y los pares centrales de motores, se instalaron dos torres de tracción con cierres para el transporte del complejo de reconocimiento. Los medios de montaje aseguran mantener el dron detrás de las cerraduras en la parte superior del fuselaje. El acelerador, a su vez, estaba colgado de la parte inferior del dispositivo.
28 de septiembre 1967, uno de los bombarderos convertidos despegó del campo de aviación y se dirigió al punto de lanzamiento D-21B. Sin embargo, el primer vuelo del dispositivo actualizado en ese día no tuvo lugar. En el camino hacia el punto de descarga, los montajes de pilones se rompieron, debido a lo cual el aparato experimental No. XXUMX se rompió y se estrelló. K. Johnson notó que este incidente había confundido al equipo del departamento de Skunk Works.
En noviembre, 6, el avión de transporte pudo entregar el prototipo del modelo 507 al punto de partida y restablecerlo allí. Además, todos los sistemas funcionaron normalmente, de modo que el prototipo del oficial de inteligencia pudo volar 250 km. 2 Diciembre del mismo año, artículo # 509 estableció un tipo de récord, volando 2650 km. Los siguientes dos lanzamientos, realizados en enero 19 y abril 10 en 68, terminaron con el vuelo de vehículos a una distancia de no más de 520 km.

Modificado B-52H con dos aviones de reconocimiento no tripulados debajo del ala. Foto Airwar.ru
Según algunos informes, pronto se decidió iniciar inspecciones a gran escala con la imitación del trabajo de inteligencia real. Se suponía que el dispositivo debía tomar fotografías de un área específica y luego soltar el contenedor con el equipo y la película. Durante el verano de 1968, se realizaron tres vuelos de prueba. En el primero de ellos, el prototipo No. 513 voló 5300 km, tomó las fotos necesarias y dejó caer el contenedor, que pronto fue recogido. Desde diciembre 1968 hasta julio 1969, Skunk Works y organizaciones relacionadas realizaron cuatro pruebas más. Durante estos vuelos, el alcance máximo alcanzó 5470 km. Los sistemas de "captura" del contenedor contenedor en el aire se han mostrado desde el lado bueno.
Las capacidades de los bombarderos B-52H hicieron posible el transporte simultáneo de hasta dos aviones de reconocimiento no tripulados. Durante los lanzamientos de prueba, los operadores efectivamente salieron al aire repetidamente con dos D-21B, pero cada vez solo se lanzó uno de ellos. El segundo, a su vez, sirvió como un suplente en caso de cualquier problema. Sin embargo, hasta donde se sabe, tal reemplazo nunca ha sido necesario.
De acuerdo con los resultados de la prueba, se encontró que el complejo de reconocimiento en forma de un bombardero convertido, un dron D-21B y un acelerador son adecuados para la operación real. La Fuerza Aérea de los Estados Unidos decidió comenzar a operar nueva tecnología para llevar a cabo la inteligencia estratégica. Por la caída de 1969, el complejo fue preparado para su uso en condiciones reales. El programa de aplicación de los oficiales de inteligencia más nuevos se llamó Senior Bowl. Se suponía que los transportistas despegaran de las bases aéreas de Beale (California) y Andersen (Guam).

El dispositivo en vuelo - el acelerador funciona. Foto de la fuerza aérea de los Estados Unidos
El primer vuelo de reconocimiento a gran escala del D-21B tuvo lugar el 9 de noviembre del año 1969. El propósito de la inteligencia No. XXUMX era el sitio de prueba nuclear chino Lobnor ubicado en la parte occidental del país. Separado del transportista, el dron se dirigió al área objetivo y, al parecer, tomó las fotografías necesarias. Sin embargo, después de eso, hubo una cierta falla en los sistemas de guía, debido a los cuales no se dio la vuelta y no regresó hacia el océano, donde lo esperaban aviones y embarcaciones con equipo para atrapar el contenedor de hardware. Los expertos estadounidenses no esperaron el regreso del aparato de inteligencia, por lo que fue declarado perdido.
Más tarde se supo que el D-21B continuó volando y permaneció en el aire hasta la producción de combustible, y luego planificó hasta el suelo. Pronto fue encontrado por la contrainteligencia soviética. Por coincidencia, el avión no tripulado cayó a unos cientos de kilómetros del sitio de prueba de Baikonur. Tal descubrimiento interesó a los especialistas soviéticos que iniciaron su estudio. Se cree que algunas ideas y soluciones, basadas en la tecnología estadounidense, se usaron más tarde en la creación de aviones soviéticos de propósito similar.
De acuerdo con los resultados del primer lanzamiento de "combate", se decidió realizar pruebas adicionales. 20 de febrero El número de serie de 1970 521, que sufrió algunas mejoras, voló con éxito alrededor de 5400 km, tomó una foto de un objetivo condicional y dejó caer el contenedor en un área determinada donde fue capturado por los pilotos de aviones JC-130B. De acuerdo con los resultados de estas pruebas, se decidió continuar con la operación militar de los equipos, que, sin embargo, deberían actualizarse con la última versión del proyecto.
16 Diciembre del mismo año, el segundo lanzamiento tuvo lugar como parte de la Operación Senior Bowl. El número de dispositivo XXUMX enviado para disparar objetos secretos chinos. Habiendo volado alrededor de 523 km, el dispositivo dejó caer el contenedor y se autodestruyó. Después de volcar, el contenedor no pudo abrir el paracaídas, debido a lo cual los pilotos de los aviones especialmente equipados no lo atraparon. Pronto, el contenedor cayó al Océano Pacífico y se ahogó, llevando consigo toda la información de inteligencia recopilada.
4 de marzo 1971, el tercer vuelo de scout del D-21B obtuvo un éxito. Tras superar una ruta más larga que 5430 km, el aparato No.526 dejó caer el contenedor con el equipo y las imágenes del polígono de Lobnor en una región determinada del Océano Pacífico. El avión en servicio allí de nuevo no pudo atrapar el contenedor, dejándolo caer al agua. La tripulación se acercó a la nave no se hizo cargo de la "captura" en el primer intento. Al realizar una maniobra para un nuevo acercamiento, la nave dañó el contenedor, por lo que se fue al fondo.
El último vuelo del D-21B tuvo lugar en 20 en marzo del mismo año. El dispositivo número XXUMX no regresó del vuelo, y su destino permaneció en secreto durante mucho tiempo. Los militares y los diseñadores consideraron que el equipo de reconocimiento estaba funcionando mal o fue golpeado por unidades de defensa aérea chinas. Unas décadas más tarde, se supo que el dron sin la "ayuda" de otra persona cayó en la provincia de Yunnan, donde se encontró más tarde. Durante algún tiempo, los restos de una tecnología única permanecieron inactivos en uno de los sitios del Museo de Aviación de China (Beijing), desde donde se transfirieron a la exposición en 527. Ahora se muestra una gran sección del fuselaje y el ala de la quilla. Por razones obvias, esta exhibición no es el mejor estado.

El drone superviviente en la exposición del museo Blackbird Park. Foto de Wikimedia Commons
En los años 1969-71, la Fuerza Aérea de los EE. UU. Realizó cuatro lanzamientos de drones de reconocimiento D-21B. Ninguno de ellos terminó tomando fotos. En dos casos, los dispositivos por una razón u otra no regresaron de la tarea, y en los otros dos hubo serios problemas con la devolución del contenedor. Al mismo tiempo, el equipo era bastante caro. Según los informes, la construcción y el uso de una sola unidad cuestan alrededor de 5,5 millones de dólares en precios de 1970 del año (un poco menos de 35 millones según los estándares modernos). Resultados similares obligaron a dudar de la conveniencia de una mayor operación del equipo. Después de algunas disputas y discusiones, se tomó una decisión final, que puso fin a historias proyecto interesante
23 de julio 1971, el programa D-21B se cerró oficialmente debido a la falta de resultados reales y la presencia de muchos problemas sin solución. Además, en este momento, los Estados Unidos habían creado una agrupación bastante grande de satélites de inteligencia, que diferían de la operación más eficiente del avión no tripulado. Los equipos de nuevos tipos construidos y transferidos al cliente fueron dados de baja. Los bombarderos fueron convertidos al proyecto original y devueltos a las unidades apropiadas.
Dentro de los proyectos D-21A y D-21B, Lockheed construyó prototipos 38. El producto 21 se utilizó en pruebas y durante el servicio militar. Los drones 17 restantes estaban sin trabajo. Primero, fueron enviados para su almacenamiento en la base Norton (piezas de California), desde donde luego fueron transportados al "vertedero" de la base Davis-Monten (piezas de Arizona). Las áreas de almacenamiento para equipos de aeronaves fuera de servicio no están protegidas de miradas indiscretas, debido a lo cual los entusiastas de la aviación pronto notaron "nuevos artículos". Después de esto, el desarrollo más interesante del departamento de Skunk Works se hizo ampliamente conocido.

La cola de la muestra del museo. Foto de Wikimedia Commons
Curiosamente, en algunos materiales, a partir de los años setenta, los drones de reconocimiento se designan como GTD-21B. Por alguna razón, se han agregado letras al nombre original del vehículo, lo que significa "entrenamiento en tierra", "entrenamiento en tierra". Probablemente, de esta manera, la fuerza aérea trató de ocultar el verdadero propósito de los vehículos fuera de servicio. Sin embargo, una mayor divulgación de la información y la aparición de información nueva y más completa hicieron innecesario dicho enmascaramiento.
Más tarde, los drones, que ya no eran necesarios, se distribuyeron entre los museos de aviación de los Estados Unidos. Actualmente, la exposición de varios museos tiene aproximadamente una docena de muestras de este tipo. Ocho vehículos, presentados en museos, pertenecen a la modificación con la letra “B”. En cuanto a la primera modificación de la tecnología, la muestra ubicada en Seattle se monta en el único avión de transporte restante, M-21.
Inicialmente, el objetivo de los diseñadores del departamento de Skunk Works, dirigido por Kelly Johnson, era crear un prometedor vehículo de reconocimiento no tripulado capaz de reemplazar aviones tripulados y reducir los riesgos para el personal. Mediante el uso de ciertos materiales y algunas ideas audaces, los ingenieros lograron crear la técnica requerida. Sin embargo, la falta de ciertas tecnologías y la dificultad de encontrar un reemplazo para ellas no dieron el mejor resultado. Hasta el final de las pruebas y el funcionamiento de la familia D-21, el problema se debía a la dificultad de devolver el contenedor con el equipo y los resultados de la fotografía. No fue posible resolver este problema. Tales problemas en combinación con la complejidad y el alto costo de la tecnología llevaron al abandono de un desarrollo interesante e inusual.
Residencia en:
http://testpilot.ru/
http://airwar.ru/
http://globalsecurity.org/
http://designation-systems.net/
http://airforceworld.com/
http://wvi.com/
Nikolsky M.V. Rayo Negro SR-71. - M .: "Astrel Publishing House", "AST Publishing House", 2001. - (aviones famosos).
Después de la muerte del operador de pruebas Ray Torik, el diseñador jefe del proyecto D-21A y el jefe del departamento de Skunk Works, Kelly Johnson, ordenaron que se detuvieran todos los vuelos. La idea de un complejo basado en el principio de "madre e hija" fracasó y llevó a la tragedia. Sin embargo, el avión de reconocimiento no tripulado supersónico a gran altura todavía era de interés para el cliente potencial, por lo que se tomó una decisión fundamental para continuar el trabajo, pero ya con la actualización de las características principales del proyecto. Se planificó aumentar la seguridad de los pilotos durante el proyecto con la designación D-21B.

UAV D-21B en el carro. Foto de la fuerza aérea de los Estados Unidos
Las pruebas de D-21A llevaron a la identificación de una serie de fallas de diseño que aún debían abordarse. Al mismo tiempo, en el nivel del concepto y la arquitectura general, este proyecto fue reconocido como adecuado para un mayor desarrollo. Como parte de la modernización planificada, fue posible abandonar el drone existente, haciendo pequeñas modificaciones en su diseño. Al mismo tiempo, fue necesario reconsiderar radicalmente las vistas en el portaaviones, lo que es necesario para la aceleración inicial y la elevación del vehículo a la altura de trabajo.
El uso de un agente de inteligencia modificado A-12 como portador no se justifica. Se decidió utilizar un avión diferente, a saber, el bombardero B-52H. Sin embargo, esta máquina difería de la velocidad de vuelo subsónica y no podía acelerar independientemente el UAV a las velocidades de operación de su motor. En este caso, sin embargo, el bombardero de largo alcance podría transportar más de un vehículo de reconocimiento. Para resolver el problema con los datos de vuelo de la aerolínea, se decidió desarrollar un acelerador adicional cuya tarea sería llevar el D-21B a la altura requerida y acelerar a la velocidad deseada. La capacidad de carga del bombardero portador permitió levantar tanto el dron como el aparato con un acelerador en el aire.
Como resultado, la aparición del complejo de reconocimiento se determinó de la siguiente manera. El transportista era un bombardero en serie, la última revisión necesaria. Se propuso colgar el aparato D-21B equipado con un acelerador de refuerzo. Se planeó despegar del campo de aviación por las fuerzas de un bombardero, al cual uno o dos vehículos fueron suspendidos. Después de subir a cierta altura y alcanzar un rumbo predeterminado, el avión tuvo que bajar su carga útil. Luego se encendió el acelerador, lo que llevó al dispositivo al modo de funcionamiento. Después de eso, D-21B podría enviarse a su objetivo y realizar un reconocimiento. La última etapa del vuelo de reconocimiento en el nuevo proyecto no cambió: después de la fotografía, tuvo que ir al área especificada y reiniciar el compartimiento de hardware, después de lo cual las unidades restantes se autodestruyeron. El contenedor con el equipo se propuso capturar en el aire con la ayuda del avión Lockheed JC-130B Cat's-Whiskers con equipo especial. También fue posible levantar el contenedor embarcado a bordo de un barco especial.
Esquema del aparato. Desde arriba D-21B con el acelerador, desde abajo, sin él. Figura Testpilot.ru
La arquitectura propuesta del complejo D-21B permitió prescindir de alteraciones serias del vehículo no tripulado existente. Las características principales de su diseño siguieron siendo las mismas, sin embargo, se requirieron algunos cambios para varias unidades requeridas para la instalación del acelerador y la suspensión para un nuevo transportista. El resto del D-21B no difirió de la base D-21A.
El dron con equipo de reconocimiento tenía un fuselaje cilíndrico con una entrada de aire frontal, equipado con un cuerpo central cónico. El extremo de la cola del fuselaje tenía una carcasa para la boquilla del motor principal. Un ala triangular con flujo ojival desarrollado acoplado al fuselaje. Había una quilla trapezoidal relativamente grande. Para controlar el vuelo, se propuso utilizar elevones, bajo los cuales se daba todo el borde trasero del ala, y el timón en la quilla. La longitud del dispositivo fue 13,1 m, envergadura - 5,8 m, altura - 2,2 m. Peso de despegue (excluyendo el acelerador) - 5 t.
Los principales elementos estructurales del aparato D-21B fueron hechos de titanio. Sólo se propuso que las partes individuales estuvieran hechas de acero o plástico. En la parte delantera del fuselaje, justo detrás de la entrada de aire, se colocó un compartimento para acomodar el equipo. Debido al alto costo y la complejidad de la producción, se decidió hacer el equipo a bordo reutilizable. El equipo de control, el sistema de navegación inercial y las cámaras se colocaron en un contenedor separado, equipado con los medios para mantener el clima deseado. Después del final del vuelo, el UAV tuvo que dejar caer todo el contenedor. Velocidad de descenso permitida proporcionada por el paracaídas disponible.
El trazado del drone. Figura Testpilot.ru
El compartimiento de la cola del aparato se destinó a la colocación de un ramet Marquardt XRJ-MA20S-4 680 kgf. Este motor fue un desarrollo adicional del producto creado anteriormente para el misil antiaéreo Boeing CIM-10 Bomarc. Durante la revisión, el motor recibió algunos sistemas nuevos, gracias a los cuales la duración de la operación continua se llevó a una hora y media, lo cual fue suficiente para resolver las tareas.
El sistema de combustible fue preservado, basado en las ideas incorporadas en los proyectos de aviones de reconocimiento supersónico. El combustible almacenado en los tanques internos se bombeó a través de los intercambiadores de calor colocados debajo de la carcasa del aparato y se enfrió. Esto hizo posible reducir las cargas térmicas en la estructura a valores aceptables.
D-21B podría alcanzar velocidades de hasta M = 3,5. El práctico techo alcanzó 29 km. La reserva de combustible debería haber sido suficiente para un vuelo a una distancia de al menos 5000 km. Durante los vuelos de prueba, fue posible lograr un aumento significativo en el rango debido al uso de las condiciones de operación del motor más eficientes y al uso de un acelerador de arranque.
El nuevo proyecto de perfil de vuelo propuesto. Figura Testpilot.ru
Los accesorios para conectar con el acelerador aparecieron en la superficie inferior del avión no tripulado actualizado. Para la aceleración inicial, se propuso utilizar un dispositivo adicional equipado con un motor de cohete propulsor líquido (según otros datos, propelente sólido). El booster tenía un cuerpo cilíndrico con una cabeza cónica. En la superficie lateral del casco había varias protuberancias y salientes necesarios para la instalación de este o aquel equipo, así como para la conexión con el aparato de reconocimiento. Una pequeña cresta-quilla trapezoidal estaba ubicada debajo de la parte de la cola del casco. El acelerador tenía una longitud de 13,5 m y pesaba sobre 6 t.
En la nariz del acelerador se ubicó el compartimiento del instrumento con un conjunto de equipos para arrancar el motor principal del UAV. Inmediatamente en el morro se colocó el impulsor, bajo la presión del aire que impulsa el generador y las bombas del sistema hidráulico. Se propuso utilizar energía eléctrica y presión en los sistemas para lanzar los dispositivos principales del aparato D-21B antes de su salida al vuelo independiente.
Después de desacoplarse del transportista, el paquete en forma de un avión no tripulado y un acelerador tuvo que planificar durante unos segundos y alejarse de la aeronave. Después de eso, se inició el acelerador, que, durante el funcionamiento del 90, aceleró el dispositivo a una velocidad de M = 3 y lo elevó a una altura de aproximadamente 22 km. Allí, se descargó el acelerador gastado, después de lo cual se suponía que el D-21B debía comenzar una misión independiente hacia el objetivo.

Máquina experimentada bajo el ala del portaaviones. Foto de la fuerza aérea de los Estados Unidos
A mediados de diciembre, 1966, la fuerza aérea, que seguía siendo el cliente para el desarrollo del proyecto, fue entregada a Lockheed, el bombardero B-52H (número de serie 60-0036), que pronto sería el portador de un avión de reconocimiento no tripulado. Pronto, el segundo avión con el número 60-0032 fue enviado a la planta en Pamdale. En las alas de la aeronave, entre el fuselaje y los pares centrales de motores, se instalaron dos torres de tracción con cierres para el transporte del complejo de reconocimiento. Los medios de montaje aseguran mantener el dron detrás de las cerraduras en la parte superior del fuselaje. El acelerador, a su vez, estaba colgado de la parte inferior del dispositivo.
28 de septiembre 1967, uno de los bombarderos convertidos despegó del campo de aviación y se dirigió al punto de lanzamiento D-21B. Sin embargo, el primer vuelo del dispositivo actualizado en ese día no tuvo lugar. En el camino hacia el punto de descarga, los montajes de pilones se rompieron, debido a lo cual el aparato experimental No. XXUMX se rompió y se estrelló. K. Johnson notó que este incidente había confundido al equipo del departamento de Skunk Works.
En noviembre, 6, el avión de transporte pudo entregar el prototipo del modelo 507 al punto de partida y restablecerlo allí. Además, todos los sistemas funcionaron normalmente, de modo que el prototipo del oficial de inteligencia pudo volar 250 km. 2 Diciembre del mismo año, artículo # 509 estableció un tipo de récord, volando 2650 km. Los siguientes dos lanzamientos, realizados en enero 19 y abril 10 en 68, terminaron con el vuelo de vehículos a una distancia de no más de 520 km.
Modificado B-52H con dos aviones de reconocimiento no tripulados debajo del ala. Foto Airwar.ru
Según algunos informes, pronto se decidió iniciar inspecciones a gran escala con la imitación del trabajo de inteligencia real. Se suponía que el dispositivo debía tomar fotografías de un área específica y luego soltar el contenedor con el equipo y la película. Durante el verano de 1968, se realizaron tres vuelos de prueba. En el primero de ellos, el prototipo No. 513 voló 5300 km, tomó las fotos necesarias y dejó caer el contenedor, que pronto fue recogido. Desde diciembre 1968 hasta julio 1969, Skunk Works y organizaciones relacionadas realizaron cuatro pruebas más. Durante estos vuelos, el alcance máximo alcanzó 5470 km. Los sistemas de "captura" del contenedor contenedor en el aire se han mostrado desde el lado bueno.
Las capacidades de los bombarderos B-52H hicieron posible el transporte simultáneo de hasta dos aviones de reconocimiento no tripulados. Durante los lanzamientos de prueba, los operadores efectivamente salieron al aire repetidamente con dos D-21B, pero cada vez solo se lanzó uno de ellos. El segundo, a su vez, sirvió como un suplente en caso de cualquier problema. Sin embargo, hasta donde se sabe, tal reemplazo nunca ha sido necesario.
De acuerdo con los resultados de la prueba, se encontró que el complejo de reconocimiento en forma de un bombardero convertido, un dron D-21B y un acelerador son adecuados para la operación real. La Fuerza Aérea de los Estados Unidos decidió comenzar a operar nueva tecnología para llevar a cabo la inteligencia estratégica. Por la caída de 1969, el complejo fue preparado para su uso en condiciones reales. El programa de aplicación de los oficiales de inteligencia más nuevos se llamó Senior Bowl. Se suponía que los transportistas despegaran de las bases aéreas de Beale (California) y Andersen (Guam).

El dispositivo en vuelo - el acelerador funciona. Foto de la fuerza aérea de los Estados Unidos
El primer vuelo de reconocimiento a gran escala del D-21B tuvo lugar el 9 de noviembre del año 1969. El propósito de la inteligencia No. XXUMX era el sitio de prueba nuclear chino Lobnor ubicado en la parte occidental del país. Separado del transportista, el dron se dirigió al área objetivo y, al parecer, tomó las fotografías necesarias. Sin embargo, después de eso, hubo una cierta falla en los sistemas de guía, debido a los cuales no se dio la vuelta y no regresó hacia el océano, donde lo esperaban aviones y embarcaciones con equipo para atrapar el contenedor de hardware. Los expertos estadounidenses no esperaron el regreso del aparato de inteligencia, por lo que fue declarado perdido.
Más tarde se supo que el D-21B continuó volando y permaneció en el aire hasta la producción de combustible, y luego planificó hasta el suelo. Pronto fue encontrado por la contrainteligencia soviética. Por coincidencia, el avión no tripulado cayó a unos cientos de kilómetros del sitio de prueba de Baikonur. Tal descubrimiento interesó a los especialistas soviéticos que iniciaron su estudio. Se cree que algunas ideas y soluciones, basadas en la tecnología estadounidense, se usaron más tarde en la creación de aviones soviéticos de propósito similar.
De acuerdo con los resultados del primer lanzamiento de "combate", se decidió realizar pruebas adicionales. 20 de febrero El número de serie de 1970 521, que sufrió algunas mejoras, voló con éxito alrededor de 5400 km, tomó una foto de un objetivo condicional y dejó caer el contenedor en un área determinada donde fue capturado por los pilotos de aviones JC-130B. De acuerdo con los resultados de estas pruebas, se decidió continuar con la operación militar de los equipos, que, sin embargo, deberían actualizarse con la última versión del proyecto.

16 Diciembre del mismo año, el segundo lanzamiento tuvo lugar como parte de la Operación Senior Bowl. El número de dispositivo XXUMX enviado para disparar objetos secretos chinos. Habiendo volado alrededor de 523 km, el dispositivo dejó caer el contenedor y se autodestruyó. Después de volcar, el contenedor no pudo abrir el paracaídas, debido a lo cual los pilotos de los aviones especialmente equipados no lo atraparon. Pronto, el contenedor cayó al Océano Pacífico y se ahogó, llevando consigo toda la información de inteligencia recopilada.
4 de marzo 1971, el tercer vuelo de scout del D-21B obtuvo un éxito. Tras superar una ruta más larga que 5430 km, el aparato No.526 dejó caer el contenedor con el equipo y las imágenes del polígono de Lobnor en una región determinada del Océano Pacífico. El avión en servicio allí de nuevo no pudo atrapar el contenedor, dejándolo caer al agua. La tripulación se acercó a la nave no se hizo cargo de la "captura" en el primer intento. Al realizar una maniobra para un nuevo acercamiento, la nave dañó el contenedor, por lo que se fue al fondo.
El último vuelo del D-21B tuvo lugar en 20 en marzo del mismo año. El dispositivo número XXUMX no regresó del vuelo, y su destino permaneció en secreto durante mucho tiempo. Los militares y los diseñadores consideraron que el equipo de reconocimiento estaba funcionando mal o fue golpeado por unidades de defensa aérea chinas. Unas décadas más tarde, se supo que el dron sin la "ayuda" de otra persona cayó en la provincia de Yunnan, donde se encontró más tarde. Durante algún tiempo, los restos de una tecnología única permanecieron inactivos en uno de los sitios del Museo de Aviación de China (Beijing), desde donde se transfirieron a la exposición en 527. Ahora se muestra una gran sección del fuselaje y el ala de la quilla. Por razones obvias, esta exhibición no es el mejor estado.

El drone superviviente en la exposición del museo Blackbird Park. Foto de Wikimedia Commons
En los años 1969-71, la Fuerza Aérea de los EE. UU. Realizó cuatro lanzamientos de drones de reconocimiento D-21B. Ninguno de ellos terminó tomando fotos. En dos casos, los dispositivos por una razón u otra no regresaron de la tarea, y en los otros dos hubo serios problemas con la devolución del contenedor. Al mismo tiempo, el equipo era bastante caro. Según los informes, la construcción y el uso de una sola unidad cuestan alrededor de 5,5 millones de dólares en precios de 1970 del año (un poco menos de 35 millones según los estándares modernos). Resultados similares obligaron a dudar de la conveniencia de una mayor operación del equipo. Después de algunas disputas y discusiones, se tomó una decisión final, que puso fin a historias proyecto interesante
23 de julio 1971, el programa D-21B se cerró oficialmente debido a la falta de resultados reales y la presencia de muchos problemas sin solución. Además, en este momento, los Estados Unidos habían creado una agrupación bastante grande de satélites de inteligencia, que diferían de la operación más eficiente del avión no tripulado. Los equipos de nuevos tipos construidos y transferidos al cliente fueron dados de baja. Los bombarderos fueron convertidos al proyecto original y devueltos a las unidades apropiadas.
Dentro de los proyectos D-21A y D-21B, Lockheed construyó prototipos 38. El producto 21 se utilizó en pruebas y durante el servicio militar. Los drones 17 restantes estaban sin trabajo. Primero, fueron enviados para su almacenamiento en la base Norton (piezas de California), desde donde luego fueron transportados al "vertedero" de la base Davis-Monten (piezas de Arizona). Las áreas de almacenamiento para equipos de aeronaves fuera de servicio no están protegidas de miradas indiscretas, debido a lo cual los entusiastas de la aviación pronto notaron "nuevos artículos". Después de esto, el desarrollo más interesante del departamento de Skunk Works se hizo ampliamente conocido.

La cola de la muestra del museo. Foto de Wikimedia Commons
Curiosamente, en algunos materiales, a partir de los años setenta, los drones de reconocimiento se designan como GTD-21B. Por alguna razón, se han agregado letras al nombre original del vehículo, lo que significa "entrenamiento en tierra", "entrenamiento en tierra". Probablemente, de esta manera, la fuerza aérea trató de ocultar el verdadero propósito de los vehículos fuera de servicio. Sin embargo, una mayor divulgación de la información y la aparición de información nueva y más completa hicieron innecesario dicho enmascaramiento.
Más tarde, los drones, que ya no eran necesarios, se distribuyeron entre los museos de aviación de los Estados Unidos. Actualmente, la exposición de varios museos tiene aproximadamente una docena de muestras de este tipo. Ocho vehículos, presentados en museos, pertenecen a la modificación con la letra “B”. En cuanto a la primera modificación de la tecnología, la muestra ubicada en Seattle se monta en el único avión de transporte restante, M-21.
Inicialmente, el objetivo de los diseñadores del departamento de Skunk Works, dirigido por Kelly Johnson, era crear un prometedor vehículo de reconocimiento no tripulado capaz de reemplazar aviones tripulados y reducir los riesgos para el personal. Mediante el uso de ciertos materiales y algunas ideas audaces, los ingenieros lograron crear la técnica requerida. Sin embargo, la falta de ciertas tecnologías y la dificultad de encontrar un reemplazo para ellas no dieron el mejor resultado. Hasta el final de las pruebas y el funcionamiento de la familia D-21, el problema se debía a la dificultad de devolver el contenedor con el equipo y los resultados de la fotografía. No fue posible resolver este problema. Tales problemas en combinación con la complejidad y el alto costo de la tecnología llevaron al abandono de un desarrollo interesante e inusual.
Residencia en:
http://testpilot.ru/
http://airwar.ru/
http://globalsecurity.org/
http://designation-systems.net/
http://airforceworld.com/
http://wvi.com/
Nikolsky M.V. Rayo Negro SR-71. - M .: "Astrel Publishing House", "AST Publishing House", 2001. - (aviones famosos).
información