Espectro acústico de un dron

Internet está lleno de grabaciones del zumbido de cuadricópteros, del aullido de geranios que se acercan y del traqueteo de Orlans. Estas grabaciones se realizan en formato MP3 comprimido o similar, que puede perder algunos detalles debido a la compresión de datos, pero para fines de simple referencia son bastante adecuados.
Comencemos grabando un quadcopter.
La señal registrada en representación temporal (esto es lo que se puede ver en un osciloscopio) parece, como siempre, confusa.
Con un aumento mayor, se puede observar una periodicidad inestable de la amplitud total.

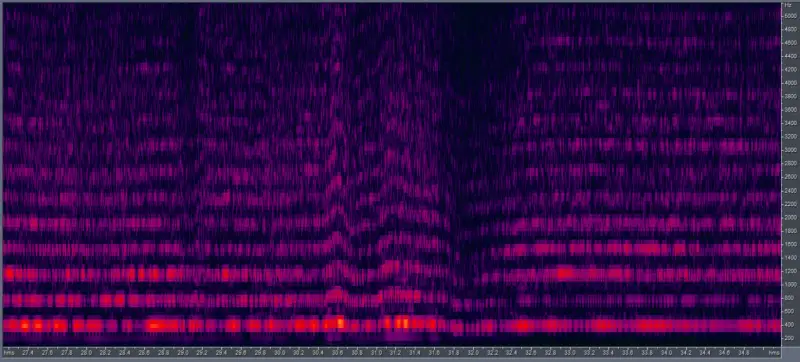
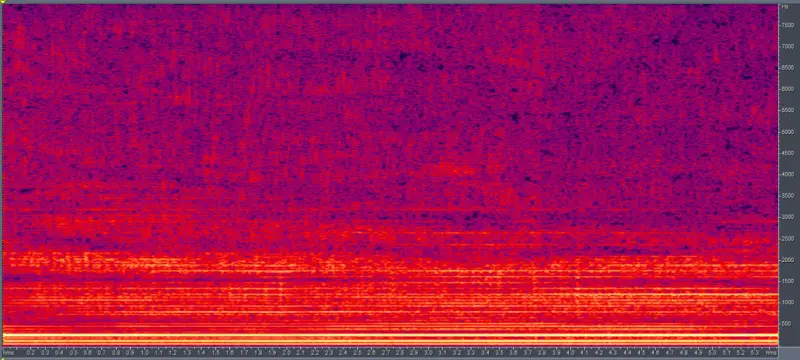
Pero para entender lo que hay dentro, es necesario mirar la imagen espectral. En general, se ve así.
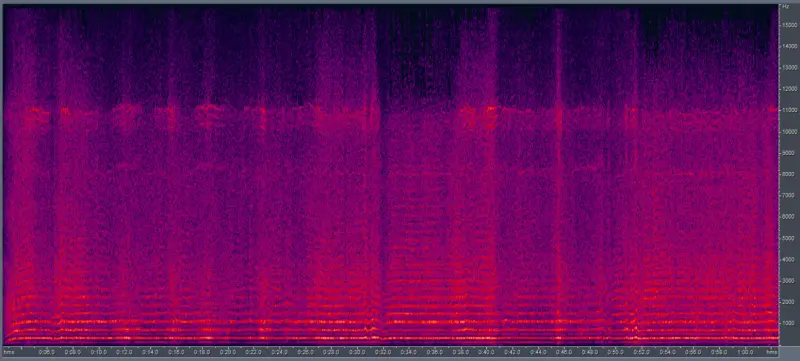
Horizontal es el tiempo, vertical es la frecuencia y el brillo es la amplitud de la señal a una frecuencia determinada en un momento determinado.
Aquí vemos un montón de líneas paralelas equidistantes. Estos son los armónicos de la señal de audio. La distancia entre ellos en tales señales se llama tono fundamental. Obviamente, el tono principal es algún tipo de producto de la velocidad del motor y el número de palas de la hélice, con posible influencia adicional en la interacción de las palas de las hélices adyacentes. Puedes ver cómo cambia la velocidad del motor durante las maniobras.
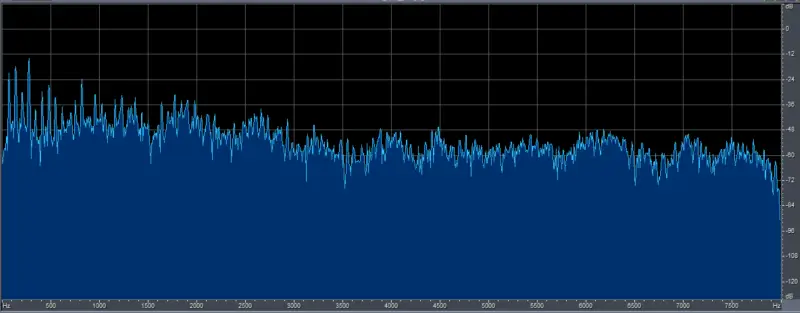
Si hacemos una sección del espectrograma, en una sección separada podemos ver lo siguiente.
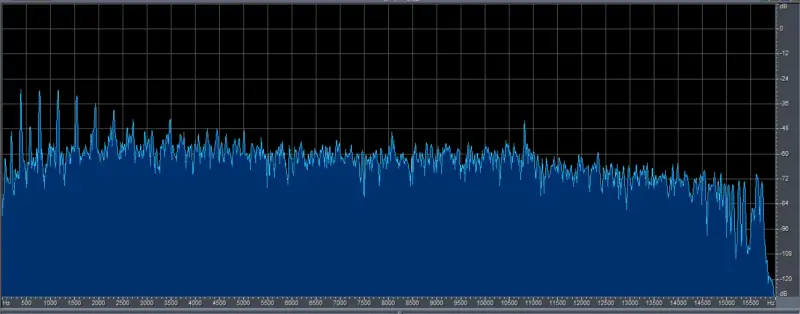
Hay cierta ambigüedad aquí. O aquí en el lado izquierdo hay una fuerte división en armónicos pares e impares, o ha salido algo de los subarmónicos.
Se pueden introducir análisis espectrales adicionales tanto para aumentar la resolución de frecuencia como para reducirla. En el primer caso, esto nos dará una mejor resolución en frecuencia a expensas de la resolución en el tiempo. La acción inversa también es valiosa. Con una mayor resolución de frecuencia, se puede ver cómo, al maniobrar el helicóptero, esto se debe al desequilibrio de las velocidades del motor, que se manifiesta en la división de las bandas de frecuencia.
Al reducir la resolución de frecuencia, podemos ver claramente los detalles temporales.
Se puede observar que las amplitudes de los armónicos parpadean.
Traza acústica de "Geranio"
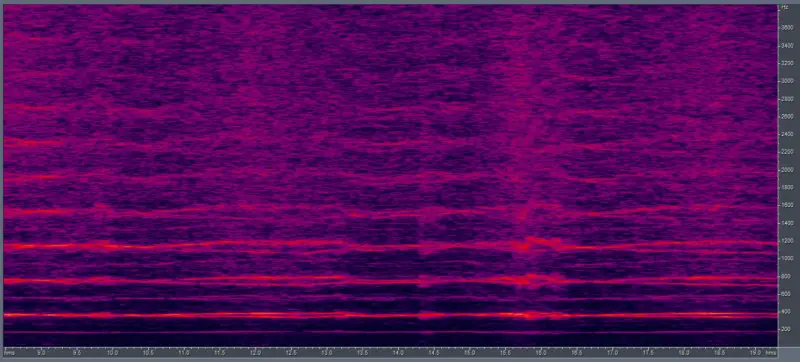
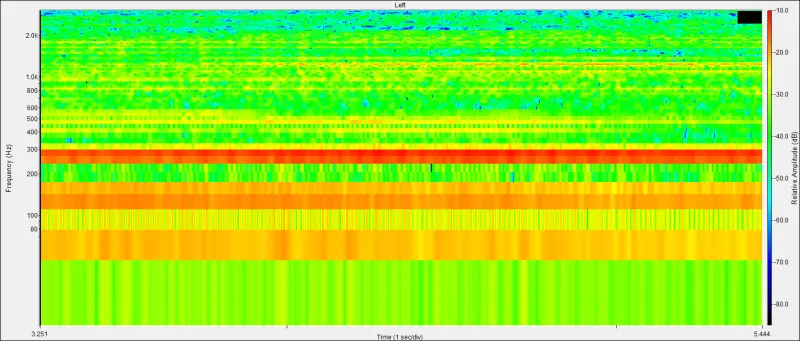
Aquí vemos un espectrograma de resolución de alta frecuencia del pico de aproximación y final. zumbido.
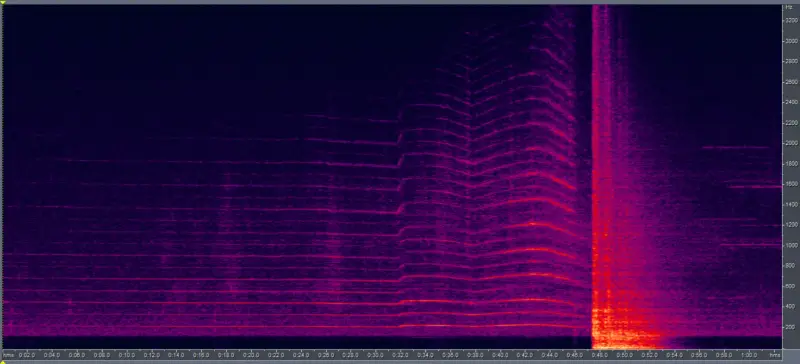
Hay muchas cosas interesantes en la imagen.
Comencemos con el hecho de que la distancia entre las barras espectrales es de 113 Hz (antes de la sección de inmersión), y la barra espectral armónica fundamental no es visible debido al filtrado de la señal del micrófono del teléfono móvil. Esta frecuencia es el producto de la velocidad del motor, el número de cilindros, el coeficiente de distribución de fases de escape y la frecuencia del reloj del motor.
Vale la pena señalar que los armónicos pares tienen mayor amplitud que los impares.
Para aquellos que tienen experiencia en electrónica, debería quedar claro qué señales periódicas producen un aumento en los armónicos pares.
Con una resolución temporal creciente (y una resolución frecuencial decreciente), está claro que
que las amplitudes armónicas son inestables.
Si tuviéramos que detectar la aproximación de un dron de este tipo, tendríamos que hacerlo en la parte de baja frecuencia del espectro, ya que allí se concentra la energía principal del espectro sonoro del motor. Nuestro oído es extremadamente insensible a la parte de baja frecuencia del espectro. Nuestros micrófonos, obviamente, tampoco están diseñados para parámetros elevados para funcionar en una zona cercana al infrasonido.
Mientras tanto, el sonido en estas frecuencias experimenta una atenuación mínima y puede viajar largas distancias (los elefantes y las ballenas lo saben bien).
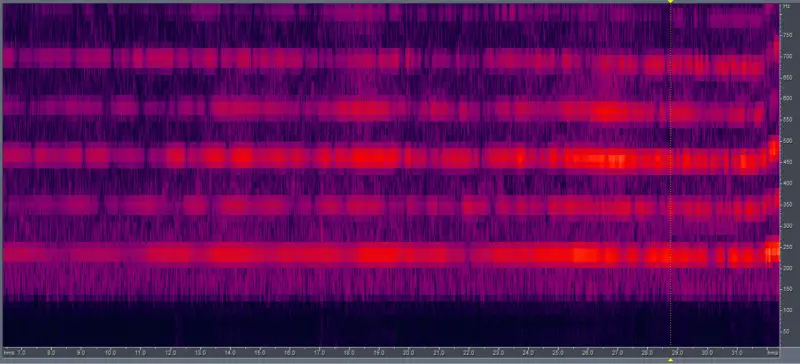
Bueno, ahora echemos un vistazo a "Orlan".
Aquí también destacan los armónicos pares del tono fundamental, en este caso 68 Hz. Son ligeramente más grandes que los números pares, al menos en el rango de frecuencia más bajo.
El espectro bastante rico aquí se explica por el hecho de que la grabación se realizó antes de que el dron despegara en algún borde del bosque y a corta distancia. Toda la parte superior del espectro aún no ha tenido tiempo de evaporarse.
El valor de esta grabación es que el primer armónico no ha sido eliminado mediante filtrado.
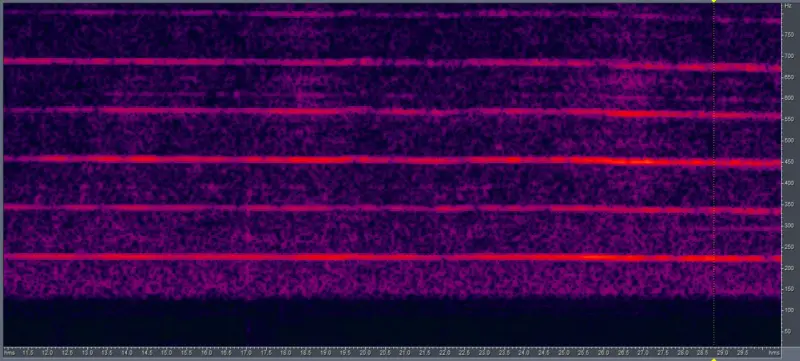
Utilizando una escala de frecuencia logarítmica, se puede identificar la parte más baja del espectro.
En este caso, las fluctuaciones en la amplitud del primer armónico (68 Hz) pueden explicarse por el funcionamiento del controlador de velocidad del motor del dron.
Algunas conclusiones
1. La idea de detectar el paso de un dron por la acústica que emite está en el aire desde hace bastante tiempo. Recientemente ha habido informes de que en Ucrania se ha construido y está funcionando una red de este tipo de 8 teléfonos móviles. Está lejos de ser un hecho que esta red ucraniana no entre en territorio ruso. Momentos de planchado particularmente intenso de nuestra Ucrania aviación Puedo saberlo, por ejemplo, por el ruido de los aviones pesados por la noche o por la mañana.
Aunque no me hago ilusiones sobre la resistencia al pirateo de ordenadores o teléfonos inteligentes, es posible insertar un código específico en teléfonos inteligentes que ya están en el nivel de Google Play. Por ejemplo, todos los elementos básicos para el procesamiento acústico inicial están disponibles en los populares mensajeros de voz. Si nos limitamos al procesamiento constante de un rango de frecuencia limitado de hasta 1,5 a 2 kHz, esto ni siquiera creará una carga significativa en el procesador.
2. Además de la tarea de detectar enemigos. drones, también es posible el objetivo opuesto de reducir la firma acústica de nuestros drones. Por ejemplo, en electrónica, cuando no es posible reducir la amplitud de las líneas espectrales, se puede intentar difuminarla y reducir las propiedades mediante las cuales se realizará la interacción.
3. Lo que se puede obtener de todo lo anterior depende en gran medida de quienes lo hagan. Menciono esto porque de 1983 a 2012 trabajé en institutos de investigación y oficinas de diseño y vi bastante la realidad allí, donde el público local estaba recortando presupuestos de manera primitiva y estúpida.
Ahora trabajo en una gran empresa privada. De vez en cuando, este coloso, nuestra empresa, se involucraba en cuestiones y problemas técnicos nada triviales... En esos momentos, claramente comenzaba a sentir que el tiempo corría. En las primeras fases de la solución de problemas tan complejos, el horror era claramente visible en los ojos de los especialistas involucrados...
Pero son precisamente estas tareas las que brindan grandes oportunidades a quienes pueden resolver problemas de manera rápida, altamente eficiente y con alta calidad.
información