Aviación no tripulada doméstica (parte de 2)

Como ya se mencionó en la primera parte de la revisión, en los primeros años de la posguerra, se utilizaron activamente aviones controlados por radio con motores de pistón para garantizar la prueba de nuevos tipos de armas y el entrenamiento de combate de las fuerzas de defensa aérea. Sin embargo, el avión construido durante la Segunda Guerra Mundial, en su mayor parte, tenía un recurso muy pequeño, y la mayoría de ellos cayó en mal estado unos años después del final de la guerra. Además, debido al rápido ritmo de desarrollo aviación A fines de la década de 40 y principios de la década de 50, las pruebas y el entrenamiento requerían objetivos correspondientes a la velocidad de vuelo correspondiente a los modernos aviones de combate de un enemigo potencial. Durante las pruebas más críticas, se utilizaron los cazas MiG-15, MiG-17 controlados por radio y los bombarderos Il-28 que volaban fuera de sus recursos. Pero era bastante costoso volver a equipar los autos en serie, y además, había muy pocos aviones que fueran lo suficientemente modernos en ese momento para que los objetivos se usaran como objetivos.
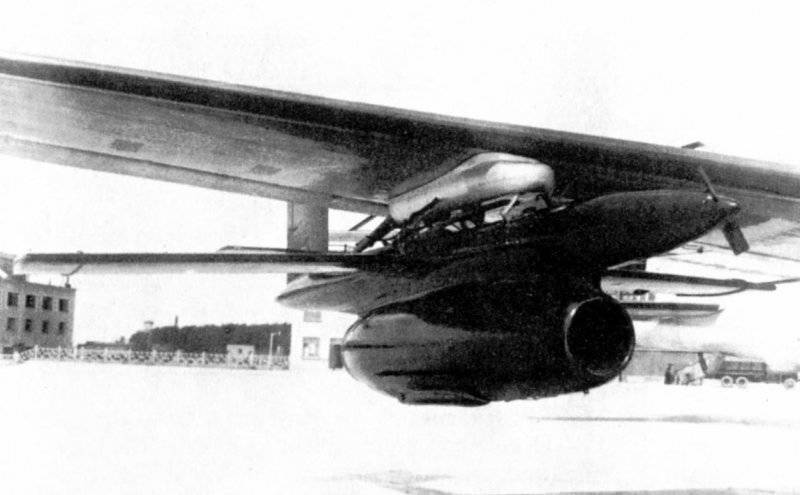
En este sentido, en 1950, el Comandante de la Fuerza Aérea Marshal K.A. Vershinin propuso crear un objetivo controlado por radio. En junio, se emitió un decreto gubernamental, según el cual este trabajo se confió a OKB-301 bajo la dirección de S.A. Lavochkin Se prestó especial atención a la reducción del costo del producto, diseñado para una "salida". Al diseñar un objetivo controlado por radio que recibió la designación preliminar "Producto 201", los especialistas de OKB-301 tomaron el camino de la máxima simplificación. Para el avión objetivo, eligieron un motor a reacción directo RD-900 (diámetro 900 mm), que funcionaba con gasolina. Con un peso seco del motor 320 kg, el empuje calculado a la velocidad de 240 m / sy la altura de los medidores de 5000 fue 625 kgf. El ramjet RD-900 tenía un recurso de aproximadamente 40 minutos. No había bomba de combustible en el aparato, el combustible del tanque era suministrado por un sistema de inyección que funcionaba desde un acumulador de presión de aire. Para simplificar al máximo la producción, el ensamblaje del ala y la cola se realizaron en línea recta. Para alimentar el equipo de comando de radio, se utilizó un generador de CC con una unidad de turbina eólica en la nariz del dispositivo. Las partes más caras del "Producto 201" fueron el equipo de control de radio y el piloto automático AP-60. La aparición del objetivo no tripulado resultó bastante discreta, pero correspondía completamente a su propósito. Para lanzar objetivos aéreos, estaba destinado a utilizar un bombardero de cuatro motores de largo alcance Tu-4, un objetivo podría colocarse debajo de cada avión.

Tu-4 con objetivos no tripulados colgando
Las pruebas de vuelo de "Productos 201" comenzaron en mayo 1953, en el campo de pruebas cerca de Akhtubinsk. Las pruebas estatales terminaron en octubre 1954. Durante las pruebas, logramos obtener la velocidad máxima de 905 km / hy el práctico techo - medidores 9750. El tanque de combustible 460 l para una aeronave no tripulada solo era suficiente para los minutos de vuelo de 8,5, mientras que el motor a reacción se lanzó de manera confiable a altitudes 4300 - medidores 9300. De acuerdo con los resultados de la prueba, los militares recomendaron aumentar el tiempo de actividad del motor a minutos de 15, aumentar el EPR al montar reflectores de esquina e instalar marcadores en las puntas de las alas.
La principal desventaja fue la larga preparación del dispositivo para su uso. Especialmente laboriosa fue la suspensión en el avión de transporte. No fue posible lograr un funcionamiento confiable del sistema de rescate de paracaídas durante las pruebas.

Para guardar el objetivo con el propósito de reutilizarlo, se decidió plantarlo desde la planificación hasta el motor debajo del fuselaje. Las pruebas de vuelo confirmaron que era posible, pero después de un aterrizaje de este tipo, debido a la deformación de la góndola del motor, fue necesario reemplazar un motor de ramjet.
La 17 en un carro
Después de la adopción oficial del "Producto 201" recibió la designación La 17. La producción en serie del objetivo se estableció en la planta número 47 en Orenburg. Las entregas de las primeras máquinas de producción comenzaron en el año 1956. Para el uso del La-17 en la Planta de Aviación de Kazan No. 22, se perfeccionaron seis bombarderos Tu-4. La construcción en serie del La-17 duró hasta el año 1964, el programa de producción incluyó la producción de objetivos no tripulados por año para 300.
La 17 bajo el ala del Tu-4
El objetivo era bastante satisfactorio para su propósito, pero al final de los 50-s quedó claro que el pistón Tu-4 pronto será dado de baja, y el sistema de lanzamiento aéreo requiere demasiado tiempo para prepararse para su uso y es bastante caro. Los militares querían ampliar las capacidades del objetivo y reducir los costos operativos. Como resultado, los desarrolladores llegaron a la idea de la necesidad de reemplazar el ramjet con un motor turborreactor y la transición para comenzar desde un lanzador de tierra.
La xnumx
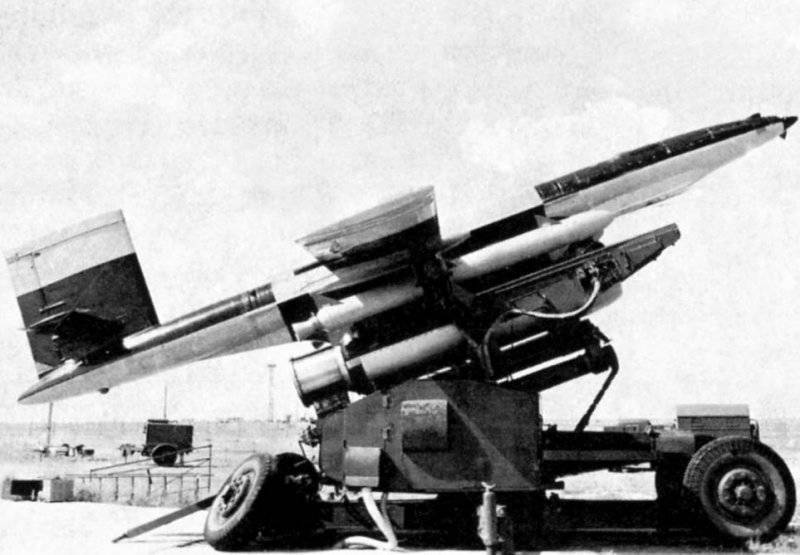
En 1958, comenzó la producción del objetivo La-17М con el turborreactor 9 kgf turbojet RD-2600BK y el lanzamiento por tierra. TRD RD-9BK fue una modificación del motor RD-9B agotado, eliminado del caza MiG-19. El lanzamiento tuvo lugar con la ayuda de dos propulsores de combustible sólido, y se usó un cañón antiaéreo 100-mm KS-19 de cuatro ruedas como un lanzador remolcado.

Lanzar La Xnumx
En 1962, el La-17 se actualizó nuevamente. Para las pruebas y el proceso de entrenamiento de combate de los cálculos del sistema de defensa aérea, los objetivos requeridos pueden volar en el rango de alturas: 0,5 - 18 km, cambiar la reflectividad del objetivo para simular misiles de crucero, así como los bombarderos tácticos y estratégicos. Para hacer esto, se instaló el motor RD-9BKR con mayor altitud en el avión objetivo, y se colocó una lente Lüiberg en el fuselaje trasero. Gracias al aumento de ESR, el rango de rastreo del radar terrestre 3-6 aumentó de 150 - km 180 a 400 - km 450, y se expandió el tipo de aeronave simulada.
Para poder reutilizar el La-17MM modernizado, después del lanzamiento, se modificó el sistema de aterrizaje. En la parte trasera del fuselaje, se instaló una carga descargada conectada por un cable con un cheque que, cuando se sacó, el piloto automático movió el objetivo a un gran ángulo de ataque a la altura mínima de diseño y, al mismo tiempo, el motor se detuvo. En paracaídas, el objetivo aterrizó en esquís con amortiguadores colocados debajo de la góndola TRD.
Dado que las existencias de los motores RD-9 se agotaron rápidamente, en lugar de ellos, en el 70-s comenzó a instalar TRD P-11K-300, convertido de P-11F-300 agotado, instalado en los aviones MiG-21, Su-15 y Yak-28 . El objetivo con motores del tipo P-11K-300 se designó como La-17K y se produjo en serie hasta el final del 1992 del año.
La 17K en el lanzador
A pesar de que los objetivos de la familia La 17 en este momento son, sin duda, obsoletos e incapaces de imitar los medios modernos de ataque aéreo, hasta hace poco se han utilizado en sitios de prueba durante el control y entrenamiento de los cálculos de defensa aérea.

Después de adoptar el objetivo no tripulado La-17 con un ramjet RD-900, surgió la cuestión de crear un avión de reconocimiento no tripulado basado en este vehículo. Un decreto del gobierno sobre este tema se emitió en junio 1956. Sin embargo, el objetivo con un motor a reacción de flujo directo tuvo un corto alcance, y para la implementación práctica del proyecto, se rompió solo después de la aparición del La-17M con TRD RD-9BK 1900 kgf.
Las cámaras AFA-BAF / 2K y AFA-BAF-21 se colocaron en el compartimiento delantero del avión de reconocimiento. El piloto automático fue reemplazado por AP-63. Para la comodidad de transportar el reconocimiento de la consola del ala hecha plegable. El vehículo de reconocimiento no tripulado del transporte y lanzador CATP-1 en el chasis del ZIL-134K se lanzó con dos aceleradores de lanzamiento de propelente sólido PRD-98, y se rescató en paracaídas con un aterrizaje en la góndola del motor. Reflectores de esquina colocados debajo del carenado de la radio. Ala del ala y fuselaje, desmontados.
Durante las pruebas estatales, que finalizaron en el verano de 1963, se demostró que la máquina puede realizar reconocimiento fotográfico a una distancia de 60 km desde la posición de lanzamiento, volando a altitudes de hasta 900 m, ya una distancia de 200 km, a una altitud de 7000 m. 680 - 885 km / h. Peso de partida - 3600 kg.
La 17P en el lanzador
En 1963, el La-17R como parte del complejo TBR-1 (avión de reconocimiento táctico no tripulado) se puso en servicio formalmente, pero la operación en el ejército comenzó solo en la segunda mitad de los años 60. Esto se debió al hecho de que requería el refinamiento de las estaciones de seguimiento y control en tierra para el reconocimiento. drone.
Se preveía que el complejo de reconocimiento táctico no tripulado del explorador TBR-1 podría ser lo suficientemente móvil, con un tiempo de despliegue aceptable en la posición de lanzamiento. El complejo incluye: vehículo de motor de arrastre KrAZ-255, la instalación de partida SATR-1, camiones de transporte Toutry-1, el vehículo remolcado ZIL-157 o ZIL-131, vehículo especial KATP-1 para el equipo de prueba previa al lanzamiento avión de reconocimiento y proporcionar motor de propulsión lanzamiento , así como las estaciones de radio comando y radiolocalización MRV-2M y Kama para controlar los aviones de reconocimiento no tripulados en la ruta de vuelo. Un escuadrón separado de aviones de reconocimiento no tripulados también tenía un pelotón técnico operacional, equipado con vehículos especiales para trabajar con cámaras, grúas de camiones y otros equipos, así como una unidad que aseguraba el aterrizaje de La-17P en un área determinada y la recuperación de la placa de materiales de reconocimiento y la evacuación de la aeronave.
Después de actualizar las capacidades del avión de reconocimiento no tripulado La-17RM, equipado con el motor P-11K-300, se han ampliado. El rango a gran altitud aumentó de 200 a 360 km. Además de los equipos de inteligencia fotográfica actualizados en forma de cámaras AFA-40, AFBA-40, AFA-20, FFT-21, ASChFA-5M y la cámara de televisión Chibis, se agregó la estación Sigma de reconocimiento de radiación al equipo a bordo. En la Fuerza Aérea Soviética, el La-17РМ se operó hasta la mitad de los 70-s, después de lo cual los objetivos no tripulados se "utilizaron" en los sitios de prueba como aviones objetivo.
Se entregaron varias modificaciones de La-17 a los países aliados de la URSS. En 50-s, los objetivos no tripulados con un motor ramjet se podrían cumplir en los sitios de prueba chinos. Al igual que en la URSS, fueron lanzados desde los bombarderos Tu-4. A diferencia de la fuerza aérea soviética, los bombarderos con motor de pistón volaron en la República Popular de China hasta el comienzo de los 90-s. Al final de su carrera, el chino Tu-4 se usó como portador de vehículos aéreos no tripulados de reconocimiento. En 60, la industria de la aviación china lanzó el La-17 con un motor turborreactor WP-6 (una copia china del RD-9). Este turborreactor se usó en la Fuerza Aérea de PLA en aviones de combate J-6 (copia del MiG-19) y aviones de ataque Q-5. Además del suministro de la aeronave objetivo y de la documentación técnica para su producción en masa en la República Popular de China, se transfirió a Siria un lote de aviones de reconocimiento no tripulados La-17РМ con la designación UR-1. Sin embargo, se desconoce si se utilizaron en una situación de combate.
Adopción de un bombardero de reconocimiento táctico supersónico MiG-25РБ, cuya aviónica, que además de varios equipos fotográficos, incluía estaciones de reconocimiento electrónico, fue adoptada por las fuerzas aéreas soviéticas, que amplió enormemente las capacidades para recopilar información en la retaguardia operativa del enemigo. Como se sabe, al comienzo de los 70, los israelíes no lograron obstruir el vuelo de MiG-25Р y MiG-25РБ sobre la península del Sinaí. Pero los expertos soviéticos eran plenamente conscientes de que cuando operan en el teatro, donde habrá sistemas de defensa aérea de largo alcance y gran altura, la gran altitud y la velocidad de vuelo ya no pueden garantizar la invulnerabilidad de los aviones de reconocimiento. En este sentido, al final del 60-x el ejército inició el desarrollo de aviones de reconocimiento a nivel táctico no tripulados supersónicos y reutilizables. Los militares requerían vehículos con mayor alcance y velocidad de vuelo que aquellos en servicio con el La-17Р / РМ. Además, un complejo de dispositivos de reconocimiento muy primitivo creado sobre la base de un objetivo no tripulado no cumplía con los requisitos modernos. El cliente quería obtener exploradores capaces de actuar en la profundidad de la defensa del enemigo a una velocidad de crucero nearsonic. Además de los medios modernos para fijar información visual, el equipo destinado al reconocimiento de la radiación del terreno y la apertura de los sistemas de defensa aérea y las estaciones de radar formaría parte del equipo de reconocimiento de los vehículos prometedores.
En medio de las 60-ies, el desarrollo de los complejos de inteligencia táctica Strizh y Reis comenzó en la Oficina de Diseño de Tupolev. El resultado de este trabajo fue la creación y adopción del complejo táctico operacional Tu-141 (BP-2 "Swift") y el complejo táctico Tu-143 (BP-3 "Reis"). El sistema de reconocimiento de inteligencia táctico-operacional no tripulado BP-2 está diseñado para realizar operaciones de reconocimiento a una distancia de varios cientos de kilómetros desde el punto de lanzamiento, mientras que Reis BP-3 km es 30-40 km.
En la primera etapa de diseño, se previó que un avión de reconocimiento no tripulado atravesaría las líneas de defensa aérea a baja altura a velocidades supersónicas. Sin embargo, esto requería motores equipados con cámaras de poscombustión, lo que inevitablemente condujo a un mayor consumo de combustible. El ejército también insistió en que el reconocimiento no tripulado de una nueva generación, al regresar de una partida de combate, debería aterrizar en su propio campo de aviación mediante un esquí especial fabricado. Pero los cálculos mostraron que la alta velocidad de vuelo y el aterrizaje de aeronaves, con un aumento en la efectividad del combate, aumenta significativamente el costo del dispositivo, a pesar de que la duración de su vida en la guerra podría ser muy corta. Como resultado, la velocidad máxima de vuelo estuvo limitada por el límite de 1100 km / h, y se decidió aterrizar utilizando un sistema de rescate de paracaídas, que a su vez simplificó el diseño y redujo el peso y el costo de despegue de la aeronave.

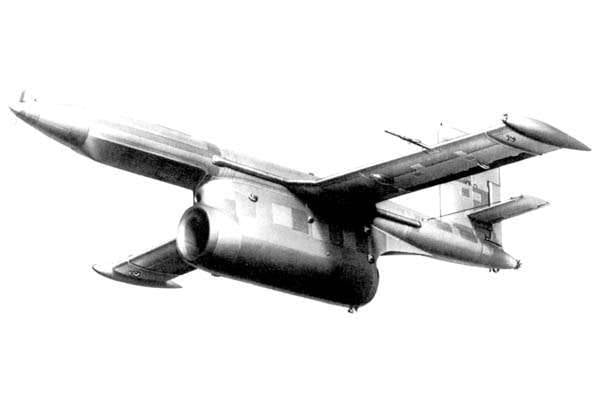
Reconocimiento no tripulado Tu-141 y Tu-143 en el Museo de Monino
Reconocimiento no tripulado Tu-141 y Tu-143 tenían mucho en común, pero diferían en dimensiones geométricas, peso, rango, composición y capacidades del equipo de reconocimiento a bordo. Ambos dispositivos fueron construidos de acuerdo con el esquema "sin cola" con un ala triangular de poca altura con un barrido a lo largo del borde de ataque 58 °, con pequeñas superposiciones en las partes de la raíz. En frente del fuselaje hay un desestabilizador trapezoidal fijo, que proporciona el margen de estabilidad necesario. PGO: reorganizado en el suelo en el rango de 0 ° a 8 °, según el centrado de la aeronave, con un ángulo de barrido en el borde delantero 41,3 °. El control de la aeronave se llevó a cabo utilizando elevones de dos piezas en el ala y el timón. La entrada de aire del motor está ubicada sobre el fuselaje, más cerca de la sección de la cola. Tal disposición no solo facilitó la configuración de un complejo de lanzamiento, sino que también redujo la visibilidad del radar de un avión de reconocimiento no tripulado. Para reducir la envergadura del ala al transportar la consola del ala, el Tu-141 se desvió a una posición vertical.
Las primeras copias del Tu-141 estaban equipadas con un TRD P-9A-300 de corta duración (una modificación especialmente modificada del TRD RD-9B), pero más tarde, después del establecimiento de la producción en masa, cambiaron al lanzamiento del avión de reconocimiento con motores KR-17А con motores 2000. Un avión de reconocimiento no tripulado con una masa de despegue de 5370 kg, a una altitud de 2000 m, desarrolló una velocidad máxima de 1110 km / hy tenía un alcance de 1000 km. La altitud mínima de vuelo en la ruta era 50 m, el techo - 6000 m.

Iniciar Tu-141
El lanzamiento del Tu-141 se llevó a cabo utilizando un acelerador de arranque de combustible sólido montado en la parte inferior del fuselaje. El aterrizaje no tripulado de reconocimiento después de la asignación se realizó utilizando un sistema de paracaídas, ubicado en el carenado en el fuselaje trasero por encima de la boquilla del motor turborreactor. Después de apagar la TRD, se produjo un paracaídas de frenado, reduciendo la velocidad de vuelo a un valor en el cual el paracaídas principal podría ser liberado de manera segura. El tren de aterrizaje de triciclo con elementos amortiguadores de tacón se produjo simultáneamente con el paracaídas de freno. Inmediatamente antes de tocar el suelo, se produjo la inclusión de un motor de combustible sólido de freno y el disparo de un paracaídas.

El complejo de instalaciones en tierra incluyó máquinas diseñadas para reabastecimiento de combustible y preparación para lanzamiento, instalación de lanzamiento remolcado, instalaciones de control y prueba y hardware para trabajar con equipos de reconocimiento. Todos los elementos del complejo "Strizh" de BP-2 se colocaron en un chasis móvil y pudieron moverse en vías públicas.

Desafortunadamente, no se pudieron encontrar datos exactos sobre la composición y las capacidades del complejo de reconocimiento de Strizzh BP-2. Varias fuentes afirman que el Tu-141 estaba equipado con equipo de navegación, cámaras aéreas, un sistema de reconocimiento por infrarrojos, medios para determinar los tipos y coordenadas de los radares operativos y producir reconocimiento de radiación, perfecto para su época. En la ruta, el avión de reconocimiento no tripulado fue controlado por el piloto automático, las maniobras y el equipo de reconocimiento de encendido y apagado se llevaron a cabo de acuerdo con un programa predeterminado.
Las pruebas de vuelo del Tu-141 comenzaron en el año 1974, debido a la alta complejidad del complejo de reconocimiento que requería la coordinación y el refinamiento del equipo a bordo y en tierra. La producción en serie del avión no tripulado comenzó en el año 1979 en la planta de aviación de Kharkov. Antes del colapso de la URSS, una copia 152 de un Tu-141 fue construida en Ucrania. Escuadrones de reconocimiento separados equipados con aviones de reconocimiento no tripulados de este tipo se desplegaron en las fronteras occidentales de la URSS. En este momento, Tu-141 viable solo puede estar disponible en Ucrania.
En el momento de su creación, el complejo de inteligencia BP-2 "Swift" era totalmente coherente con su propósito. El vehículo de reconocimiento no tripulado poseía capacidades suficientemente amplias y tenía buenas posibilidades de cumplir la misión, lo que se confirmó repetidamente en los ejercicios. Una cierta cantidad de Tu-141 con el recurso de vuelo agotado se volvió a convertir en objetivos M-141. El complejo objetivo recibió la designación BP-2В.
De acuerdo con el esquema de diseño y las soluciones técnicas, el reconocimiento no tripulado Tu-143 fue una especie de copia reducida del Tu-141. El primer vuelo exitoso del Tu-143 tuvo lugar en diciembre 1970. En 1973, se colocó un lote experimental de UAV para realizar pruebas estatales en la fábrica de aeronaves en Kumertau. La adopción oficial del Tu-143 ocurrió en el año 1976.

Tu-143
El vehículo de reconocimiento no tripulado con un peso de lanzamiento de 1230 kg se lanzó desde el lanzador móvil SPU-143 en el merengue del tractor de ruedas BAZ-135MB. El Tu-143 se cargó en el lanzador y se evacuó del lugar de aterrizaje utilizando una máquina de transporte TZM-143. La entrega y almacenamiento de UAVs se llevaron a cabo en contenedores sellados. El rango de reubicación de un complejo con un reconocimiento preparado para su lanzamiento es de hasta 500 km. Al mismo tiempo, las instalaciones técnicas de tierra del complejo podrían moverse a lo largo de la carretera a una velocidad de - hasta 45 km / h.

Carga del reconocimiento Tu-143 en el lanzador y el lanzador SPU-143 utilizando la máquina de carga y transporte TZM-143
El mantenimiento del UAV se llevó a cabo utilizando el complejo de control y prueba KPK-143, un conjunto de equipos móviles para repostar una grúa, bomberos y camiones. El prelanzamiento, que ocupaba las minas 15, fue llevado a cabo por el equipo de combate de SPU-143. Inmediatamente antes del lanzamiento, el motor principal del turborreactor TRZ-117 se lanzó con una carga máxima de 640 kgf, y el vehículo de reconocimiento no tripulado se lanzó con el acelerador de combustible sólido SPRD-251 en un ángulo de 15 ° con respecto al horizonte. La separación segura del SPRD-251 fue proporcionada por un cartucho pirotérmico especial, activado por la caída de presión de los gases en el acelerador de arranque.

Iniciar Tu-143
El complejo de reconocimiento BP-3 "Vuelo", que fue creado originalmente por orden de la Fuerza Aérea, fue ampliamente utilizado en las fuerzas armadas de la URSS, y también fue utilizado por las Fuerzas Terrestres y la Armada. En el curso de ejercicios conjuntos a gran escala de varias ramas de las fuerzas armadas, el complejo Reis demostró ventajas significativas en comparación con los aviones de reconocimiento táctico tripulados MiG-21P y Yak-28P. El vuelo del Tu-143 se realizó en la ruta programada utilizando un sistema de control automático, que incluía un piloto automático, un radioaltímetro y un medidor de velocidad. El sistema de control proporcionó un acceso de vehículos no tripulados más preciso al sector de reconocimiento, en comparación con los aviones de reconocimiento táctico tripulados de la Fuerza Aérea. El UAV de reconocimiento pudo volar a baja altitud a velocidades de hasta 950 km / h, incluso en áreas con terreno complejo. El tamaño relativamente pequeño proporcionó al Tu-143 con baja visibilidad visual y una pequeña ESR, que, combinada con datos de vuelo elevados, convirtió al drone en un objetivo muy difícil para los sistemas de defensa aérea.

El equipo de reconocimiento estaba ubicado en la punta reemplazable y tenía dos opciones principales: una foto y una fijación de televisión de la imagen en la ruta. Además, se podría colocar en el avión no tripulado un equipo de reconocimiento de radiación y un contenedor con folletos. El complejo de “Vuelo” BP-3 con un UAV Tu-143 pudo realizar un reconocimiento aéreo táctico a la luz del día a una profundidad de 60-70 km desde la línea frontal utilizando equipos de foto, televisión y radiación de fondo. Al mismo tiempo, se detectaron objetivos de Wereal y puntos en el ancho de banda de 10 H (altitud de vuelo H) cuando se usan cámaras y 2,2 H cuando están equipados con equipos de inteligencia de televisión. Es decir, el ancho de la fotografía desde una altura de 1 km fue aproximadamente 10 km, filmación de televisión - aproximadamente 2 km. Los intervalos de fotografía para la inteligencia fotográfica se establecieron dependiendo de la altura del vuelo. El equipo fotográfico instalado a la cabeza del avión de reconocimiento desde una altura de 500 my una velocidad de 950 km / h permitió reconocer objetos en el suelo desde el tamaño de 20 cm. El complejo de reconocimiento resultó ser muy efectivo en condiciones de uso en áreas montañosas con arranques y aterrizajes en plataformas a altitudes de hasta 2000. m sobre el nivel del mar y durante los sobrevuelos de montaña hasta 5000 m. El equipo de televisión a bordo transmitió una imagen de televisión del área por aire a la estación de control de drones. La recepción de la imagen de televisión fue posible a una distancia de 30-40 km desde el UAV. El ancho de banda del reconocimiento de radiación alcanza 2 H y la información obtenida también se puede transmitir al suelo por radio. El equipo de reconocimiento Tu-143 incluía una cámara aérea panorámica PA-1 con una reserva de película 120 y equipo de TV I-429B Chibis-B y equipo de reconocimiento de radiación Sigma-R. También se consideró la creación de un misil de crucero basado en el Tu-143, pero no hay datos sobre las pruebas de esta modificación y su adopción para el servicio.
Antes de aterrizar en un área determinada, el Tu-143 simultáneamente con la parada del motor produjo un deslizamiento, después de lo cual se liberaron el chasis y el sistema de paracaídas de dos etapas. Cuando se tocó el suelo, cuando se activaron los amortiguadores del tren de aterrizaje, se dispararon el paracaídas de aterrizaje y el motor del freno, lo que impidió que la aeronave de reconocimiento se volcara debido a la resistencia del paracaídas. La búsqueda del lugar de aterrizaje del avión de reconocimiento no tripulado se llevó a cabo mediante señales de la radiobaliza a bordo. Además, el contenedor con la información de reconocimiento se sacó y el UAV se entregó a una posición técnica para la preparación para la reutilización. El recurso Tu-143 fue diseñado para cinco salidas. El procesamiento de materiales fotográficos se realizó en un punto móvil de recepción y descifrado de la información de inteligencia UNDER-3, después de lo cual los datos recibidos se transmitieron en línea a través de canales de comunicación.
Según la información publicada en fuentes abiertas, teniendo en cuenta los prototipos destinados a las pruebas, en el período comprendido entre 1973 y 1989 se compilaron más de 950 de Tu-143. Además de las fuerzas armadas soviéticas, el complejo "Vuelo" BP-3 estaba en servicio en Bulgaria, Siria, Irak, Rumania y Checoslovaquia.

Tu-143 en la exposición del museo de aviación en la República Checa
En 2009, los medios informaron que Bielorrusia había adquirido un lote de UAV en Ucrania. Se utilizaron aviones de reconocimiento no tripulados en operaciones de combate reales en Afganistán y durante la guerra Irán-Irak. En 1985, un caza israelí F-143 derribó al sirio Tu-16 en el Líbano. Al comienzo del 90, la RPDC compró varios Tu-143 en Siria. Según fuentes occidentales, la contraparte norcoreana se ha lanzado a la producción en masa y ya se ha utilizado durante los vuelos de reconocimiento sobre la zona de aguas de Corea del Sur en el Mar Amarillo. Según los expertos occidentales, las copias norcoreanas del Tu-143 también pueden usarse para entregar armas destrucción masiva.
Al final de las 90-s, el Tu-143, disponible en Rusia, se reequipó masivamente en objetivos M-143 diseñados para simular los misiles de crucero en el proceso de entrenamiento de combate de las fuerzas de defensa aérea.

Preparación para el uso del avión de reconocimiento no tripulado ucraniano Tu-143
En el momento del inicio de la confrontación armada en el sureste de Ucrania en la APU, había un número de UAV Tu-141 y Tu-143 en almacenamiento. Antes del comienzo del conflicto, su operación fue asignada al 321-th escuadrón separado de aeronaves de reconocimiento no tripuladas desplegadas en la aldea de Raukhovka, distrito de Berezovsky, región de Odessa.

Tu-143 que realizó un aterrizaje no autorizado en un área controlada por la milicia de la RPD
Los vehículos aéreos no tripulados retirados de la conservación se utilizaron para el reconocimiento fotográfico de las posiciones de la milicia. Antes de que se anunciara la tregua en septiembre 2014, los drones construidos en la URSS exploraron un área de más de 250 000 ha. Haber tomado fotografías de objetos 200, incluidos los bloqueos de 48 y más objetos de infraestructura 150 (puentes, diques, intersecciones, secciones de caminos). Sin embargo, el equipo de instrumentos de los vehículos aéreos no tripulados de fabricación soviética ahora está totalmente desactualizado: se utiliza una película fotográfica para registrar los resultados del reconocimiento, el dispositivo debe regresar a su territorio, la película debe retirarse, entregarse al laboratorio, desarrollarse y descifrarse. Por lo tanto, la inteligencia en tiempo real no es posible, el intervalo de tiempo desde el momento de la encuesta hasta el uso de los datos puede ser significativo, lo que a menudo deprecia el resultado de la exploración de objetivos móviles. Además, la confiabilidad técnica de la tecnología, creada hace unos 30 hace muchos años, deja mucho que desear.
En fuentes abiertas, no hay estadísticas de misiones de combate del ucraniano Tu-141 y Tu-143, pero se publicaron muchas fotos de vehículos aéreos no tripulados en las posiciones y durante el transporte realizado en el 2014 de verano y otoño del año. Sin embargo, en la actualidad, no se publican nuevas imágenes de vehículos aéreos no tripulados de Ucrania de este tipo, y el DPR militar y el LPR no informan sobre sus vuelos. En este sentido, se puede suponer que las existencias de Tu-141 y Tu-143 en Ucrania están casi agotadas.
Poco después de la adopción del complejo de inteligencia Reis BP-3, se emitió una Resolución del Consejo de Ministros de la URSS sobre el desarrollo del complejo BP-ZD mejorado Reis-D. El primer vuelo del prototipo UAV Tu-243 tuvo lugar en julio 1987. Mientras se mantenía la estructura del avión, el complejo de reconocimiento experimentó un refinamiento sustancial. En el pasado, los militares criticaron el "Vuelo" de BP-3 por su capacidad limitada para transmitir información de inteligencia en tiempo real. En este sentido, además de la cámara aerotransportada PA-243, se instaló el equipo avanzado de televisión “Aist-M” en el Tu-402. En otra variante, destinada a realizar el reconocimiento nocturno, se utiliza el sistema de imágenes térmicas Zima-M. La imagen recibida de la televisión y las cámaras de infrarrojos se transmite a través de un canal de radio organizado por medio del equipo de radio “Route-M”. Paralelamente a la transmisión por aire, la información durante el vuelo se registra en los medios magnéticos a bordo. Los nuevos equipos de reconocimiento más sofisticados, en combinación con las características mejoradas del UAV, permitieron un aumento significativo en el área en estudio en un vuelo del territorio al tiempo que mejoraron la calidad de la información recibida. Gracias al uso del nuevo complejo de navegación y vuelo NPK-243 en el Tu-243, las capacidades de BP-ZD "Reis-D" han aumentado significativamente. En el curso de la actualización, también se actualizaron algunos elementos del complejo de tierra, lo que permitió aumentar la eficiencia de las tareas y las características operativas.

Tu-243 en el espectáculo aéreo MAKS-99
De acuerdo con la información presentada en la feria aeroespacial MAKS-99, el vehículo no tripulado de reconocimiento Tu-243 tiene un peso de despegue de 1400 kg, una longitud de 8,28 m, una envergadura de 2,25 m. 117 km / h. La altitud máxima de vuelo en la ruta es 640 m, la mínima es 850 m. La distancia de vuelo se incrementa a 940 km. El lanzamiento y el método de aplicación del Tu-5000 son similares al Tu-50. Este avión de reconocimiento al final del 360-x se ofreció para la exportación. Se afirma que el ejército ruso adoptó oficialmente el Tu-243 en 143, y que su construcción en serie se llevó a cabo en las instalaciones de la planta de producción de aviación de Kumertau. Sin embargo, aparentemente, el número de Tu-90 construidos fue muy pequeño. De acuerdo con los datos presentados por The Military Balance 243, hay una cierta cantidad de UAV Tu-1999 en servicio con el ejército ruso. No se sabe cuánto es cierto, pero en este momento el complejo de reconocimiento VR-ZD "Reis-D" ya no cumple con los requisitos modernos.
To be continued ...
Residencia en:
https://militarizm.livejournal.com/51079.html
http://zonwar.ru/news/news_110_Tu-141_Strish.html
http://www.arms-expo.ru/articles/124/81839/
http://aviation21.ru/3582-2/
http://rusvesna.su/news/1406935390
http://nevskii-bastion.ru/tu-243-maks-1999/
https://defendingrussia.ru/enc/bpla/tu143_krylataja_raketarazvedchik-1531/
http://www.arms-expo.ru/049055055056124052052048048.html
https://militarizm.livejournal.com/51079.html
https://vpk.name/library/reys-d.html
http://www.razlib.ru/transport_i_aviacija/aviacija_i_kosmonavtika_2004_01/p3.php
http://todaysmilitary.ru/2016/01/21/vnutri-tajnoj-programmy-bpla-severnoj-korei/
información