Evolución de los sistemas de control de las primeras naves espaciales soviéticas

Modelo de "Sputnik-1" con una demostración de dispositivos internos. Foto del Museo de la Cosmonáutica
Es difícil imaginar una nave espacial moderna, desechable o reutilizable, nacional o extranjera, sin un complejo sistema de control construido sobre la base de computadoras de alto rendimiento. Sin embargo, esto no siempre fue así. Las primeras naves espaciales de diseño soviético no tenían ningún sistema de control. Luego aparecieron los primeros dispositivos simples en los dispositivos, y su mayor evolución condujo a la aparición de computadoras multifuncionales completas.
A lo largo de un camino dado
Las sondas y los dispositivos nacionales y extranjeros utilizados en los primeros experimentos e investigaciones en el campo de la tecnología espacial y de cohetes no tenían sistemas de control completos. A bordo había dispositivos de automatización para unidades y sistemas individuales, pero no se proporcionó la posibilidad de un control de vuelo completo. Además, en ese momento no había necesidad de ellos.
Por ejemplo, el primer satélite terrestre artificial SP-1 (Sputnik-1), lanzado en octubre de 1957, tenía a bordo un paquete de baterías, un transmisor de radio, un conjunto de sensores y equipo de refrigeración. No había dispositivos para determinar las coordenadas y la posición en el espacio, así como el control de vuelo. Se suponía que el satélite se movería a lo largo de la trayectoria determinada cuando fue lanzado.

Modelo de "Sputnik-2". En la minúscula había una "cabaña" con un lugar para un perro. Foto de Wikimedia Commons
El próximo Sputnik-2 se construyó de acuerdo con un principio similar, cuya carga útil era el contenedor con el perro Laika. A bordo había instrumentos solo para recopilar y transmitir datos sobre el estado del animal. Sin embargo, también se preveía la automatización de algunos procesos, como el enfriamiento de un contenedor habitable.
mando a distancia
Incluso en la etapa de estudio preliminar, quedó claro que la tecnología espacial prometedora debería tener ciertos medios de control. Independientemente o por orden de la Tierra, los satélites deben encender instrumentos, realizar investigaciones, etc. Tales problemas de diseño ya se resolvieron a principios de 1958 cuando se creó la próxima nave espacial.
En mayo de 1958, el Sputnik-3 u objeto D entró en órbita. Por primera vez en la práctica doméstica, este dispositivo recibió los medios de control automático y remoto. El complejo de instrumentación a bordo podría recibir y ejecutar comandos desde la estación de control en tierra. Había 12 instrumentos científicos para diversos propósitos a bordo, que se encendían y apagaban por comando o por un dispositivo de programa de tiempo a bordo. Además, en ciertas partes de la órbita, donde no había conexión con la Tierra, se encendía automáticamente la grabación de telemetría en cinta magnética. Una vez que se restableció la conexión, se transmitió la información registrada.
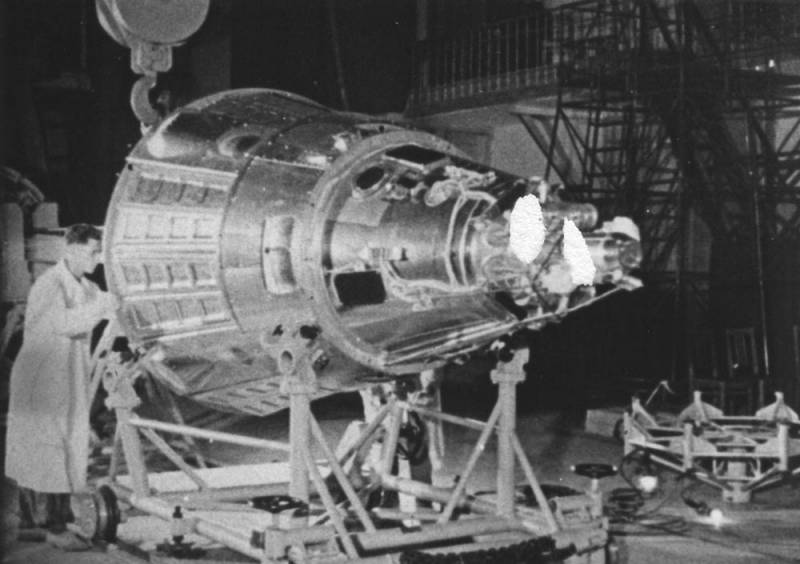
"Sputnik-3" / "D" en la etapa de montaje. Foto de RGANTD
Pronto, el control remoto por comando de radio se utilizó en el campo de la investigación interplanetaria. A partir del otoño de 1958, la URSS hizo varios intentos de enviar estaciones interplanetarias automáticas a la Luna. Los primeros lanzamientos terminaron en accidentes, y recién en enero de 1959, el Luna-1 AMS pudo pasar cerca del satélite natural de la Tierra. En septiembre del mismo año, la nave espacial Luna-2 aterrizó en la luna por primera vez, difícilmente, con la destrucción de la estructura.
A bordo de los primeros productos Luna había un conjunto de instrumentos de medición para diversos fines, dispositivos para monitorear su funcionamiento, así como una estación de radio para recibir comandos y transmitir telemetría. Para el vuelo a la Luna, se instalaron estaciones en el llamado. bloque "E" - la tercera etapa del cohete portador "Vostok-L" con la posibilidad de control remoto. La unidad fue responsable de llevar el AMS a la trayectoria calculada.
Después del lanzamiento, el vuelo del cohete Vostok-L con el Luna fue rastreado desde tierra por un equipo de radar, originalmente creado para probar misiles balísticos. Los datos de trayectoria fueron recibidos y procesados por un sistema informático especial basado en la máquina BESM-2. Cuando el producto "E" con la "Luna" se desvió de la trayectoria óptima, el complejo se formó y le transmitió comandos para corregir la trayectoria. En general, dicho sistema funcionó bien, aunque hubo errores.
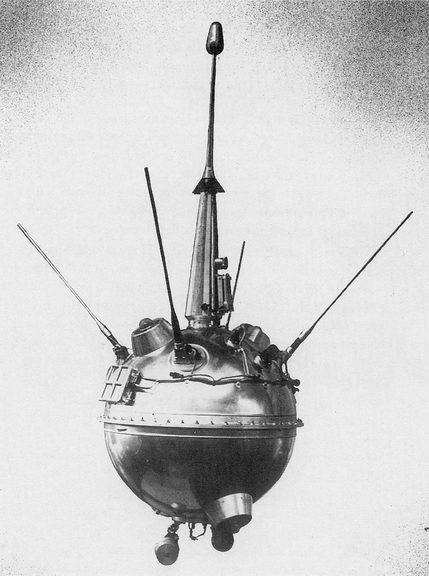
Estación automática "Luna-2". Foto de Wikimedia Commons
Nuevas funciones
Las primeras naves espaciales solo podían volar a lo largo de una trayectoria precalculada, que era lanzada por un vehículo de lanzamiento o etapa superior. Para el desarrollo posterior de los programas espaciales, fue necesario desarrollar algunas herramientas de control que permitieran orientar el aparato en el espacio y realizar maniobras.
Los primeros éxitos en esta dirección se obtuvieron durante el desarrollo del Luna-3 AMS, que se lanzó con éxito en octubre de 1959. Para esta estación se creó un original sistema de orientación fototelemétrica Chaika. Incluía elementos ópticos que determinaban la posición del Sol y la Luna en relación con el AMS, un dispositivo informático y motores de maniobra. El equipo científico de la estación, como antes, funcionó según el programa establecido o los comandos del centro de control.
Fue la presencia del sistema "Chaika" lo que permitió a "Luna-3" fotografiar el satélite natural de la Tierra, incl. su reverso. En el futuro, los desarrollos de este sistema y sus ideas principales se utilizaron activamente en otros proyectos de tecnología espacial.
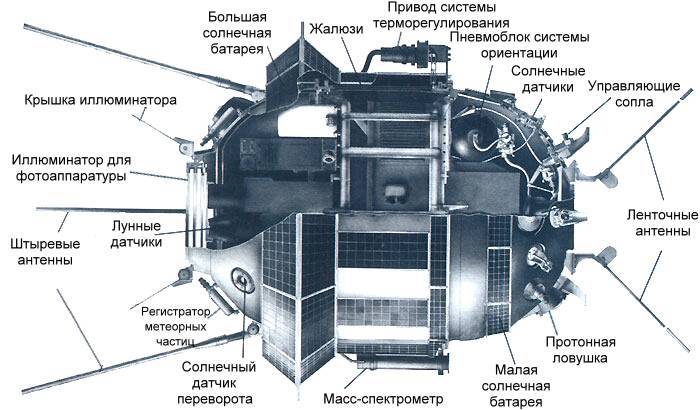
"Luna-3" con el sistema de orientación "Seagull". Gráficos Astronaut.ru
Control autónomo
Desde 1957, ha estado en marcha el desarrollo de una prometedora nave espacial tripulada, posteriormente llamada Vostok. Recibió sistemas de control automático y manual que se duplicaban entre sí. Todos los medios se distinguieron por una cierta simplicidad y correspondieron a las tareas establecidas. Entonces, el equipo permitió realizar la orientación en órbita y realizar el descenso. Otras funciones estaban virtualmente ausentes. Para la orientación en el espacio, la nave disponía de un conjunto de motores de baja potencia controlados por un automatismo o por un astronauta.
La alineación horizontal se realizó mediante sensores infrarrojos. A lo largo del eje de la órbita, la nave fue guiada por el Sol (automáticamente) o por la Tierra, utilizando el dispositivo Vzor (manualmente). Independientemente o bajo comando, la automatización podría realizar un descenso desde la órbita utilizando un sistema de propulsión de frenado. Se le pidió al cosmonauta que realizara estas tareas utilizando el dispositivo de navegación Globus, que calculó el área de aterrizaje aproximada.
En mayo de 1960 tuvo lugar el primer lanzamiento de un Vostok experimental en una configuración no tripulada. El dispositivo con la designación "Sputnik-4" no pudo regresar a la Tierra debido a una falla en el sistema de orientación. Luego se llevaron a cabo varios lanzamientos más, incl. con una carga útil en forma de equipo científico, animales y maniquíes. Por ejemplo, el 19 de agosto de 1960, los famosos Belka y Strelka fueron al espacio. Por razones obvias, estos vuelos utilizaron solo control automático y remoto.

El panel de instrumentos de la nave espacial tripulada "Vostok". Foto de Wikimedia Commons
Finalmente, el 12 de abril de 1961 se realizó el primer vuelo del Vostok en configuración tripulada. Bajo el control del primer piloto-cosmonauta del mundo, Yu.A. La nave de Gagarin completó una órbita y regresó con éxito a la Tierra. Durante los próximos dos años, se realizaron cinco lanzamientos más de la nave espacial Vostok con astronautas y una gran cantidad de pruebas no tripuladas. Todas estas actividades confirmaron la operatividad de los nuevos sistemas de control.
Ordenador de a bordo
Ya durante el desarrollo de la nave espacial Luna o Vostok, los especialistas soviéticos estaban trabajando en nuevas formas de desarrollar sistemas de control para naves espaciales y AMS. Entonces, a fines de los años cincuenta, comenzó la investigación sobre el tema del envío de naves espaciales a Marte. En un principio, el trabajo se realizó en el marco del programa 1M.
El uso del control de comando por radio en dicho programa quedó virtualmente excluido. Las herramientas automatizadas separadas, como en proyectos anteriores, también tenían sus inconvenientes. En este sentido, se decidió crear el llamado. una unidad de cálculo basada en una computadora central a bordo, a la que se conectarían todos los demás sistemas AMS. Además, la tarea de crear SRB se resolvió con éxito con la introducción de nuevas soluciones y una base de componentes moderna. De hecho, se trataba de un único ordenador de a bordo que realiza todas las tareas durante el vuelo.
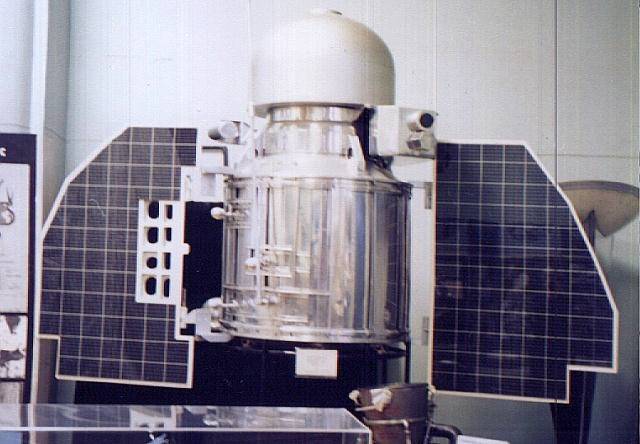
AMS "Mars-1960" con una computadora de a bordo completa. Foto de Wikimedia Commons
Como parte del programa 1M, se construyeron dos estaciones Mars-1960. Tuvieron que volar automáticamente cerca de Marte, recopilar datos científicos y transmitirlos a la Tierra. El lanzamiento de ambos AMS tuvo lugar en octubre de 1960 y ambos lanzamientos terminaron en accidentes: las estaciones se quemaron en la atmósfera. No fue posible probar el SRB en vuelo.
Sin embargo, los desarrollos sobre la idea de SRB no han desaparecido. Pronto comenzó el desarrollo de la "nave interplanetaria pesada" TMK, que también se decidió equipar con un solo complejo informático. Este proyecto no se vio coronado por el éxito, pero sus desarrolladores lograron avanzar nuevamente en la creación de computadoras para el espacio.
Finalmente, como parte del trabajo de TMK, finalmente se formó y elaboró el concepto de una única computadora a bordo responsable de todas las operaciones y de ayudar a la tripulación. Pronto, este concepto se utilizó en la creación de la nave espacial tripulada Soyuz, las estaciones orbitales Salyut y una serie de otros proyectos.
Uno de los bloques de la primera computadora a bordo de la nave espacial Soyuz. Foto habr.com
procesos evolutivos
En las décadas de XNUMX y XNUMX, el desarrollo de los cohetes y la esfera espacial avanzó a gran velocidad. Los eventos clave que determinaron el desarrollo posterior de la cosmonáutica ocurrieron con una regularidad envidiable y, a menudo, estuvieron separados por unos pocos meses. Al mismo tiempo, se empleó en la industria una gran cantidad de empresas y especialistas de diferentes áreas, lo que contribuyó a la rápida solución de problemas.
Estas tendencias están bien ilustradas por la evolución de los sistemas de control para naves y naves espaciales. Entonces, en 1957, el Sputnik-1 entró en órbita sin ningún medio de control, y ya en 1960, se fabricó y lanzó un AMS con una computadora de a bordo multifuncional. Al mismo tiempo, se formaron las ideas y conceptos principales, que todavía se usan en la astronáutica, pero ya en el nivel técnico moderno.
información