Aviones no tripulados nacionales (parte 1)
El primer trabajo sobre la creación de vehículos aéreos no tripulados en la URSS comenzó a principios de los años 30 del siglo pasado. Inicialmente cargado con explosivos, controlado por radio drones considerado en el papel de "torpedos aéreos". Se suponía que debían usarse contra objetivos importantes, bien cubiertos por la artillería antiaérea, donde los bombarderos tripulados podrían sufrir grandes pérdidas. El iniciador del inicio del trabajo sobre este tema fue M.N. Tujachevski. El desarrollo de aviones controlados por radio se llevó a cabo en la Oficina Técnica Especial ("Ostekhbyuro") bajo el liderazgo de V.I. Bekauri.
El primer avión en el que se probó el control remoto por radio en la Unión Soviética fue el bombardero bimotor TB-1 diseñado por AN. Tupolev con piloto automático WUA-2. Las pruebas comenzaron en octubre 1933, en Monino. Para el telecontrol de la aeronave en Ostebbyuro, se diseñó el sistema telemecánico de Daedal. Dado que el despegue de una aeronave controlada por radio era demasiado difícil para un equipo muy imperfecto, el TB-1 despegó bajo el control del piloto.

TB-1
En un vuelo de combate real, después del despegue y la retirada de la aeronave en el rumbo hacia el objetivo, el piloto debería haber estado en paracaídas. A continuación, el avión fue controlado por un transmisor VHF desde el avión líder. Durante las pruebas, el principal problema fue el trabajo poco confiable de la automatización, los equipos no funcionaron correctamente y, a menudo, el equipo se negó en absoluto, y el piloto tuvo que tomar el control. Además, los militares no estaban del todo satisfechos con el hecho de que durante el desempeño de la misión de combate, el caro bombardero se perdía irremediablemente. En este sentido, exigieron desarrollar un sistema para la descarga remota de bombas y prever un aterrizaje por radio de la aeronave en su aeródromo.
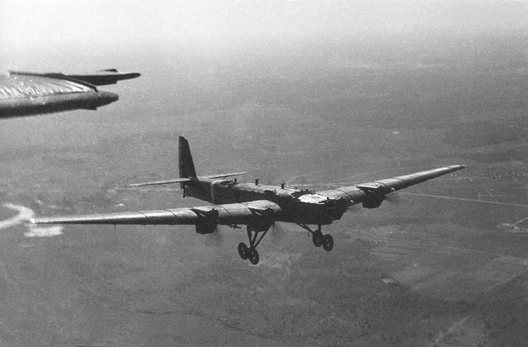
Dado que en medio de 30-x TB-1 ya estaba desactualizado, las pruebas continuaron en un TB-3 de cuatro motores. Se propuso que el problema del funcionamiento inestable del equipo de control se resolviera a expensas de un vuelo tripulado de un avión radio esclavo en la mayor parte de la ruta. Al acercarse al objetivo, el piloto no fue expulsado con un paracaídas, sino que fue transferido al caza I-3 o I-15 suspendido bajo TB-16 y de camino a casa. A continuación, la orientación del TB-3 al objetivo se realizó de acuerdo con los comandos del plano de control.

TB-3
Pero, como en el caso del TB-1, la automatización funcionó de manera extremadamente poco confiable y durante las pruebas del TB-3 controlado por radio se probaron muchas estructuras electromecánicas, neumáticas e hidráulicas. Para corregir la situación en el avión se reemplazaron varios pilotos automáticos con varios actuadores. En julio, se probó el avión con el piloto automático WUA-1934, y en octubre del mismo año, con el piloto automático WUA-3. Al finalizar las pruebas, se suponía que el equipo de control debía usarse en un plano RD operado a distancia ("Registro de rango" - ANT-7 - en una máquina de este tipo, Chkalov voló a través del polo a América).

Avión rd
La aeronave telemecánica entraría en servicio en el año 1937. A diferencia de TB-1 y TB-3, el plano de control no requería un plano de control. El RD, cargado de explosivos, debía volar en modo de control remoto a 1500 km utilizando señales de baliza y atacar a las principales ciudades enemigas. Sin embargo, hasta el final de 1937, no fue posible llevar el equipo de control a una condición de trabajo estable. En relación con la detención de Tukhachevsky y Bekauri, Ostehbyuro se disolvió en enero 1938, y tres bombarderos utilizados para las pruebas fueron devueltos a la Fuerza Aérea. Sin embargo, el tema no se cerró definitivamente, la documentación del proyecto se transfirió a la Planta Experimental de Aviación No. 379, y una parte de los especialistas se trasladaron allí. En noviembre, el 1938 del año en el aeródromo de estepa cerca de Stalingrad, el TB-1 no tripulado hizo que los despegues 17 y el aterrizaje de 22 confirmaran la viabilidad del equipo de control remoto, pero al mismo tiempo en la cabina del piloto, un piloto listo para tomar el control en cualquier momento.
En enero, 1940 del año emitió un decreto del Consejo de Trabajo y Defensa, según el cual se planeó crear un tándem de combate formado por torpedos controlados por radio TB-3 y aviones de control con equipo especial colocado en los bombarderos SB-2 y DB-3. El ajuste del sistema fue con gran dificultad, pero, aparentemente, hubo algún progreso en esta dirección. Al comienzo de 1942, los proyectiles controlados por radio estaban listos para las pruebas de combate.
Bombardero TB-3 en vuelo
El objetivo de la primera huelga fue elegido por un gran cruce ferroviario en Vyazma, a 210 km de Moscú. Sin embargo, “el primer panqueque tenía grumos”: durante la aproximación al objetivo en el DB-3F maestro, la antena del transmisor de radio de los comandos de control falló, según algunas fuentes, fue dañada por un fragmento de un misil antiaéreo. Después de eso, el TB-3 descontrolado, cargado con cuatro toneladas de poderosos explosivos, cayó al suelo. Aviones del segundo par: el comando SB-2 y el TB-3 conducido se quemaron en el campo de aviación después de una explosión cercana de un bombardero preparado para la partida.
Sin embargo, el sistema "Daedalus" no fue el único intento de crear un "torpedo aéreo" en la URSS antes de la guerra. En 1933, en el Instituto de Investigación de Comunicaciones Marítimas bajo la dirección de S.F. Valka comenzó a trabajar en planeadores con control remoto, llevando una carga de explosivos o torpedos. Los creadores de la planificación de vehículos operados remotamente motivaron su idea por la imposibilidad de su detección por detectores acústicos, así como por la complejidad de interceptar el "torpedo aéreo" de los combatientes enemigos, que no es muy vulnerable al fuego antiaéreo debido a su pequeña dimensión y bajo costo de planeadores en comparación con los bombarderos.
En 1934, los modelos de planeador reducido fueron sometidos a pruebas de vuelo. El desarrollo y la construcción de muestras a gran escala se confiaron a P.I. Oskonbyuro. Grokhovsky.
Se planeó crear varios "torpedos voladores", destinados a atacar las bases navales enemigas y los grandes barcos:
1.DT (torpedo de planificación de largo alcance) sin motor con un rango de 30 - 50 km;
2.LTDD (torpedo volador de largo alcance) - con un motor de jet o pistón y una gama de 100 - 200 km;
3.BMP (planeador de la mina remolcada) - en un acoplamiento rígido con un vehículo de remolque de avión.
La producción de un lote experimental de "bombas de torpedo de planificación" destinadas a pruebas se llevó a cabo en la planta piloto de producción N ° 23 en Leningrado, y la creación de un sistema de orientación (nombre en código "Kvant") se asignó al Instituto de Investigación N ° 10 de la Comisaría Popular de la Industria de Defensa. El primer prototipo, designado PSN-1 (planeador especial), salió al aire en agosto 1935. Según el proyecto, el planeador tenía los siguientes datos: peso de despegue - 1970 kg, ala de vuelo - 8,0 m, longitud - 8,9 m, altura - 2,02 m, velocidad máxima - 350 km / h, velocidad de buceo - 500 km / h, rango de vuelo - 30 - 35 km.
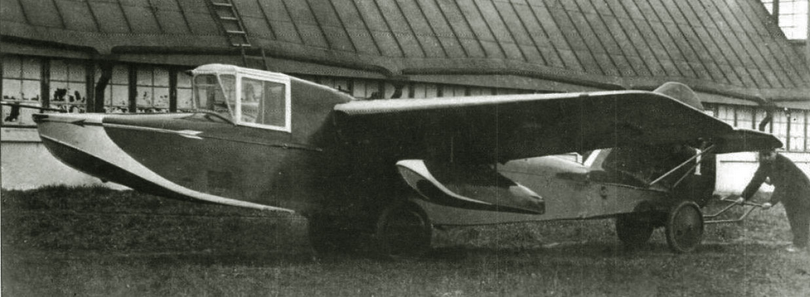
PSN-1
En la primera etapa, se probó una versión tripulada, hecha en forma de planeador. En el rol del operador principal, PSN-1 proporcionó un bombardero de cuatro motores TB-3. Debajo de cada ala de la aeronave era posible suspender un vehículo controlado a distancia.
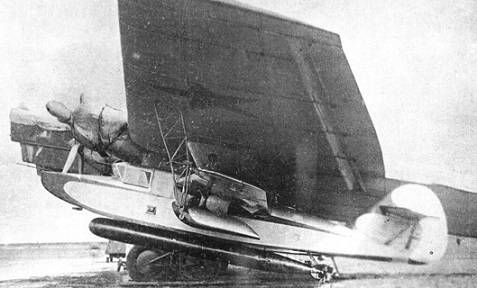
PSN-1 con un torpedo suspendido debajo del ala del bombardero TB-3
La focalización remota de PSN-1 se llevaría a cabo dentro de la línea de visión utilizando un sistema de transmisión de comando infrarrojo. En la aeronave de transporte, el equipo de control se instaló con tres luces de búsqueda infrarrojas, y en el planeador se instalaron un receptor de señal, un piloto automático y un equipo ejecutivo. Los emisores del equipo Kvant se colocaron en un marco giratorio especial que sobresale más allá del fuselaje. Al mismo tiempo, debido a la mayor resistencia, la velocidad del portaaviones se redujo en aproximadamente 5%.
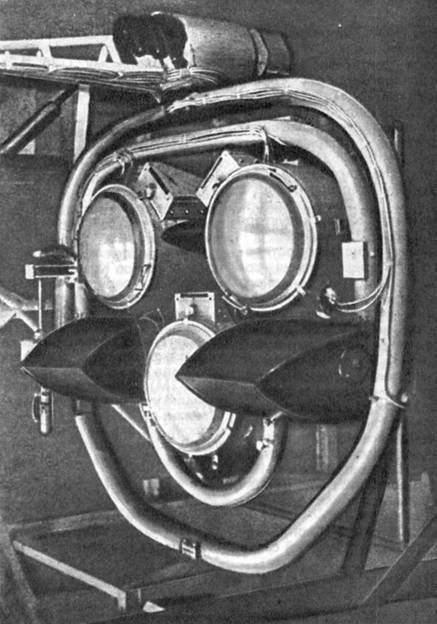
Equipo kvant
Se preveía que incluso sin telecontrol, el planeador podría usarse para atacar a grandes naves o bases navales. Después de dejar caer el torpedo o carga de batalla, se suponía que el planeador, bajo el control del piloto, debía alejarse del objetivo una distancia de 10-12 km y aterrizar en el agua. Después de eso, las alas se soltaron, y el avión se convirtió en un bote. Tras lanzar el motor fueraborda a bordo, el piloto regresó a su base por mar.

Dos PSN-1 bajo el ala del bombardero TB-3
Para los experimentos con planeadores de combate, se seleccionó un aeródromo en Krechevitsy cerca de Novgorod. En un lago cercano, se probó un hidroavión con un enfoque de baja altitud para remolcar el avión flotante P-6.
Durante las pruebas, se confirmó la posibilidad de una inmersión con una bomba, luego de lo cual el planeador entró en vuelo horizontal. 28 de julio 1936, el PSN-1 tripulado fue probado con un simulador de bombas de 250 kg suspendido. 1 de agosto 1936, el vuelo de un planeador con una carga de 550 kg. Después del despegue y desacoplamiento del transportista, la carga se dejó caer desde una inmersión a una altitud de 700 m. Después de eso, el planeador, que se aceleró en una inmersión a 320 km, volvió a ganar altura, giró y aterrizó en la superficie del lago Ilmen. 2 de agosto 1936, el vuelo se realizó con una versión inerte de la bomba FAB-1000. Después de desacoplarse del transportista, el planeador realizó un bombardeo en picado a una velocidad de 350 km / h. Durante las pruebas, resultó que, después de desacoplarse del transportador, PSN-1 a una velocidad de 190 km / h puede planear de forma sostenible con un peso de hasta 1000 kg. El rango de planificación con carga de combate fue 23-27 km, dependiendo de la velocidad y la dirección del viento.
Aunque se confirmaron los datos de vuelo del PSN-1, se retrasó el desarrollo del equipo de guía y piloto automático. A finales de los años 30, las características del PSN-1 no se veían tan bien como en 1933, y el cliente empezó a perder interés en el proyecto. El arresto en 1937 de la gerencia de la Planta No. 23 también jugó un papel en la desaceleración del ritmo de trabajo. Como resultado, en la segunda mitad de 1937, las bases de prueba en Krechevitsy y en el Lago Ilmen fueron liquidadas y todo el atraso se transfirió a Leningrado a la Planta Experimental No. 379. En la primera mitad de 1938 Los especialistas de la Planta No. 379 lograron realizar 138 lanzamientos de prueba de "torpedos aéreos" a velocidades de hasta 360 km / h. También practicaron maniobras antiaéreas, giros, nivelación y descarga de la carga de combate y aterrizaje automático en el agua. Al mismo tiempo, el sistema de suspensión y el equipo para el lanzamiento desde el portaaviones funcionaron a la perfección. En agosto de 1938, se llevaron a cabo vuelos de prueba con éxito con aterrizaje automático en el agua. Pero dado que el portaaviones, un bombardero pesado TB-3, en ese momento ya no cumplía con los requisitos modernos, y la fecha de finalización del trabajo era incierta, los militares exigieron la creación de una versión mejorada y más rápida por control remoto, cuyo portaaviones se suponía que era un prometedor bombardero pesado TB-7 (Pe -8) o bombardero de largo alcance DB-3. Para ello, se diseñó y fabricó un nuevo sistema de suspensión más confiable, que permite la fijación de vehículos de mayor masa. Al mismo tiempo, se llevaron a cabo una amplia gama de pruebas. aviación armas de destrucción: torpedos de aviones, varias bombas incendiarias llenas de mezclas de fuego líquido y sólido, y un modelo de la bomba aérea FAB-1000 de 1000 kg de peso.
En el verano de 1939, comenzó el diseño de un nuevo planeador con control remoto, denominado PSN-2. Como carga de combate, se proporcionó una bomba FAB-1000 que pesaba 1000 kg o un torpedo de la misma masa. El diseñador jefe del proyecto fue nombrado V.V. Nikitin. Estructuralmente, el planeador PSN-2 era un monoplano de dos flotadores con un ala baja y un torpedo suspendido. En comparación con PSN-1, las formas aerodinámicas de PSN-2 se mejoraron significativamente y los datos de vuelo aumentaron. Con un peso de despegue de 1800 kg, un planeador lanzado desde una altura de 4000 m podría cubrir la distancia a 50 km y alcanzar una velocidad en una inmersión a 600 km / h. La envergadura fue 7,0 m y su área - 9,47 m², longitud - 7,98 m, altura en los flotadores - 2,8 m.
Para probar los primeros prototipos se realizaron en una versión tripulada. Los dispositivos de control automático del planeador estaban ubicados en el compartimiento del fuselaje y en la sección central. El acceso a los dispositivos se proporcionó a través de escotillas especiales. Los preparativos para las pruebas de PSN-2 comenzaron en junio del año 1940, al mismo tiempo que se decidió organizar un centro de capacitación para especialistas en capacitación en mantenimiento y el uso de planeadores con control remoto en el ejército.

PSN-2
Cuando se utiliza un motor a reacción, la velocidad de vuelo máxima estimada del PSN-2 fue alcanzar 700 km / h, y el rango de vuelo fue de 100 km. Sin embargo, no está claro cómo a ese rango se suponía que debía dirigir el dispositivo hacia el objetivo, porque el sistema de control infrarrojo era inestable incluso dentro de la línea de visión.
En julio, 1940, la primera copia de PSN-2 se probó en el agua y en el aire. El hidroavión IBR-2 se usó como un remolcador. Sin embargo, debido al hecho de que no se lograron resultados satisfactorios con el sistema de guía remoto, y el valor de combate de los planeadores de combate en una guerra futura parecía dudoso, en julio 19 1940, por orden del Comisario de Marina Kuznetsov, se detuvo todo el trabajo en la planificación de torpedos.
En 1944, el inventor de los "aviones", un bombardero que transportaba aviones de combate, BC Vakhmistrov, propuso un borrador de planeador de combate no tripulado con un piloto automático giroscópico. El planeador se hizo de acuerdo con el esquema de dos haces y podía llevar dos bombas 1000-kg. Habiendo entregado el planeador a un área determinada, el avión apuntó, desenganchó el planeador y luego regresó a la base. Después de que se desacoplara la aeronave, se suponía que el planeador controlado por el piloto automático debía volar hacia el objetivo y, una vez transcurrido el tiempo predeterminado, realizar un bombardeo, no estaba previsto que regresara. Sin embargo, el proyecto no encontró el apoyo de la gerencia y no se implementó.
Al analizar los proyectos soviéticos antes de la guerra de torpedos aéreos, que han llegado a la etapa de pruebas a gran escala, se puede afirmar que se cometieron errores conceptuales en la etapa de diseño. Los diseñadores de aviones sobreestimaron en gran medida el nivel de desarrollo de la radio electrónica soviética y la telemecánica. Además, en el caso de PSN-1 / PSN-2, se eligió un diseño completamente injustificado del planeador reutilizable retornable. Un "torpedo aéreo" de planificación única tendría una perfección de peso mucho mejor, dimensiones más pequeñas y datos de vuelo más altos. Y en el caso de una "bomba voladora" con una ojiva que pesa 1000 kg en las instalaciones portuarias o el buque de guerra del enemigo, todos los costos de fabricación del "proyectil" se compensarían muchas veces.
Los "proyectiles" incluyen la posguerra 10X y 16X, creados bajo la dirección de V.N. Chelomey Para acelerar el trabajo en el diseño de estos dispositivos, se utilizaron los desarrollos alemanes capturados implementados en las "bombas voladoras" Fi-103 (V-1).
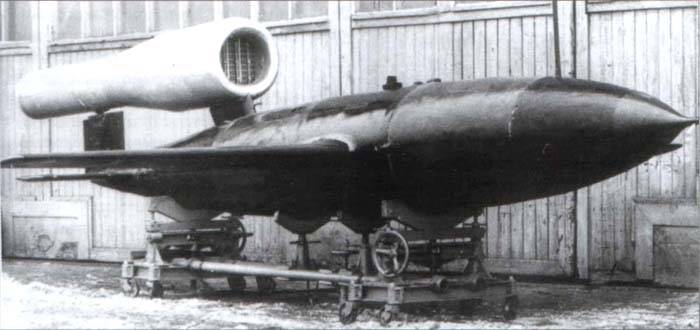
Proyectil con un motor a reacción pulsante 10X
El proyectil, o según la terminología moderna, el misil de crucero 10X se lanzaría desde la aeronave o instalación en tierra de Pe-8 y Tu-2. De acuerdo con los datos de diseño, la velocidad máxima de vuelo fue 600 km / h, el rango fue de hasta 240 km, el peso inicial fue 2130 kg, el peso de la ojiva fue 800 kg. PuVRD D-3– 320 kgf.

Lanzar 10X con bombardero Tu-2
Los proyectiles 10X con sistemas de control inercial podrían usarse para objetos de área grande, es decir, como el V-1 alemán, armas Efectivo en uso masivo solo contra grandes ciudades. En disparos de control, golpear un cuadrado con lados de 5 kilómetros se consideró un buen resultado. Sus ventajas se consideraron muy simples, de alguna manera incluso la construcción primitiva y el uso de materiales de construcción asequibles y económicos.
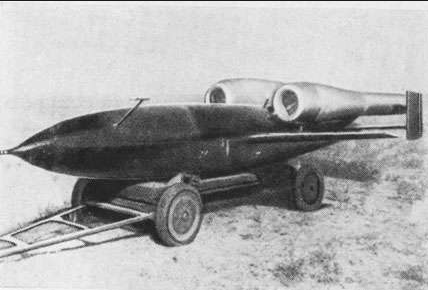
Proyectil 16X
También para las huelgas en las ciudades del enemigo, se diseñó un dispositivo 16X más grande, equipado con dos PUVRD. El bombardero estratégico de cuatro motores Tu-2557, creado sobre la base del estadounidense Superfortress Boeing B-4, iba a ser el portador de un misil de crucero 29. Con un peso de 2557 kg, un aparato con dos FPGD D-14-4 kgNHTX se aceleró a 251 km / h cada uno. El alcance de combate del lanzamiento es de hasta 800 km. La masa de la ojiva - 190 kg.

El avión 16X bajo el ala de un bombardero Tu-4
El desarrollo de misiles de crucero aerotransportados con motores de chorro de aire pulsante continuó hasta el comienzo de los 50-s. En ese momento, los combatientes con una velocidad de vuelo máxima casi sónica ya estaban en servicio, y se esperaba que llegaran interceptores supersónicos armados con misiles guiados. Además, en el Reino Unido y los Estados Unidos, en grandes cantidades, había armas antiaéreas de calibre medio en guiado por radar, que tenían proyectiles de municiones con fusibles de radio. Hubo informes de que el desarrollo activo de sistemas de misiles antiaéreos de largo y mediano alcance está en marcha en el extranjero. En estas condiciones, los misiles de crucero que vuelan directamente a la velocidad de 600-800 km / hy a una altitud de 3000-4000 m eran objetivos muy fáciles. Además, el ejército no estaba satisfecho con la muy baja precisión de golpear el objetivo y la confiabilidad insatisfactoria. Aunque un total de aproximadamente cien misiles de crucero fueron construidos con una EDAR, no fueron aceptados para el servicio, se usaron en varios experimentos y como objetivos aéreos. En 1953, debido al inicio del trabajo en misiles de crucero más avanzados, el desarrollo del 10X y 16X se suspendió.
En la posguerra, los aviones de combate empezaron a llegar a las fuerzas aéreas soviéticas, desplazando rápidamente las máquinas con motores de pistón diseñados durante los años de guerra. En este sentido, algunos de los aviones obsoletos se convirtieron en objetivos controlados por radio, que se utilizaron para probar armas nuevas y con fines de investigación. Entonces, en el año 50, cinco Yak-9V de las series posteriores se convirtieron en una modificación controlada por radio del Yak-9BB. Estos autos fueron convertidos de aviones de doble entrenamiento y fueron diseñados para muestrear en la nube de una explosión nuclear. Los comandos a bordo del Yak-9BB se transmitieron desde el plano de control Tu-2. La colección de productos de fisión se llevó a cabo en góndolas de filtro especiales instaladas en el capó del motor y en los aviones. Pero debido a las fallas en el sistema de control, las cinco aeronaves controladas por radio fueron derrotadas durante las pruebas preliminares y no participaron en las pruebas nucleares.
En las memorias del mariscal de la Fuerza Aérea E.Ya. Savitsky mencionó que los bombarderos controlados por radio Pe-2 al comienzo de 50 se usaron en las pruebas del primer misil aire-aire soviético RS-1 (K-5) con un sistema de guía de comando de radio. Estos misiles en medio de los interceptores armados 50-x MiG-17PFU y Yak-25.

Bombardero Tu-4 de largo alcance
A su vez, los bombarderos pesados controlados por radio Tu-4 participaron en las pruebas del primer sistema soviético de misiles antiaéreos C-25 "Berkut". El 25 de mayo El 1953 del misil guiado B-300 en el sitio de prueba de Kapustin Yar fue derribado por primera vez por un avión objetivo Tu-4 que tenía datos de vuelo y EPR, muy cerca de los bombarderos estadounidenses de gran alcance B-29 y B-50. Desde la creación de un equipo de control totalmente autónomo y de funcionamiento fiable en los 50 de la industria electrónica soviética, resultó ser demasiado difícil de calcular y convertir en objetivos, el Tu-4 despegó con los pilotos en la cabina. Después de que los aviones tomaron el escalón requerido y se acostaron en el campo de combate, los pilotos encendieron el interruptor de comando de radio y dejaron el auto en paracaídas.

El momento de la derrota del misil antiaéreo Tu-4.
Más tarde, al probar nuevos misiles tierra-aire y aire-aire, se convirtió en una práctica común utilizar aviones de combate obsoletos o obsoletos convertidos en objetivos controlados por radio.
El primer drone soviético de la posguerra especialmente diseñado, llevado a la etapa de la producción en masa, fue el "Hawk" de Tu-123. Un vehículo autónomo programado sin piloto, lanzado en producción en serie en mayo 1964, tenía mucho en común con el misil de crucero Tu-121 que no fue adoptado para el servicio. La producción en serie de un avión de reconocimiento no tripulado de largo alcance se masterizó en la planta de aviación Voronezh.

Disposición del Tu-123 con propulsores de combustible sólido
El reconocimiento no tripulado Tu-123 era un monoplano completamente metálico con un ala delta y una cola trapezoidal. El ala, adaptada para la velocidad de vuelo supersónica, tenía un barrido a lo largo del borde delantero del 67 °, a lo largo del borde posterior había un ligero barrido hacia atrás del 2 °. El ala no estaba equipada con medios de mecanización y control, y todo el control del UAV en vuelo tuvo lugar con una quilla giratoria y un estabilizador, y el estabilizador se desvió de forma sincrónica, para el control de inclinación y diferencialmente, para el control de balanceo.
El motor de bajos recursos KR-15-300 se creó originalmente en la Oficina de Diseño de S. Tumansky para el misil de crucero Tu-121 y se diseñó para realizar vuelos supersónicos de gran altitud. El motor había empujado en el dispositivo de poscombustión 15000 kgf, en vuelo el empuje máximo fue 10000 kgf. Vida útil del motor - 50 horas. El lanzamiento del Tu-123 se realizó desde el lanzador ST-30 sobre la base del tractor de cohete de ruedas pesadas MAZ-537, diseñado para transportar cargas de hasta 50 toneladas en semirremolques.
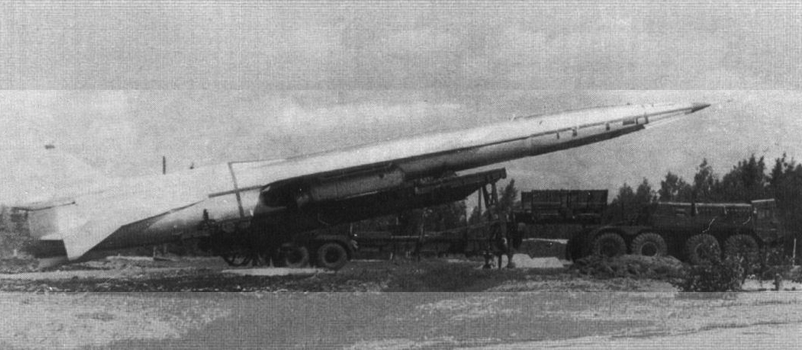
Inteligencia UAV Tu-123 en un lanzador móvil
Para poner en marcha el motor de avión KP-15-300 en el Tu-123, había dos generadores de arranque, que fueron alimentados por un generador de aviación a 537 voltios en el tractor MAZ-28В. Antes del inicio, se produjo el lanzamiento y la aceleración del turborreactor a la velocidad nominal. El lanzamiento en sí se llevó a cabo con dos aceleradores de combustible sólido PRD-52, cada uno con un 75000-80000 kgf, en un ángulo de + 12 ° con respecto al horizonte. Después de que se desarrolló el combustible, los aceleradores se separaron del fuselaje del UAV en el quinto segundo después del arranque, y en el noveno segundo se disparó el colector de admisión de aire subsónico, y el avión de reconocimiento procedió a ascender en altura.

Reconocimiento no tripulado modelo Tu-123 "Hawk", preparado para su lanzamiento en el lanzador CT-30
El vehículo no tripulado con un peso máximo de despegue de 35610 kg tenía a bordo 16600 kg de queroseno de aviación, lo que garantizó el alcance práctico del vuelo de 3560-3680 km. La altitud de vuelo en la ruta a medida que aumentaba la producción de combustible de 19 000 a 22 400 m, que era más que la de la ampliamente conocida aeronave de reconocimiento estadounidense Lockheed U-2. Velocidad de vuelo en la ruta - 2300-2700 km / h.
La gran altitud y la velocidad de vuelo hicieron al Tu-123 invulnerable a la mayoría de las armas de defensa aérea de un enemigo potencial. En 60-70-ies, un dron supersónico de reconocimiento que vuela a tal altura podría atacar a los interceptores supersónicos estadounidenses F-4 Phantom II, equipados con misiles AIM-7 Sparrow de alcance medio, así como el británico Lightning F. 3 y F.6 con misiles Red Top. De los sistemas de defensa aérea disponibles en Europa, solo el pesado MIM-14 Nike-Hércules estadounidense, que era prácticamente estacionario, representaba una amenaza para el "Halcón".
El objetivo principal del Tu-123 era ser inteligencia de foto y radio en la profundidad de la defensa del enemigo a una distancia de hasta 3000 km. Cuando se lanzan desde posiciones en las regiones fronterizas de la Unión Soviética o se despliegan en los países del Pacto de Varsovia, los Hawks podrían llevar a cabo incursiones de reconocimiento en prácticamente todo el territorio de Europa central y occidental. El trabajo del complejo no tripulado se probó repetidamente en numerosos lanzamientos en condiciones poligonales en los ejercicios de las unidades de la Fuerza Aérea, armados con Tu-123.
La composición del equipo a bordo "Yastreb" introdujo una verdadera "tienda de fotografía", que le permite tomar una gran cantidad de imágenes en la ruta de vuelo. Los compartimientos de la cámara estaban equipados con ventanas con vidrio resistente al calor y sistemas de aire acondicionado y soplado, lo cual era necesario para evitar la formación de una "neblina" en el espacio entre los paneles y las lentes de la cámara. El contenedor nasal alojada perspectiva de la cámara aérea AFA-41 / 20M tres cámara aérea prevista AFA-54 / 100M fotómetro fotoeléctrico y SU3 SE-estación de inteligencia electrónica CDS-6RD "Diamond-4A" a los registros de datos del dispositivo. El equipo fotográfico del Tu-123 hizo posible rodar una franja de terreno con un ancho de 60 km y una longitud de hasta 2 700 km, en una escala de 1 km: 1 cm, con una anchura de 40. Las cámaras en la cámara en vuelo se encendieron y apagaron de acuerdo con un programa preprogramado. El reconocimiento radiotécnico se llevó a cabo por dirección para encontrar la ubicación de las fuentes de radiación del radar y el registro magnético de las características del radar del enemigo, lo que permitió determinar la ubicación y el tipo de equipo de radio desplegado del enemigo.

Disposición del compartimento de inteligencia.
Para facilitar el mantenimiento y la preparación para el uso en combate, el contenedor de proa fue tecnológicamente desacoplado en tres compartimentos, sin romper los cables eléctricos. Un contenedor con equipo de reconocimiento se adjuntó al fuselaje con cuatro cerraduras neumáticas. El transporte y almacenamiento del compartimento de la nariz se llevó a cabo en un semirremolque especial cerrado para automóviles. En preparación para el lanzamiento, se utilizaron camiones cisterna, una máquina de preparación de prelanzamiento CTA-30 con un generador, un convertidor de voltaje y un compresor de aire comprimido, y una máquina de arranque y control KCM-123. Un tractor de ruedas pesado MAZ-537® podría ser transportado por un vehículo de reconocimiento no tripulado con un peso en seco de 11450 kg a una distancia de 500 km a una velocidad en carretera a 45 km / h.

El sistema de reconocimiento no tripulado de largo alcance hizo posible recopilar información sobre objetos ubicados en las profundidades de las defensas del enemigo e identificar las posiciones de los misiles operacionales tácticos y balísticos y de crucero de alcance medio. Realizar el reconocimiento de aeródromos, bases navales y puertos, instalaciones industriales, conexiones de barcos, sistemas de defensa aérea del enemigo, así como evaluar los resultados del uso de armas de destrucción masiva.

Después de completar la misión, al regresar a su territorio, el avión de reconocimiento no tripulado fue guiado por las señales de la baliza de conducción. Al ingresar al área de aterrizaje, el dispositivo pasó bajo el control de los controles terrestres. Al ordenarse desde el suelo, subieron, los residuos de queroseno se drenaron de los tanques y el turborreactor se apagó.
Después de la liberación del paracaídas de frenado, el compartimento con equipo de reconocimiento se separó del vehículo y descendió al suelo en un paracaídas de rescate. Para mitigar el impacto en la superficie de la tierra, se produjeron cuatro amortiguadores. Para facilitar la búsqueda del compartimiento del instrumento en él, después de aterrizar, la radiobaliza comenzó a funcionar automáticamente. Las partes centrales y de la cola y durante el descenso en el paracaídas de arrastre se colapsaron debido a golpear el suelo y no eran adecuados para su uso posterior. El compartimiento del instrumento con equipo de reconocimiento después del mantenimiento podría instalarse en otro UAV.
A pesar de las buenas características de vuelo del Tu-123 fue virtualmente una vez, eso con un peso de despegue suficientemente grande y un costo significativo limitó su uso masivo. En total, el complejo de reconocimiento 52 se fabricó y se entregaron a las tropas hasta el año 1972. Los exploradores Tu-123 estuvieron en servicio hasta el año 1979, después del cual algunos de ellos fueron utilizados en el proceso de entrenamiento de combate de las fuerzas de defensa aérea. El rechazo del Tu-123 se debió en gran parte a la adopción del avión supersónico de reconocimiento MiG-25Р / РБ, que al comienzo de 70-s demostró ser efectivo durante los vuelos de reconocimiento sobre la península del Sinaí.
To be continued ...
Residencia en:
http://diletant.media/articles/25704406/
http://www.chaskor.ru/article/rosijskie_bespilotniki_istoriya_padeniya_15266
http://www.tinlib.ru/transport_i_aviacija/tehnika_i_vooruzhenie_1993_02/p9.php
http://www.airwar.ru/enc/glider/psn2.html
http://www.airwar.ru/weapon/ab/10x.html
http://www.airwar.ru/enc/spy/tu123.html
http://www.krasfun.ru/2015/10/sistema-dalnej-bespilotnoj-razvedki-tu-123-dbr-1-yastreb-sssr/
información