Zoorobótica: una nueva generación de robots parecidos a bestias está a punto de abandonar los laboratorios.
Hasta hace poco, la mayoría robots podría dividirse aproximadamente en dos tipos. Los widgetóforos eran dispositivos de garras, cubos y ruedas que consistían solo en partes esenciales y no pretendían ser diferentes de otras máquinas (piense en el robot R2-D2 de Star Wars).
El segundo tipo, los antropoides, que, por el contrario, imitan a sus creadores de todas las formas posibles: estas criaturas tienen las manos y los brazos, las piernas y los pies, así como las caras (piense en el C-3RO de la misma saga fantástica). Los pocos robots hechos por el hombre que se encontraban entre estas categorías por lo general se parecían a los animales domésticos (por ejemplo, las ropas AIBO de Sony) y no eran más que juguetes divertidos.
Pero esto ya no es un juguete; a la robótica se le ocurrió (pero tarde) que habían pasado por alto algo. Un gran diseñador natural - evolución - resolvió problemas que ni el widgethoop ni los antropoides podían manejar. Entonces, ¿por qué no imitar a estos modelos probados y comprobados, pensaron los ingenieros, en lugar de tratar de superar a 4 mil millones de años de selección natural?
El resultado es una variedad vibrante de robots de tipo animal. Ahora los ingenieros copian no solo perros, sino también musarañas muy sensibles, candelas de aves acuáticas, agarrando pulpos, lagartos rastreros y moluscos de madriguera. Los científicos incluso tratan de imitar a los insectos en forma de robots que se elevan en el aire, batiendo sus alas. Esta dirección de investigación empujó el widget y los antropoides. Pero en primer plano, con confianza, hizo un tipo de zoológico.
El ejemplo de Cecilia Laski y su equipo de investigación dirigido por la Escuela de Estudios Avanzados de Santa Ana en Pisa ilustra claramente esta tendencia. Son el líder de un consorcio internacional para la creación de un robot pulpo.
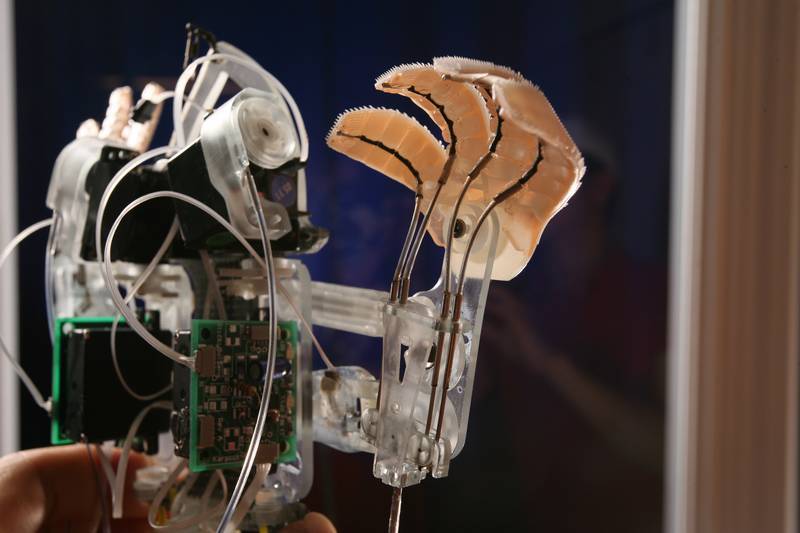
Para crear un cefalópodo artificial, los científicos comenzaron con una masacre, en el sentido literal y figurativo, del órgano de este animal: tentáculos flexibles. Las patas de los vertebrados están diseñadas de modo que muevan los músculos y los huesos tengan peso. Y los tentáculos del pulpo no tienen huesos, por lo que sus músculos deben hacer ambas cosas. La ventaja es que además de la captura ajustada de objetos, el tentáculo también puede llegar a esas esquinas y arrastrarse a las grietas que no son accesibles para los vertebrados que tienen patas de tamaños similares.

Después de explorar los tentáculos, Laski y su grupo crearon un tentáculo artificial que se comporta de la misma manera que el natural. Su cubierta exterior está hecha de silicona y tiene sensores de presión que transmiten información sobre los objetos que el tentáculo está tocando. Dentro de la funda hay cables y resortes con una aleación de níquel-titanio altamente elástica. Gracias a este tentáculo se puede envolver alrededor del movimiento del objeto, sorprendentemente similar al natural.
Concursos artesanales
Si bien el trabajo de Laski se puede calificar de una sola pierna que un pulpo, ella planea remediar esta situación en dos años, agregando siete tentáculos más y un sistema de control y coordinación. El objetivo es crear una máquina que lo ayude a realizar trabajos complejos bajo el agua, por ejemplo, para cerrar válvulas en oleoductos que fluyen.
Otro grupo de ingenieros liderados por Paolo Darío y César Stefanini en la misma institución también copian animales acuáticos, como una lamprea.
Lamprea - los vertebrados más simples de nuestro tiempo. Al igual que los pulpos, no tienen huesos (aunque tienen un esqueleto de cartílago rudimentario). Su sistema nervioso también es simple, y por lo tanto, es bueno comenzar a investigar una estructura neuronal con ellos, cuyo desarrollo terminó eventualmente con la formación del cerebro humano. Por lo tanto, el grupo Stan Gillner en el Instituto Karolinska (Estocolmo) ha estado estudiando las lampreas durante muchos años para comprender más profundamente cómo funciona el sistema nervioso de los vertebrados.
Recientemente, están considerando una versión de lámpara robot. El dispositivo se llama "Lampetra"; está hecho de segmentos circulares similares a las vértebras cartilaginosas de este animal. Un electroimán está conectado a cada segmento, que activa la corriente de la cabeza a la cola, como la transmisión de una señal nerviosa en un animal vivo. Así que el segmento primero atrae, y luego libera el siguiente segmento, creando un movimiento de onda que empuja el trabajo hacia adelante.

Lampetra tiene ojos en forma de cámaras pequeñas y puede usar el color y la información de la forma obtenida de ellos para sortear obstáculos. El objetivo principal del proyecto es explicar cómo los vertebrados utilizan la percepción para la orientación cuando se mueven. Pero el exclusivo sistema de movimiento Lampetra también puede encontrar aplicaciones útiles, ya que, como resultó, esta es una forma muy efectiva de mover el robot en el agua.
Otro zoólogo que utiliza robots para estudiar el comportamiento de animales reales, Daniel Herman, de la Universidad de Zúrich, explora los moluscos y construye sus versiones de robots. Él está tratando de entender cómo la forma de la concha afecta las posibilidades de que el animal sobreviva.
Muchos tipos de moluscos evitan a los depredadores, enterrándose en el fondo del mar. Para hacer esto, alternativamente mueven la cáscara y la suave y musculosa "pierna", que está contenida en el fregadero. Estas dos partes, a su vez, cumplen el papel de un ancla, mientras que la segunda parte continúa cavando el fondo. Los moluscos también aflojan los sedimentos por chorros de agua que liberan de la cáscara. Gracias a estos dispositivos, en caso de peligro, pueden desaparecer del ojo en cuestión de segundos.
Para entender cómo sucede esto realmente, Herman diseñó el robot clam. Tiene una concha de bivalvo, dos venas que pueden doblar y diluir la faja, así como una pequeña bomba que expulsa el agua. El investigador todavía está trabajando en la estructura de la pierna. Cuando está convencido de que un mecanismo de este tipo puede ser excavado con éxito, organiza competiciones de robots-moluscos con diferentes formas de concha para ver qué forma es más efectiva. Herman planea recrear varios moluscos extintos. Cuando sus copias mecánicas muestren de lo que son capaces, podrá probar la hipótesis de que las conchas modernas han sobrevivido debido a que su forma de concha les permite enterrarse en el lecho marino de manera más eficiente que las especies más antiguas.
Agárrate fuerte
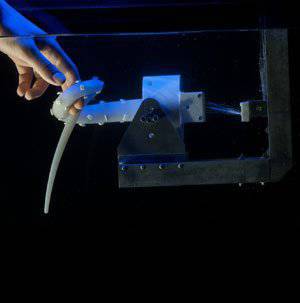
Los proyectos mencionados anteriormente no solo tienen interés científico, sino también orientación práctica. Un buen ejemplo es StickybotIII (del inglés sticky 'sticky' and robot), un robot gecko que fue desarrollado por un grupo de investigadores liderado por Mark Kutkoski.
Las personas se han sorprendido durante mucho tiempo de cómo los geckos pueden escalar paredes y caminar sobre techos. Un robot con tales habilidades sería útil en varios campos. El secreto de un gecko es que sus dedos están cubiertos por hileras de delicadas formaciones que se asemejan a cicatrices, que son visibles en las huellas dactilares humanas, pero con grandes hendiduras. Cuando se presiona un dedo contra la superficie, las moléculas de estas cicatrices atraen a las moléculas de la superficie debido a un fenómeno electrostático llamado fuerza de Van der Waals. Si el animal (o robot) no es demasiado pesado, esta fuerza es suficiente para mantener los dedos en contacto con la superficie.
Como un gecko real, el StickybotIII tiene cuatro patas, y sus dedos están cubiertos con cicatrices similares. Este lagarto mecánico es capaz de realizar los mismos trucos que un vivo: no solo puede escalar una pared vertical, sino que también puede superar una pared con una repisa.
El uso de robots zoomorfos no se limita a métodos inteligentes de movimiento. También pueden imitar los sentidos, cuya sensibilidad supera con creces las capacidades humanas. Por ejemplo, Tony Prescott y su equipo de investigación en la Universidad de Sheffield (Inglaterra) están tratando de recrear las antenas hipersensibles del castor enano.
Estas musarañas viven bajo tierra y, cuando se mueven en sus madrigueras, usan antenas para orientarse. Investigadores ingleses estudiaron el video en cámara lenta de la musaraña blanca y encontraron que conducían constantemente con un bigote, tocando dos veces todo lo que parecía interesante.
Usando esta información, los investigadores diseñaron el Shrewbot (del inglés. Shrew 'shrew' and robot), que reproduce el dispositivo de la cabeza de este pequeño animal. El dispositivo tiene antenas 18 de diferentes longitudes; un programa especial los impulsa, cada uno independientemente de los otros, y utiliza la información recopilada para decidir si vale la pena explorar más el objeto. Por ahora, Shrewbot puede distinguir una superficie lisa de una ranurada. Los investigadores esperan que pronto pueda reconocer las formas básicas, como esferas, cubos y cilindros. Planes para el futuro: construir un robot que funcione donde la visión no ayuda mucho, por ejemplo, en edificios llenos de humo.
Todo esto es muy bueno, y el robot de rescate es una cosa muy útil. Pero muchos ingenieros están especialmente interesados en crear un robot que pueda moverse como insectos: volar, batir sus alas, flotar, flotar en el aire. Equipados con una cámara, pequeños robots volátiles de este tipo podrían meterse en lugares que son demasiado pequeños o peligrosos para la gente, por ejemplo, búnkeres hostiles, e informar sobre lo que está sucediendo en ellos.
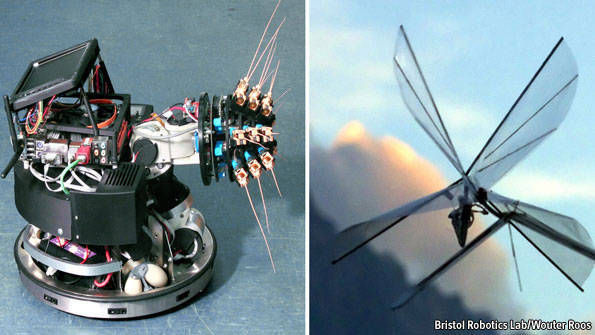
Los investigadores, liderados por Rick Ruisink, de la Universidad Tecnológica de Delft (Países Bajos), han desarrollado DelFly, un robot robot de mariposa que tiene dos pares de alas y un motor eléctrico que los obliga a hacer movimientos de aleteo. DelFly puede volar rápido, y tal vez flotar en el aire para ver mejor un lugar determinado. La primera versión tiene un control remoto, es decir, no es un robot real y autónomo. Pero está equipada con una cámara de video y puede usar la información recopilada para ajustar la altura y la dirección de vuelo. Los investigadores esperan poder ampliar las habilidades de su creación para que se vuelva completamente autónoma en el futuro.
Vuelo de fantasía
Otro robot volador, AirBurr, diseñado por Jean-Christopher Zuhfri de la Escuela Politécnica de Lausana, está construido de manera diferente. En el exterior, no se parece en nada a un insecto, sino que se comporta exactamente como un insecto. Esto se manifiesta, en particular, en cómo se enfrenta a los obstáculos. En lugar de evitarlos con todas sus fuerzas, puede recuperarse rápidamente de una colisión accidental con una pared y volar. Para hacer esto, su ala en forma de lágrima y sus pequeñas hélices están protegidas por varillas flexibles que reciben el golpe, y el propio robot está equilibrado de modo que, incluso si cae al suelo, siempre está hacia arriba con una hélice para despegar de inmediato en el aire. Por esto, se parece a un bicho molesto, que vuela por su habitación, a pesar de todos los intentos de detenerlo con un matón.
La conclusión de este estudio es que el robot no tiene que parecerse a un animal para imitar su comportamiento. Los futuros robots probablemente se parecerán a monstruos medievales: cabezas musculosas, tentáculos de pulpo, cuerpo lamprea. Pero lo más probable es que desarrollen dispositivos no universales, pero especializados que cooperarán entre sí: trabajos aéreos de reconocimiento para transmitir información a trabajos terrestres o acuáticos, cada uno de los cuales realizará su propia tarea específica. Juntos formarán, podría decirse, la esfera robot.
información