¿Cómo salvar submarinos nucleares?

El 7 de abril, 1970, completando el servicio militar en el Mediterráneo y entrando en el Atlántico, el submarino soviético K-8 del proyecto 627A se dirigió a su base norte. De repente, en su tercer compartimiento, los cartuchos de regeneración química se encendieron, destinados a limpiar la atmósfera de la nave. Tomó bastante tiempo para que el fuego se convirtiera en un incendio a gran escala. Como debería ser, la protección de emergencia de los reactores funcionó, las turbinas se detuvieron. El generador diésel de reserva no pudo arrancarse y el submarino se quedó sin electricidad, lo que complicó significativamente la lucha por la capacidad de supervivencia, que sin embargo duró más de tres días. Habiendo volado los tanques de lastre, el bote flotó a la superficie. Mientras tanto, el fuego se extendió a través de la nave. Las glándulas externas se quemaron en dos compartimientos de popa (sellos de cables retirados del casco sólido de la embarcación). El agua comenzó a fluir hacia los compartimentos, lo que condujo a la aparición de un recorte negativo creciente (inclinación hacia la popa). Después de dos días, el suministro de aire a alta presión se secó, y no había nada que pudiera restringir el flujo de agua hacia los compartimentos. El barco estaba condenado, era necesario salvar a la tripulación. Se acercaron naves de superficie a parte de los marineros. Y el centro continuó recibiendo órdenes categóricas, hasta la última pelea para salvar la nave. En la mañana del mes de abril, 12, el proceso de aumentar el ajuste fue como una avalancha, y el barco, tomando una posición casi vertical a popa, se fue rápidamente al fondo, llevándose las vidas de los navegantes de 52.
Después de 16 años después de esta tragedia, otra APL soviética estaba nuevamente en peligro en las aguas del Atlántico. Ahora era K-219, un submarino estratégico que transportaba misiles balísticos 16 con cargas nucleares en sus minas. 16 de octubre El 1986 del año en el barco de servicio, se produjo un incendio en el compartimiento de misiles. La causa del incendio es la destrucción del cohete con la violación subsiguiente de la estanqueidad de la mina y el impacto de los componentes del propelente en el compartimiento. Además, el desarrollo de la catástrofe tuvo lugar de acuerdo con el escenario ya familiar: el fuego se extendió a compartimentos, se quemaron los sellos externos, el agua entró en los compartimentos y, como resultado, se incrementó el ajuste, lo que condujo a la pérdida de estabilidad longitudinal del barco. Después de la obstinada hora 15, pero la lucha ineficaz para salvar la nave, se produjo su rápida inundación. Esta vez tomaron en cuenta la triste experiencia de K-8 y la mayoría de la tripulación fue transportada a tiempo a los barcos que se acercaban. En el barco solo había nueve personas encabezadas por el capitán. Cinco de ellos lograron escapar, cuatro con el submarino descansaron en el fondo del océano a una profundidad de aproximadamente 5000 m.
K-278 "miembro de Komsomol"
Menos de tres años después, la Marina soviética se sorprendió por una nueva tragedia: la muerte del submarino Komsomolets. Este barco único, construido de acuerdo con el proyecto 685 desarrollado por Rubin Central Design Bureau (código "Fin"), ingresó en el Libro Guinness de los Registros después de que se estableciera la Profundidad de Récord Mundial para submarinos de combate (1985 m) en 1027. 7 Abril 1989 del año en las horas 11, cuando el submarino, a una profundidad de 400 m, regresaba de su quinto viaje autónomo, se produjo un incendio en su compartimiento 7 de popa. Después de solo 11 minutos, el barco, completando un ascenso de emergencia, estaba en la superficie del mar tormentoso noruego. Una lucha desesperada comenzó a salvar la nave. Y nuevamente, como en los casos ya descritos, el flujo de agua en los compartimentos de alimentación condujo a un ajuste negativo.
Sobre perturbación y aterrizaje
Aquí es necesario explicar por qué este proceso es tan peligroso para los submarinos. Una de las características más importantes de cualquier barco de desplazamiento es la estabilidad, considerada como la capacidad de un barco, deducida por una influencia externa desde una posición de equilibrio, para regresar a ella después de la terminación de esta influencia. Hay estabilidad transversal y longitudinal, es decir, la capacidad de restablecer el equilibrio después de la ocurrencia de un rollo o corte, respectivamente. El submarino, cuyo casco en forma de huso tiene una longitud sustancialmente mayor que el ancho, es particularmente sensible al recorte: desviaciones de la posición horizontal en la dirección longitudinal. Cuando el barco está en movimiento, las diferencias que surgen por una u otra razón se cancelan por la acción de sus timones hidrodinámicos horizontales. Pero en el barco, al no tener rumbo, las superficies de control hidrodinámico, por supuesto, no funcionan. Puede luchar con los adornos solo moviendo las cargas de peso dentro de la nave en relación con su centro de gravedad, reduciéndolas desde el lado donde tiene lugar la inclinación o incrementándolas desde la parte posterior para nivelar la embarcación. En realidad, este procedimiento consiste en purgar uno y llenar con agua otros tanques de lastre ubicados en la proa, la popa ya lo largo de los lados del submarino. Naturalmente, desde cualquier lado del centro de gravedad aumente el peso, esto lleva a un aumento en el calado del barco, el tercer parámetro (junto con el balanceo y el ajuste) que determina el aterrizaje del barco en el mar. Aterrizaje, que tiene una nave útil en aguas tranquilas, llamada equilibrio. Al mismo tiempo, el balanceo y el ajuste están completamente ausentes, y el calado es tal que el barco se sumerge en agua en una línea de agua constructiva (calculada). Cuando el submarino se encuentra en la superficie en el mar tormentoso, las olas, al moverlo, cambian continuamente los tres parámetros que determinan el aterrizaje. Si el submarino está en el estado normal (intacto) y posee la estabilidad necesaria, sus oscilaciones ocurren en relación con la posición de equilibrio y no representan un peligro, a menos que, por supuesto, excedan los valores críticos. La situación es completamente diferente cuando, como resultado del accidente y el daño resultante, el submarino tiene un aterrizaje distinto del equilibrio en la posición de la superficie, es decir, cuando incluso en ausencia de agitación del mar, los ángulos del talón y el ajuste de la nave no son cero, y su calado no está en una línea de flotación constructiva. Esta circunstancia debe tenerse continuamente en cuenta durante la lucha por la supervivencia de los submarinos de emergencia. Combatir el fuego inundando los compartimientos de emergencia, nivelando el rollo o la moldura que surgió con el método de soplar tanques de lastre (especialmente en la proa o en la popa del barco), se debe entender cómo estas medidas afectan el cambio en la moldura. No es nada fácil de hacer, ya que la percepción subjetiva puede fallar, y no hay lugar para obtener información objetiva sobre la posición espacial real del barco.
En el caso de la catástrofe de Komsomoltsa, prácticamente toda la lucha por salvar el submarino nuclear tuvo lugar en la superficie y duró casi seis horas. El fuego, que se extendió a tres compartimentos de forraje, se logró domar. Pero en la lucha contra el fuego, se cometieron una serie de errores que llevaron a un aumento gradual pero constante en el recorte negativo. Menos de una hora antes de la muerte del submarino, su alimentación se hundió en el agua, de modo que un estabilizador de alimentación suficientemente alto desapareció bajo el agua. Para entonces, el valor de la estabilidad longitudinal de la embarcación seguía siendo tan pequeño que era evidente el rápido crecimiento del ajuste y el resultado trágico. Esto fue confirmado por fotografías tomadas desde un avión de rescate que llegó desde Severomorsk. En 17: 08, el barco de equipamiento en la popa en 80 ° (es decir, casi verticalmente) se sumergió bajo el agua. La tripulación, que estaba en la cubierta superior, estaba en el agua helada. De los navegantes de 69, 27 sobrevivió.
Entonces, las tres catástrofes, comenzando con un incendio, terminaron en la destrucción del submarino como resultado de la pérdida de estabilidad longitudinal y la inundación instantánea. Esto se observó en los documentos de la comisión gubernamental que trabajan para establecer las causas de la muerte de Komsomolets. La Comisión encargó a una de las empresas del Ministerio de Construcción Naval desarrollar un conjunto de hardware diseñado para monitorear objetivamente los parámetros del aterrizaje de submarinos en una emergencia. Los resultados del desarrollo fueron planeados para ser utilizados en los proyectos de submarinos de próxima generación.
Matemática elemental
Los términos de referencia preparados uno de los CDB, diseñado el submarino. El trabajo de desarrollo (OCD) comenzó en el año 1993. Pronto quedó claro que el principal problema era la ausencia de un algoritmo con el que sería posible determinar los parámetros del aterrizaje de un barco en las condiciones de la naturaleza aleatoria de las olas del mar. Por lo tanto, fue a partir de la búsqueda del algoritmo que comenzó el TOC. Expertos de muchas de las principales organizaciones científicas y de diseño de la construcción naval y la Armada participaron en su desarrollo. Junto con ellos, crearon y probaron métodos de modelado matemático y experimentalmente tres variantes del algoritmo. Uno de ellos (el algoritmo del profesor en el Instituto de Fabricación de Instrumentos de Sebastopol, Yu. I. Nechaev) fue aprobado por el cliente del desarrollo, el Instituto de Investigación de Construcción Naval, y fue adoptado para su uso en proyectos de desarrollo.
El algoritmo de Nechaev se desarrolló analizando los materiales de los experimentos realizados utilizando modelos radiocontrolados de varios tipos de embarcaciones marinas en olas naturales. Luego se probó en uno de los barcos del Mar Negro flota y en barcos de la flota de transporte.
El principio de operación desarrollado de acuerdo con este algoritmo KPORP basado en el monitoreo continuo de los valores actuales de los tres parámetros del barco de aterrizaje: ángulos de talón y ajuste, así como el calado. Todos estos parámetros para una nave de emergencia en condiciones de excitación marina son aleatorios. Acumulados durante un cierto período, los datos para cada uno de los parámetros se promedian a lo largo del tiempo, y luego los resultados obtenidos se complementan con las correcciones calculadas de acuerdo con el algoritmo adoptado.

Tubos sensibles
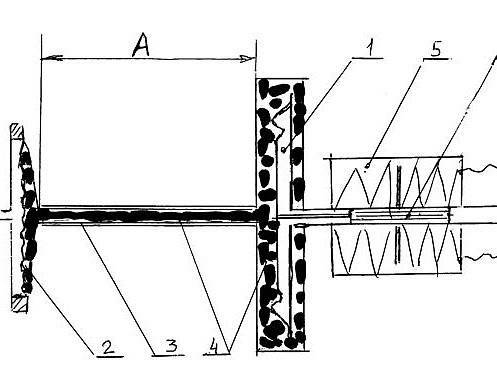
La implementación del algoritmo KPORP adoptado se lleva a cabo utilizando un conjunto de sensores de los valores actuales de talón, ajuste y calado. Para medir los ángulos de balanceo y ajuste, se desarrollaron dos sensores que se estandarizaron al máximo, uno de los cuales (inclinómetro) está ubicado en el plano del bastidor intermedio (sección transversal promedio del casco del submarino) y el segundo (trimómetro) en el plano central de la nave. El principio del sensor se basa en el control de la presión o el vacío que se produce en la cavidad interna de una caja de membranas altamente sensible como resultado de la inclinación de un tubo conectado a esta cavidad llena con un líquido especial no congelante de cierta densidad. Cuando, en el balanceo (trim) del barco, el extremo del tubo está sobre la caja de la membrana, se produce un exceso de presión en la cavidad de la caja, que es proporcional a la longitud del tubo multiplicada por el seno del ángulo de inclinación y el peso específico del fluido que llena el tubo. Cuando se inclina en la dirección opuesta, el extremo del tubo desciende con respecto a la caja de membrana, lo que provoca un vacío en él que es proporcional a los mismos valores. Para sellar la cavidad llena de líquido, así como para compensar la expansión térmica del líquido, sirve un diafragma elástico de casi cero rigidez, montado en el extremo del tubo opuesto a la caja de la membrana. También sirve para compensar las fluctuaciones en la presión del aire en el compartimiento, que afectan por igual al exterior de la caja de membrana y al diafragma elástico. Cuando se produce una presión (o depresión) en la cavidad de la caja de la membrana (debido a la inclinación), ésta se flexiona elásticamente y su centro se mueve hacia un lado o el otro del núcleo del transductor eléctrico, a cuya salida surge una señal de la polaridad correspondiente. Los sensores de balanceo y corte se diferencian entre sí solo por una dimensión básica: la longitud del tubo lleno de líquido, que es inversamente proporcional al seno del valor límite del ángulo monitoreado. Debido al hecho de que los valores límite de los ángulos de ajuste son significativamente menores que el talón, para obtener la misma señal en la salida de ambos sensores, el tubo del sensor de ajuste debe ser más largo.
La medición del calado se realiza mediante un par de sensores de caída de presión, cuya cavidad dinámica está conectada con el espacio por la borda debajo del rumbo del submarino, y la cavidad estática con la atmósfera. Utilizan dos sensores de presión diferencial idénticos con diferentes límites de medición, ubicados en el mismo plano y en la misma vertical, pero en diferentes niveles. Dependiendo del valor real del borrador actual, las lecturas se toman de uno de los sensores (superior o inferior), logrando la precisión de medición requerida. Al convertir la presión hidrostática al tiro en el sistema de coordenadas asociado con el casco del barco, se tienen en cuenta los valores actuales de los ángulos del talón y el trim.
El conjunto de dispositivos también incluye un bloque de transductores secundarios de los sensores mencionados anteriormente y una unidad de información computacional (WBI), que es una mini-computadora. Los datos de salida se envían al WBI, que implementa el algoritmo ingresado en su memoria, y también proporciona la introducción de enmiendas a los valores de los parámetros medidos.
El modelo KORPP fue fabricado y pasado bajo la supervisión de la comisión interdepartamental un ciclo de prueba de múltiples etapas, que incluye pruebas de resistencia a todo tipo de influencias mecánicas y climáticas, así como pruebas en un soporte de rodillos multidimensional. Al mismo tiempo, la capacidad de servicio de un KPORP se probó con efectos separados y simultáneos de dos tipos de lanzamiento con la configuración de los ángulos de balanceo y ajuste que simulan la posición de emergencia del barco. Los resultados de las pruebas confirmaron el cumplimiento total de los TORC con los requisitos de los TOR, tanto en términos de la precisión de la determinación de los parámetros de aterrizaje de equilibrio como en términos de resistencia a todos los tipos de efectos a bordo.
Juego de presion
Un complejo de soluciones técnicas originales ayudó a mantener un control automático constante sobre el aterrizaje de la nave submarina. El sistema sensor responde a los cambios en la presión del fluido y del aire.
información